КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Плоска система сил
|
|
|
|
Система довільно орієнтованих сил ( ), які лежать в одній площині, утворюють плоску систему сил. Введемо в цій площині декартову систему координат
), які лежать в одній площині, утворюють плоску систему сил. Введемо в цій площині декартову систему координат  . Для того, щоб під дією плоскої системи сил тверде тіло знаходилось в рівновазі, необхідно і достатньо, щоб виконувались наступні умови:
. Для того, щоб під дією плоскої системи сил тверде тіло знаходилось в рівновазі, необхідно і достатньо, щоб виконувались наступні умови:
 =
=  = 0, (4.1)
= 0, (4.1)
 =
=  = 0, (4.2)
= 0, (4.2)
 =
=  = 0. (4.3)
= 0. (4.3)
Рівняння (4.1) та (4.2) – це рівність нулю суми алгебраїчних проекцій усіх сил на осі  та
та  . Рівняння (4.3) – це рівність нулю суми моментів сил відносно довільної точки
. Рівняння (4.3) – це рівність нулю суми моментів сил відносно довільної точки  , яка лежить в цій площині.
, яка лежить в цій площині.
Задача буде статично визначеною, коли число невідомих в системі рівнянь (4.1) – (4.3) буде не більше трьох і ця система не буде виродженою.
Для розв’язання задач статики для плоскої системи сил треба чітко знати способи закріплення твердих тіл та реакції цих закріплень (в’язів). Основні способи закріплень твердого тіла (ТТ) у випадку плоскої системи сил та відповідні реакції в’язів наведені у таблиці 4.1.
Таблиця 4.1. Основні способи закріплень твердого тіла (ТТ) у випадку плоскої системи сил та реакції, які виникають
| Типи в’язів та їхні реакції | Позначення | Реакції в’язів |
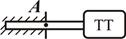
1. Жорстке защемлення: момент защемлення  (який перешкоджає обертанню тіла навколо точки в площині рисунка) і реакція (який перешкоджає обертанню тіла навколо точки в площині рисунка) і реакція  , яку розкладають на дві складові , яку розкладають на дві складові  та та  (які перешкоджають руху тіла в площині рисунка: праворуч – ліворуч та вниз – вгору). (які перешкоджають руху тіла в площині рисунка: праворуч – ліворуч та вниз – вгору).
| 
| 
|
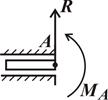
2. Напівзащемлена опора: момент защемлення (який перешкоджає обертанню тіла навколо точки у площині рисунка) і реакція  (яка перешкоджає руху тіла перпендикулярно до осі защемлення). (яка перешкоджає руху тіла перпендикулярно до осі защемлення).
| 
| 
|

| 
| |
| 3. Шарнірно-нерухома опора: реакція виникає в площині рисунку. Цю реакцію представляють двома складовими та (які перешкоджають руху тіла в площині рисунку: праворуч – ліворуч та вниз – вгору).
| 
| 
|
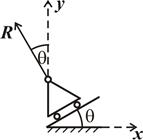
| 4. Жорсткий невагомий стрижень на шарнірах: одна реакція R, яка перешкоджає руху тіла вздовж лінії, що з’єднує шарніри. | 
| 
|
| 5. Шарнірно-рухома опора: одна реакція R, яка перешкоджає переміщеннютіла у перпендикулярному до площини опори напрямі. | 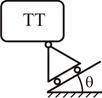
| 
|
|
|
|
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 1181; Нарушение авторских прав?; Мы поможем в написании вашей работы!