КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Интеграл Фурье для непериодических сигналов 4 страница
|
|
|
|
f 1 =  =
=  (4.12)
(4.12)
Из выражений (4.11), (4.12) можно определить расчетные параметры звеньев фильтра по заданным значениям частоты среза и сопротивления нагрузки:
L1 =  (4.13) (4.13)
(4.13) (4.13)
C1 =  (4.14)
(4.14)
Переходя обратно от элементарных Г – образных ячеек к обычным схемам фильтров, легко заключить, что в П – образных фильтрах все катушки должны иметь индуктивность L1, конденсаторы по краям фильтра – емкость С1/2, а конденсаторы, стоящие между катушками, - емкость С1.
В Т – образных фильтрах все конденсаторы должны иметь емкость С1, катушки, стоящие по краям, - индуктивность L1 / 2, а катушки, стоящие между конденсаторами, - индуктивность L1.
Изменение полных сопротивлений элементов фильтра при переходе через частоту среза и, следовательно, крутизна среза характеристики фильтра будут тем меньше, чем больше сопротивления потерь элементов фильтра. Увеличение числа звеньев приводит к увеличению крутизны среза, однако при числе звеньев свыше 3 – 4 крутизна среза возрастает относительно мало. Отсутствие согласования фильтра с нагрузкой приводит к существенному ухудшению характеристики фильтра.
Вопрос об использовании Т – или П – образных фильтров обычно решается в зависимости от конкретных условий и с учетом вышеизложенного: конденсатор имеет малое сопротивление для токов высокой частоты и большое сопротивление для токов низкой частоты; индуктивность имеет малое сопротивление для токов низкой частоты и большое сопротивление для токов высокой частоты.
4.3. Фильтры верхних частот
Фильтры верхних частот должны пропускать токи всех частот выше некоторой частоты, также называемой частотой среза, и задерживать токи всех частот ниже этой частоты. Схемы таких фильтров можно получить, заменив в схемах фильтров нижних частот, выполняющих обратную задачу, элементы, плохо проводящие токи высоких частот, на хорошо проводящие, и наоборот, т.е. заменив конденсаторы на катушки индуктивности, а катушки – на конденсаторы (рис.4.11).
|
|
|

Рис.4.11. Фильтры верхних частот:
а) Г – образный, б) Т- образный, в) П – образный
Типичная частотная характеристика затухания фильтра верхних частот приведена на рис.4.12.

Рис. 4.12. Характеристика затухания фильтра верхних частот
Как и для фильтра нижних частот, эта характеристика тем больше приближается к идеальной, чем меньше потери в фильтре, больше число звеньев и чем лучше он согласован с нагрузкой. Волновое сопротивление фильтра определяется здесь также из условия равенства реактивной мощности в сопротивлениях противоположного характера, образующих Г – образные звенья, на которые может быть разбит весь фильтр. Например, Т – образный фильтр (рис. 4.13,а) и П – образный фильтр (рис. 4.14,а) можно считать составленными каждый из двух Г – образных звеньев, если представить дроссели L1 составленными из двух параллельно включенных дросселей индуктивностью 2L1 каждый, а конденсаторы С1 – в виде последовательного соединения двух конденсаторов емкостью 2С2 каждый.

Рис. 4.13. Разделение Т – образного фильтра верхних частот (а) на два
Г – образных звена (б)

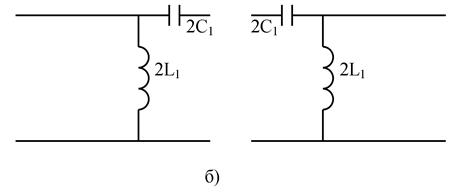
Рис. 4.14. Разделение П – образного фильтра верхних частот (а) на два
Г – образные звена (б)
Используя соотношение (4.10) определим волновое сопротивление фильтра. Так как Х с = ½ ωС 1 и Х L = 2ωL 1, то для фильтров верхних частот волновое сопротивление рассчитывается также по формуле
W = 
Каждое звено фильтра представляет собой колебательный контур, резонансная частота которого
f 2 =  =
=  (4.15)
(4.15)
На резонансной частоте сопротивления элементов звеньев фильтра одинаковы. С увеличение частоты сопротивление емкостей быстро падает, а индуктивностей – растет. Поэтому ток с частотой, значительно больше резонансной, легко проходит от источника через конденсаторы фильтра к нагрузке, не испытывая заметного шунтирующего влияния со стороны катушек. Эквивалентное сопротивление звена имеет для тока этой частоты емкостный характер. Следовательно, фильтр будет прозрачен для частот более высоких, чем f2. Для токов более низких частот сопротивление емкостей будет увеличиваться, а индуктивностей уменьшаться, и ток от источника будет замыкаться через катушки, не проходя к нагрузке. Это проявляется тем резче, чем больше число звеньев в фильтре и чем меньше активные потери в них. Таким образом, резонансная частота ячеек f2 является частотой среза фильтра.
|
|
|
По заданной частоте среза и сопротивлению нагрузки, используя условие R H = W, легко получить формулу для расчета элементов фильтра верхних частот:
L1 =  (4.16)
(4.16)
C1 =  (4.17)
(4.17)
Переходя от элементарных звеньев к обычным схемам фильтров, легко заключить, что в Т – образных фильтрах крайние конденсаторы должны иметь емкость 2С1, а конденсаторы, стоящие между катушками, – емкость С1; все катушки должны иметь индуктивность L1. В П – образных фильтрах крайние катушки должны иметь индуктивность 2L1, а катушки, стоящие между конденсаторами, – индуктивность L1; все конденсаторы должны иметь емкость С1.
4.4. Полосовые и заградительные фильтры
Часто в радиотехнических устройствах оказывается необходимым пропустить в некоторою цепь токи заданной полосы частот, лежащей в пределах от f 1 до f 2. Эту задачу можно решить путем последовательного включения фильтра нижних частот, имеющего частоту среза f2ср, и фильтра верхних частот с частотой среза f1ср. Результирующая характеристика затухания такого составленного фильтра приведена на рис. 4.15.

Рис. 4.15. Характеристика затухания полосового фильтра, составленного из фильтров верхних и нижних частот
Подобные полосовые фильтры можно получить последовательным соединением Т – образных (рис.4.16), или П – образных (рис.4.17) фильтров. Однако чаще на практике используют в качестве элементов полосовых фильтров колебательные контуры (рис.4.18).

Рис. 4. 16. Т – образный полосовой фильтр
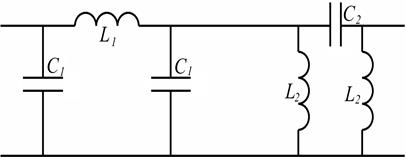
Рис. 4.17. П – образный полосовой фильтр
|
|
|
Для токов с частотами, близкими к резонансной частоте, последовательный контур представляет малое, а параллельный весьма большое сопротивление. Поэтому эти токи почти беспрепятственно проходит через фильтр. Для токов же, частоты которых сильно отличаются от резонансной, последовательный контур представляет значительное, а параллельный весьма малое реактивное сопротивление, вследствие чего токи не проходят через фильтр.
Одиночные контуры не обладают достаточно однородными свойствами в широком диапазоне частот, поэтому в тех случаях, когда важно получить особенно широкую полосу и постоянную степень передачи внутри нее, используют фильтры в виде систем связанных контуров. Широкая полоса пропускания и равномерное воздействие на пропускаемые токи обеспечивается сильной связью или расстройкой контуров одного относительно другого с использованием достаточно большого числа контуров в фильтре.

Рис. 4.18. Схемы полосовых фильтров, составленных из колебательных контуров: а) П – образный; б) Т – образный
Часто приходится решать обратную задачу: не пропускать через фильтр токи определенной полосы частот. Очевидно, что такой заградительный фильтр может быть получен из полосового фильтра простой переменой мест элементов, включенных последовательно и параллельно источнику (рис.4.19). Характеристика затухания заградительного фильтра приведена на рис.4.20.

Рис. 4.19. Схемы заградительных фильтров: а) Т – образный
б) П – образный

Рис. 4.20. Частотная характеристика заградительного фильтра
4.5. Контрольные вопросы
1. Перечислите основные параметры частотной характеристики фильтра
2. Опишите принцип фильтрации постоянного и переменного токов в Г, П и Т образных фильтрах.
3. Чем определяется расхождение реальной характеристики фильтра НЧ от идеальной?
4. Запишите выражение для волнового сопротивления и частоты среза НЧ фильтра.
5. Приведите Г, П и Т образные схемы фильтров верхних частот.
6. Как выглядит характеристика затухания для фильтра верхних частот?
|
|
|
7. Запишите формулы для расчета элементов фильтра верхних частот.
8. Приведите П и Т образные схемы полосовых фильтров.
9. Приведите П и Т образные схемы заградительных фильтров.
5. Дискретизация и восстановление измерительных сигналов
Точная передача информации непрерывными сигналами невозможна из-за искажений и шумов в измерительном канале, из-за ограниченной разрешающей способности и погрешности самих устройств преобразования сигнала. Преобразование аналогового сигнала в дискретный уменьшает его избыточность, повышает помехоустойчивость; дискретный сигнал имеет массу преимуществ при передаче, хранении и обработке информации. Развитие измерительных технологий неразрывно связано с широким внедрением средств цифровой измерительной техники. Процесс измерения и передачи информации по измерительному каналу в таких устройствах связаны с операциями квантования измеряемой величины по уровню и дискретизацией по времени.
Большинство физических сигналов являются аналоговыми. Источниками аналоговых сигналов, как правило, являются физические процессы и явления, непрерывные в динамике своего развития во времени, в пространстве или по любой другой независимой переменной. При аналоговом представлении сигналов величина Х(t) может принимать непрерывный ряд значений как по амплитуде (уровню), так и по времени (рис. 5.1,а). В измерительной технике такими сигналами являются постоянные и переменные токи и напряжения.
Дискретное представление непрерывной функции Х(t) осуществляется:
1) заменой мгновенных значений по амплитуде ограниченным множеством разрешенных уровней. Такие сигналы называют дискретно-непрерывными или квантованными по уровню (рис. 5.1,б);
2) заменой Х(t) мгновенными значениями в фиксированные моменты времени. Такой сигнал называется дискретным, а операция перевода непрерывного сигнала в дискретный – дискретизацией (рис. 5.1,в).
3) одновременной дискретизацией и квантованием. Такой сигнал принято называть цифровым. Теоретической моделью такого сигнала (рис. 1.5,г) является дискретная последовательность XД КВ (ti) значений непрерывного сигнала, принимающая только разрешенные уровни Хi в определенные дискретные моменты времени ti.
Рис. 5.1. графическая модель сигала Х(t): а) непрерывный сигнал; б) дискретно-непрерывный сигнал; в) дискретный сигнал; г) цифровой сигнал.
5.1. Квантование по уровню
Дискретное представление сигналов по уровню (амплитуде) называется квантованием. При квантовании:
ü вся область возможных значений аналогового сигнала разбивается на конечное число уровней квантования;
ü каждому уровню присваивается определенный индекс (порядковый номер в определенной системе счисления);
ü значение аналогового сигнала внутри интервала квантования, заменяется ближайшим разрешенным уровнем квантования.
При большом числе уровней квантования применяется равномерное квантование с постоянным шагом квантования q.
Квантование по уровню может осуществляться двумя способами:
1) при первом способе мгновенное значение функции x(t) заменяется меньшим дискретным значением. В результате квантования непрерывной функции x(t) образуется ступенчатая функция xq(t), которая располагается под кривой x(t) рис. 5.2,а);
2) при втором способе квантования мгновенное значение функции заменяется ближайшим меньшим или большим уровнем квантования в зависимости от того, какой из этих уровней ближе к мгновенному значению функции. В этом случае переход ступенчатой функции с одного уровня на другой происходит в точке максимальной неопределенности сигнала, т.е. в те моменты, когда значение функции находится в середине интервала квантования. Из рис. 5.3,а) видно, что квантованная ступенчатая функция как бы обходит с двух сторон непрерывную функцию x(t).
Методическая погрешность, обусловленная заменой действительного мгновенного значения функции x(t) ее дискретным значением имеет случайный характер и ее абсолютное значение в каждый момент времени определяется разностью между квантованным значением xq(t) и действительным мгновенным значением x(t) функции
dq(t) = xq(t) – x(t). (5.1)
На рис. 5.2,б) показан характер изменения абсолютного значения погрешности для первого способа квантования. В этом случае абсолютная погрешность квантования всегда отрицательная и находится в диапазоне от 0 до – ∆q. Закон распределения этой погрешности зависит от закона распределения x(t).

Рис. 5.2. Первый способ квантования сигнала по уровню

Рис.5.3. Второй способ квантования сигнала по уровню
Математическое ожидание и дисперсия будут зависеть от закона распределения сигнала x(t), числа интервалов квантования N и шага квантования q. При большом числе уровней квантования N, все значения погрешности dq(t) в одном интервале квантования можно считать равновероятными. Тогда плотность вероятности ошибки квантования
P (dк) = 1/∆q. (5.2)
|
|
|
|
|
Дата добавления: 2017-01-14; Просмотров: 1734; Нарушение авторских прав?; Мы поможем в написании вашей работы!