КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Интеграл Фурье для непериодических сигналов 3 страница
|
|
|
|
 (3.27)
(3.27)
Высота каждой ступени функции  равна тангенсу угла наклона прямой на соответствующем участке функции
равна тангенсу угла наклона прямой на соответствующем участке функции  (рис. 3.2,б).
(рис. 3.2,б).
После дифференцирования функции получаем приближенное выражение для второй производной сигнала  Последняя состоит из совокупности сдвинутых во времени импульсных дельта-функций, «площадь»
Последняя состоит из совокупности сдвинутых во времени импульсных дельта-функций, «площадь»  каждой из которых равна разности высот — смежных ступеней функции в моменты
каждой из которых равна разности высот — смежных ступеней функции в моменты  .
.
 . (3.28)
. (3.28)
Принимая во внимание, что дифференцированию входного сигнала соответствует дифференцирование выходного, то, определяя сумму произведений известных значений импульсной характеристики звена  на полученную совокупность импульсных дельта-функций
на полученную совокупность импульсных дельта-функций  получим приближенное выражение для второй производной выходного сигнала звена:
получим приближенное выражение для второй производной выходного сигнала звена:
 (3.29)
(3.29)
Рис. 3.2. К графоаналитическому определению интеграла свертки
Для определения искомого выходного сигнала звена  дважды интегрируют выражение
дважды интегрируют выражение  При этом двойное интегрирование производится собственно только один раз для первого участка, а выражение выходного сигнала на последующих участках определяют соответствующим сдвигом во времени и изменением коэффициента . Повышение точности приближенного определения выходного сигнала можно осуществить увеличением числа интервалов при кусочно-линейной аппроксимации входного сигнала
При этом двойное интегрирование производится собственно только один раз для первого участка, а выражение выходного сигнала на последующих участках определяют соответствующим сдвигом во времени и изменением коэффициента . Повышение точности приближенного определения выходного сигнала можно осуществить увеличением числа интервалов при кусочно-линейной аппроксимации входного сигнала  .
.
Примерами линейных инерционных преобразований являются такие операции, как усиление, фильтрация, дифференцирование, интегрирование, которые описываются линейным оператором.
3.3. Преобразование измерительных сигналов в нелинейных цепях
В современных сложных измерительных устройствах все чаще становится необходимой сложная математическая обработка измерительной информации — для линеаризации общей характеристики измерительного прибора получения различных статистических характеристик, автоматизации косвенных измерений, сжатия данных по оси значений, например в логарифмическом масштабе, и др.
|
|
|
Уравнение измерения, реализуемое в каждом измерительном приборе и устанавливающее зависимость между измеряемой величиной x и результатом измерения  , всегда линейно. Если в цепи измерительного прибора используется нелинейный измерительный преобразователь с функцией F, то для обеспечения линейности общего уравнения измерительного прибора необходимо обеспечить устранение этой нелинейности. В аналоговом измерительном приборе это достигается очень просто — с помощью нелинейной шкалы, в которой реализуется обратная функция
, всегда линейно. Если в цепи измерительного прибора используется нелинейный измерительный преобразователь с функцией F, то для обеспечения линейности общего уравнения измерительного прибора необходимо обеспечить устранение этой нелинейности. В аналоговом измерительном приборе это достигается очень просто — с помощью нелинейной шкалы, в которой реализуется обратная функция  . В цифровом измерительном приборе, цифровое отсчетное устройство которого эквивалентно равномерной шкале, устранение этой нелинейности может быть достигнуто различными структурными методами.
. В цифровом измерительном приборе, цифровое отсчетное устройство которого эквивалентно равномерной шкале, устранение этой нелинейности может быть достигнуто различными структурными методами.
Возможны следующие основные структурные системы устранения нелинейности в цепях измерительных устройств:
ü при измерении информативного параметра выходного сигнала нелинейного измерительного преобразователя F цифровым прибором с последующим преобразованием кодового сигнала в цифровом вычислительном устройстве или в нелинейном преобразователе код—код по. функции (3.3,а)
ü получение требуемой нелинейной зависимости в аналоговом нелинейном измерительном преобразователе и последующее преобразование выходного сигнала у линейным аналого-цифровым преобразователем (ЛАЦП) в код. При этом если аналоговый нелинейный преобразователь входит в прямую цепь, то в нем реализуется функция , а если в обратную цепь — то функция F (3.3,б).
ü совмещение операций измерения и получения обратной нелинейной зависимости в одном устройстве — функциональном аналого-цифровом преобразователе ФАЦП. При этом если данное устройство содержит только прямую цепь и основано на методе сопоставления, то в нем реализуется оператор . Если устройство основано на методе уравновешивания, то в его обратной цепи используется функциональный цифро-аналоговый преобразователь, реализующий функцию F (3.3,в).
|
|
|
Рис. 3.3. Основные способы устранения нелинейности
При первых двух способах используются ЛАЦП, в которых значение ступени  остается постоянным. При третьем способе в ФАЦП имеет место нелинейная зависимость ступени от значения входной величины.
остается постоянным. При третьем способе в ФАЦП имеет место нелинейная зависимость ступени от значения входной величины.
Сравнение рассмотренных структурных методов устранения нелинейности показывает, что первый способ линеаризации с цифровым вычислительным устройством целесообразно применять в многоканальных устройствах с большим числом параметров при большом объеме обработки по различным алгоритмам. В связи с дальнейшими миниатюризацией и снижением стоимости матричных функциональных преобразователей код — код первый способ линеаризации становится все более перспективным и в одноканальных измерительных устройствах.
Второй способ применяется наиболее широко, так как обычно реализуется наиболее просто, с помощью аналоговых преобразователей. Третий способ целесообразен при повышенных требованиях к точности преобразования.
Обеспечение линейности измерительных приборов стало настолько насущной проблемой, что осуществляется не только структурными методами, но и заменой нелинейных элементов специально созданными линейными. Например, проволочные нелинейные высокостабильные терморезисторы заменяются высокостабильными линейными. Такое решение становится все более доступным, благодаря развитию науки о направленном изменении свойств материалов.
Нелинейное функциональное измерительное преобразование одного входного сигнала реализуется либо во всем требуемом диапазоне изменения аргумента х, либо по отдельным участкам.
Для реализации логарифмической функции применяются аналоговые функциональные измерительные преобразователи на полупроводниковых диодах:
 (3.30)
(3.30)
Квадратичное преобразование тока реализуется в термоэлектрических преобразователях:
|
|
|
 (3.31)
(3.31)
При этом время преобразования составляет десятые доли секунды. Для мгновенного квадратичного преобразования напряжения используются кусочно-линейные аппроксимирующие устройства на полупроводниковых диодах. Для извлечения квадратного корня используются замкнутые схемы с усилителями с глубокой отрицательной обратной связью, в обратную цепь которых включают квадраторы на основе термопреобразователей или диодных аппроксиматоров.
Измерительные функциональные преобразования нескольких сигналов используются при автоматизации косвенных измерений. Широкое распространение получили измерительные функциональные преобразования двух входных сигналов.
Рассмотрим реализацию метода измерительного преобразования двух входных сигналов на примере трехполюсных функциональных измерительных преобразователей (ТИФП) в виде измерительных преобразователей мощности. Мощность зависит от двух величин — Ах (х) и Аг (х). Если известна функциональная зависимость р=х=f(А1;А2), то х можно определить: косвенно, т. е. путем прямого измерения А1(х) и А2 (х) и последующего вычисления х по известной функциональной зависимости. Это, однако, требует большой затраты труда; путем использования ТИФП, в котором из двух входных величин А1 (х) и А2 (х) создается третья промежуточная величина у, пропорциональная х:
Y = kX (3.32)
Необходимо, чтобы к в этом уравнении в минимальной степени зависело бы от внешних влияющих величин. Далеко не все величины, содержащие информацию об х, удобны для подачи на входы ТИФП. В таких случаях перед ТИФП включают входные преобразователи.
В ТИФП обычно выполняются операции умножения, деления, возведения в квадрат, интегрирования и др. ТИФП применяются в ваттметрах, фазометрах, измерителях отношений — логометрах и во многих других сложных измерительных устройствах. Рассмотрим два примера ТИФП мощности.
1. Простейшим ТИФП мощности является электродинамический измерительный механизм. В результате взаимодействия тока I в неподвижной обмотке  и тока I
и тока I  в подвижной обмотке
в подвижной обмотке  создается вращающий момент Мвр = kIнIп
создается вращающий момент Мвр = kIнIп  cos
cos  .
.
|
|
|
Если
 , (3.33)
, (3.33)
то
Мвр =  IU cos =
IU cos =  (3.34 )
(3.34 )
где U — напряжение на нагрузке, мощность которой измеряют;
 — сопротивление подвижной рамки; Rд — добавочное сопротивление.
— сопротивление подвижной рамки; Rд — добавочное сопротивление.
Вращающий момент закручивает противодействующую пружину на угол
 , (3.33)
, (3.33)
где W- жесткость спиральной противодействующей пружины или растяжки.
Таким образом, в результате операции перемножения в ТИФП мы получаем промежуточную величину у=а=Р. Шкала, которая устанавливается в таком измерительном устройстве, градуируется в единицах мощности. Если мощность нужно измерить при высокой частоте, на которой уже нельзя применить электродинамический измерительный механизм, то применяют электростатический или ТИФП мощности на двух термопреобразователях.
2. В ТИФП мощности на двух термопреобразователях реализуется суммо-разностный способ умножения двух переменных.
Через термопреобразователи ТП1, и  , проходят токи, состоящие из двух составляющих
, проходят токи, состоящие из двух составляющих  и iu =
и iu =  , причем в ТП1 проходит их сумма, а в ТП2–разность. Мгновенные значения термо-ЭДС с термопреобразователями соответственно равны:
, причем в ТП1 проходит их сумма, а в ТП2–разность. Мгновенные значения термо-ЭДС с термопреобразователями соответственно равны:

 (3.35)
(3.35)
Разность мгновенных значений термо-ЭДС е1 и е2 в предположении идентичности и безынерционности термопар

Постоянная времени термопреобразователей во много раз превосходит период  , поэтому переменная составляющая
, поэтому переменная составляющая  почти полностью исчезает, и на выходе получаем только постоянную
почти полностью исчезает, и на выходе получаем только постоянную
 . (3.36)
. (3.36)
Таким образом, получена одна промежуточная величина Y=  = KX, пропорциональная X = Р и зависящая только от Р. измеряется высокочувствительным магнитоэлектрическим милливольтметром, шкала которого может быть проградуирована в единицах мощности Р.
= KX, пропорциональная X = Р и зависящая только от Р. измеряется высокочувствительным магнитоэлектрическим милливольтметром, шкала которого может быть проградуирована в единицах мощности Р.
В этом ТИФП выполняются операции возведения в квадрат, суммирования и вычитания. ТИФП является аналоговым вычислительным устройством, реализующим функцию (а + b)  — (а — b) = 4 аb.
— (а — b) = 4 аb.
Измерение активной и реактивной мощностей и энергии на промышленной частоте основано пока на применении ферро-динамических ваттметров и индукционных счетчиков электрической энергии. В настоящее время для измерения этих величин разработано много электронных измерительных функциональных преобразователей, основанных на методах широтно-импульсной модуляции, двойном интегрировании и др.
3.4. Контрольные вопросы
1. В чем отличие линейных цепей от нелинейных?
2. Назовите необходимые условия линейности идеальной стационарной системы.
3. В чем отличие реальной линейной стационарной системы от идеальной?
4. Назовите существующие методы анализа стационарных линейных систем.
5. Назовите основные характеристики звеньев и систем.
6. Запишите общее выражение для линейной функции преобразования физического звена измерительного канала.
7. Запишите выражение передаточной функции звена с использованием преобразований Лапласа.
8. В чем суть представления сигнала X (t) интегралом свертки?
9. В чем суть приближенного определения интеграла свертки?
10. Какое существует соотношение между частотной характеристикой линейного звена и спектром его импульсной характеристики?
11. Какие существуют структурные методы устранения нелинейности в цепях измерительных устройств?
4. Структуры фильтров, выбор фильтров в зависимости от измерительной задачи и методы их расчета
Задача отделения токов одних частот от токов других решается с помощью специальных устройств, называемых электрическими фильтрами. В зависимости от того, какие из частот выделяются фильтром для передачи сигнала в последующую цепь, электрические фильтры разделяются на фильтры нижних (НЧ) и верхних (ВЧ) частот. Определенное соединение НЧ и ВЧ фильтров позволяет получить полосовые (ПФ) и заградительные (ЗФ) фильтры. Задача ПФ состоит в пропускании токов с частотами, лежащими в пределах заданной полосы частот. ЗФ не пропускают токи с частотами, лежащими в пределах определенной полосы частот. Фильтры нижних частот в свою очередь делятся на две основные группы: фильтры, предназначенные пропускать токи низких звуковых частот и фильтры, предназначенные пропускать только постоянный ток.
Фильтры как устройства, осуществляющие фильтрацию сигналов, очень широко применяются в различных областях техники: в электронной технике они используются практически в каждой сложной системе и приборе; в информационно-измерительной технике — для частотного разделения измерительных каналов, для исключения помех из смеси исследуемого сигнала и помехи, для определения частотного состава сигнала (в анализаторах спектра), для выделения основной гармоники искаженного сигнала (в измерителях нелинейных искажений) и т. д.
Основной характеристикой фильтра является его частотная характеристика, имеющая следующие параметры:
1) коэффициент преобразования
 ; (4.1)
; (4.1)
2) коэффициент затухания
 ; (4.2)
; (4.2)
3) логарифмический коэффициент затухания
 ; (4.3)
; (4.3)
4) крутизна характеристики
 ; (4.4)
; (4.4)
5) ∆fп – частотная полоса пропускания (полоса прозрачности), которая определяется по частоте, при которой K ф уменьшается в  раз по сравнению с максимальным значением К ф при центральной резонансной частоте.
раз по сравнению с максимальным значением К ф при центральной резонансной частоте.
6) ∆fнп – частотная полоса непропускания (полоса непрозрачности).
4.1. Структуры фильтров
Отделение постоянного тока от переменных токов может быть выполнено с помощью определенного включения R, L, C элементов. Если в цепи с постоянным и переменным током параллельно нагрузке включить конденсатор С, то при достаточно большой емкости этого конденсатора переменный ток почти весь проходит через него, а постоянный ток при этом проходит через нагрузку (рис. 4.1). Это осуществимо при условии
 «
«
 (4.5)
(4.5)
Однако, в случае малого сопротивления нагрузки или очень низкой частоте переменного тока, для выполнения условия (4.5) потребуется очень большая емкость конденсатора, что приведет к увеличению габаритных размеров, массы и стоимости устройства.
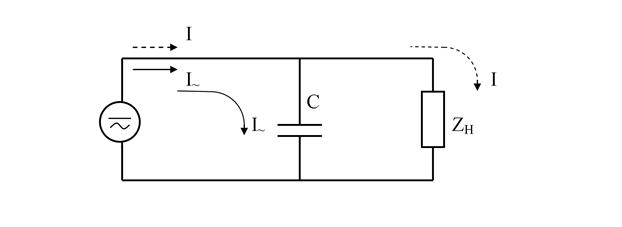
Рис. 4.1. Использование конденсатора в качестве фильтра
При малом внутреннем сопротивлении источника питания в качестве простейшего фильтра можно использовать дроссель L – катушку с обмоткой из толстого медного провода с ферромагнитным сердечником (рис. 4.2).
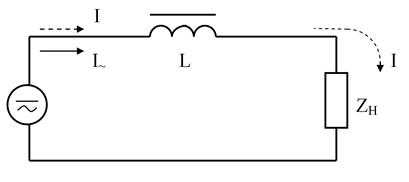
Рис. 4.2. Использование дросселя в качестве фильтра
Так как сопротивление дросселя для переменного тока велико (ωL >> zH), то переменный ток в нагрузке окажется незначительным. Для постоянного тока сопротивление дросселя мало, поэтому он практически весь пройдет к нагрузке. Фильтр из емкости и индуктивности (рис. 4.3) называется Г – образным фильтром. Такое включение реактивных элементов позволяет значительно уменьшить наличие переменной составляющей в нагрузке Zн. Подключив параллельно нагрузке дополнительно конденсатор С2 (рис. 4.4), получаем П – образный фильтр. В случае резкого изменения нагрузки П – образного фильтра изменение напряжения на конденсаторе происходит сравнительно медленно, и он поддерживает напряжение на нагрузке на прежнем уровне, но зато ток в нагрузке резко изменится, т.е. П – образные фильтры позволяют получить постоянство напряжения при изменениях нагрузки.
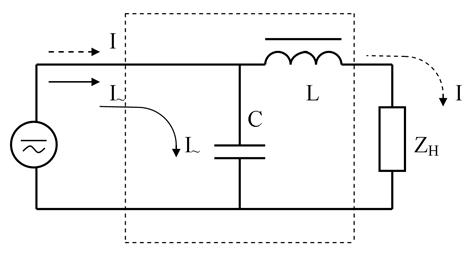
Рис. 4.3. Г- образный фильтр
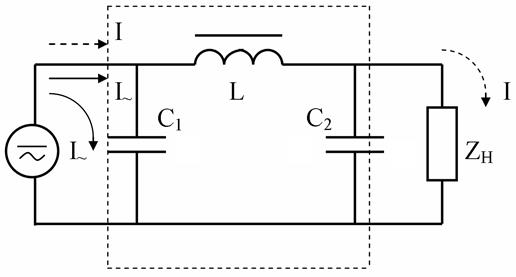
Рис. 4.4. П – образный фильтр
Включение дополнительного дросселя в цепь нагрузки Г – образного фильтра позволяет получить Т – образным фильтр (рис. 4.5). В случае резкого изменения нагрузки изменению тока в нагрузке будет препятствовать стоящий между ней и конденсатором дроссель, в котором будет индуцироваться ЭДС самоиндукции, стремящаяся поддержать ток на прежнем уровне, т.е. Т – образные фильтры обеспечивают постоянство тока на выходе при изменениях нагрузки.
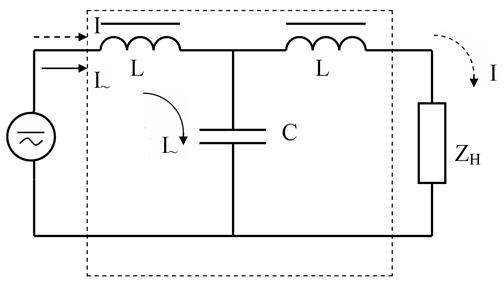
Рис. 4.5. Т – образный фильтр
К недостаткам фильтров с дросселями следует отнести большие габаритные размеры, массу и стоимость. Поэтому часто в тех случаях, когда к фильтру не предъявляется особенно жестких требований, вместо дросселей ставят резисторы (рис.4.6). Это позволяет резко сократить габариты и стоимость фильтров. Основной недостаток таких фильтров заключается в больших потерях мощности в резисторах, поэтому их используют только в тех цепях, где протекают сравнительно небольшие токи.

Рис. 4.6. Фильтры, составленные из конденсаторов и резисторов:
а) – Г – образный; б) – Т – образный; в) – П – образный.
4.2. Фильтры нижних частот
Если ставится задача пропускать только токи всех частот от нулевой до некоторой частоты fср1, называемой частотой среза, то для этой цели используют фильтры нижних частот, построенные по Г, П и Т – образным схемам. Создать идеальный фильтр, абсолютно не пропускающий токов, имеющих частоту выше частоты среза, практически невозможно. Реальные фильтры от идеальных отличаются тем, что крутизна их характеристик конечна; фильтры сравнивают между собой по крутизне характеристик.
Ослабление фильтруемых напряжений или токов оценивается отношением их амплитуд на выходе к амплитудам на входе (4.2). Однако чаще берется не само отношение, а его логарифм. Обычно оценку усиления (или ослабления) затухания производят в децибелах (4.3).
b=  =
=  (4.6)
(4.6)
где P1 – мощность на входе; P2 – мощность на выходе; U1 – напряжение на входе; U2 – напряжение на выходе.
На рис. 4.7 показан график затухания, создаваемого фильтром нижних частот, в зависимости от частоты подведенного к нему напряжения. Для того чтобы эта характеристика фильтра в возможно большей степени приближалась к идеальной, отмеченной пунктиром, необходимо выполнение следующих условий: сопротивление потерь в элементах фильтра должно быть минимальным, число звеньев возможно большим, сопротивление нагрузки определенным образом согласовано с параметрами фильтра.
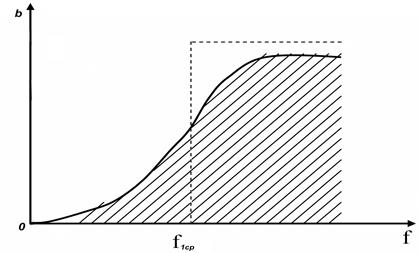
Рис. 4.7. Характеристика затухания фильтра нижних частот
Для выяснения этих условий разобьем схему любого сложного фильтра на элементарные Г – образные звенья, состоящие из емкости и индуктивности, т.е. из двух реактивных сопротивлений противоположного характера Х1 и Х2
(рис.4.8)
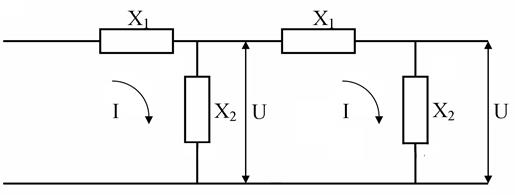
Рис.4.8. Схема фильтра, представленного в виде цепочки Г – образных звеньев
Например, при разделении Т – образного фильтра на два Г – образных звена (рис.4.9) конденсатор С1 можно рассматривают как параллельное соединение двух конденсаторов емкостью С1 / 2.

Рис. 4.9. Разделение Т – образного фильтра нижних частот на Г – образные звена
При разделении П – образного фильтра на Г – образные звенья (рис. 4.10) индуктивность L1 рассматривают как последовательное соединение двух катушек индуктивностью L1/2.
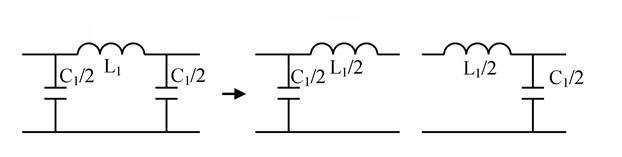
Рис. 4.10. Разделение П – образного фильтра нижних частот на две
Г – образных ячейки
Процесс передачи энергии вдоль ячеек фильтра можно представить следующим образом: переменное напряжение источника на входе возбуждает ток в первом звене фильтра, создающем переменное напряжение на элементе Х2, т.е. на входе второй ячейки, под действием которого в ней возникает ток, и т.д. Если не учитывать потери и допустить, что вся энергия от входа передается на выход, то токи и напряжения во всех звеньях будут одинаковыми. При таком идеализированном режиме работы фильтр с нагрузкой представляет для источника чисто активное сопротивление (вся его энергия поглощается). Это возможно только в том случае, если нагрузка фильтра активная и в реактивных элементах противоположного характера протекают такие токи и действуют такие напряжения, при которых в них развиваются одинаковые реактивные мощности.
Пусть при выполнении данных условий токи во всех индуктивностях элементарных звеньев будут I, а напряжения на емкостях U. При этом реактивная мощность в индуктивности
 =
=  (4.7)
(4.7)
а в емкости
 =
=  (4.8)
(4.8)
Из условия = можно определить, какое сопротивление будет представлять фильтр для источника питания:
Rвх =  =
=  (4.9)
(4.9)
Такое же входное сопротивление должно представлять каждое следующее звено фильтра для предыдущего. Это сопротивление называется волновым или характеристическим сопротивлением W фильтра. Подставим в уравнение (4.9) выражения для сопротивлений X L = ωL 1/ 2 и XC = 2 / ωC 1. Тогда
Rвх = W =  (4.10)
(4.10)
Для того чтобы последнее звено работало также, как предыдущие, не-обходимо, чтобы нагрузка была согласована с фильтром, т.е. чтобы она имела чисто активный характер и равнялась волновому сопротивлению фильтра:
Rн = = W (4.11)
Каждое из Г – образных звеньев представляет собой последовательный контур. На резонансной частоте сопротивление емкостей равно сопротивлению индуктивностей. На более низких частотах сопротивление емкостей быстро возрастает, а сопротивление индуктивностей падает. Поэтому ток с частотой, которая ниже частоты резонанса, встречая малое сопротивление индуктивностей и большое сопротивление емкостей, проходит почти полностью по фильтру от источника к нагрузке. На частотах выше резонансной сопротивление индуктивностей увеличивается, а емкостей – падает. Поэтому ток с частотой, выше резонансной, встречая большое сопротивление индуктивностей, проходит через малое сопротивление емкостей и не достигает нагрузки. Резонансная частота Г – образных ячеек является частотой среза фильтра:
|
|
|
|
|
Дата добавления: 2017-01-14; Просмотров: 269; Нарушение авторских прав?; Мы поможем в написании вашей работы!