КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
САР дымососа
|
|
|
|
Регулятор разрежения (РР) должен обеспечивать устойчивое разрежение в топке в пределах 20–40 Па (2–4 мм в. ст.), способствуя полному удалению продуктов горения из топки. РРполучает сигнал разрежения от датчика разряжения и сигнал задания на величину разряжения в топке.
Из-за разброса значений разрежения по зонам топки датчик разрежения обычно устанавливают в верхней части топочной камеры.
Так как давление в топке котла должно быть неизменным во всех режимах и во всем диапазоне производительности, удобнее всего его величину занести в поле программируемых параметров контроллера, хотя допускается управление от встроенного потенциометра.
Регулятор воздействует непосредственно на изменение положения направляющих аппаратов дымососов или на скорость двигателей дымососов при наличии регулируемого электропривода.
Основным возмущением для системы регулирования разрежения является изменение расхода топлива (и, как следствие, изменение расхода воздуха). Поэтому регулирующее воздействие регулятора подачи топлива следует подать не только на изменение подачи воздуха, но и на вход регулятора разряжения.Изменение положения направляющих аппаратов вентиляторов одновременно приводит в движение направляющие аппараты дымососов, так что разрежение в топке практически остается неизменным.
Объект регулирования (топка котла) по подаче топлива с выходом по разряжению не имеет транспортного запаздывания, обладает малой инерционностью и значительным самовыравниванием (рис. 14.17).
Однако отрицательным свойством участка являются колебания регулируемой величины около среднего значения с амплитудой
30–50 Па и частотой до нескольких герц (5–10 Гц).
|
|
|
Такие пульсации зависят от большого числа факторов, в частности от пульсаций расходов топлива и воздуха, вызванных пульсациями в работе тягодутьевых устройств. Это затрудняет работу регулирующих приборов, вызывая их частые срабатывания. Для сглаживания пульсаций перед первичным измерительным преобразователем устанавливают специальные демпфирующие устройства (шайбы, баллоны, емкости) или используют электрический демпфер измерительного блока регулирующих приборов с передаточной функцией W дф:
W дф =1 / Т дф р + 1,
где Т дф – постоянная демпфирования.
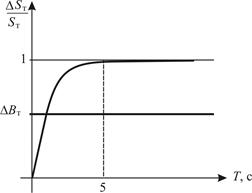
Рис. 14.17. Кривые переходного процесса по разряжению
котла при возмущении расходом топлива:
D В – подача топлива; D S т – выход по разряжению
при воздействии подачи топлива
При синтезе САР следует учитывать большие пульсации сигнала обратной связи по разряжению, отражающие реальную картину изменений разряжения в топке котла, также значительное транспортное запаздывание в воздушном тракте от дымососа до датчика разряжения. Величину запаздывания желательно определять экспериментально по кривой разгона, подавая в ручном режиме импульс на изменение разряжения.
До 1980-х годов основными регулирующими аппаратами воздухо-дутьевых механизмов являлись КТС «Контур» с регуляторами Р25 и КТС «Контур-2» с регуляторами РС29 в комплекте с ИМ постоянной скорости. На замену аппаратной реализации законов регулирования пришли цифровые регуляторы типа «Ремиконт» (регулирующие микропроцессорные регуляторы) и др. В настоящее время фактически стандартом является применение частотно-регулируемых электроприводов на дутьевых механизмах котельных.
Структурная схема системы управления частотно-регулируемым электроприводом дымососа представлена на рис. 14.18.
В данной схеме сигнал Р газа придает САР дымососа частичную инвариантность по возмущению Р газа, т.е. с увеличением подачи газа заблаговременно увеличивается и скорость двигателя дымососа. При правильной настройке W кор и W рег.разр возможно реализовать и полную инвариантность по возмущению. W кор и W рег.разр реализуются в современных регуляторах в цифровом виде.
|
|
|
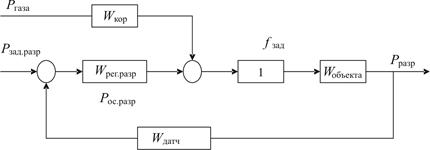
Рис. 14.18. САУ разряжением с частотно-регулируемым электроприводом:
Р зад.разр – задание разряжения в топке котла (2–4 мм в. ст. в рабочем
режиме, 0,5–1 мм в. ст. при розжиге и начальном диапазоне работы);
Р газа – сигнал с датчика давления газа перед горелками, характеризующий задание производительности котельной установки; W объекта – передаточная функция объекта
Р газа, Р ос.разр обычно в аналоговом виде (токовый сигнал) поступают на плату ввода программируемого микропроцессорного контроллера управления.
Электропривод дымососа во всех режимах работы котла – вентиляции, розжига, производительной работы, поддерживает постоянное разрежение в котле, т.е. работает в режиме регулятора разрежения. Розжиг горелок при отсутствии достаточного разрежения в топке не разрешается.
В электроприводах дымососа и вентилятора предусмотрены режимы автоматического повторного включения с подхватом вращающегося по инерции электродвигателя и выходом в прежний рабочий режим (без торможения и повторного пуска) при кратковременных (до 10 с – время программируется) перерывах питания (например, при автоматическом вводе резерва питающей сети). Это позволяет исключить аварийные остановки и повторные пуски котла.
Общая система управления дымососом включает: автоматическое регулирование скорости и ручное управление направляющим аппаратом.
В режиме розжига и аварийном режиме нередко работает ручная система управления направляющем аппаратом. Направляющий аппарат работает в импульсном режиме согласно тахограмме, где за каждый импульс аппарат отрабатывает определенный угол. Для информации о полном открытии или закрытии направляющего аппарата (шибера) используют конечные выключатели.
При переходе от дистанционного автоматического управления на ручное необходимо:
¨ установить переключатель автоматического управления в положение «отключено»;
¨ на исполнительных механизмах типа МЭО:
|
|
|
– сочленить маховик на ИМ с промежуточным валом редуктора и растормозить редуктор;
– вращать маховик в нужную сторону, изменяя тем самым положение направляющего аппарата;
– при окончании ручного управления необходимо маховик отжать к себе и отпустить рычажок растормаживания, тем самым восстановив автоматическое управление от электродвигателя.
|
|
|
|
|
Дата добавления: 2015-05-29; Просмотров: 2495; Нарушение авторских прав?; Мы поможем в написании вашей работы!