КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основные понятия. Візитка з її графічними ефектами (взяти багатонаповнену)
|
|
|
|
ПРИКЛАД
Візитка з її графічними ефектами (взяти багатонаповнену)
ТЕХНОЛОГІЇ тривимірної графіки для WEB: VRML
VRML (Virtual Reality Modeling Language) - мова моделювання віртуальної
реальності, вже досить давно застосовується в мережі Інтернет. Він визнаний Web
3D-консорціумом (www.web3d.org) для опису інтерактивної тривимірної графіки
і мультимедійних додатків і стандартизований. VRML-документ являє собою
звичайний текстовий файл, який містить описи тривимірних фігур і властивостей
їх поверхонь (колір, текстура матеріалу, освітлення і т.п.). Такий документ
надходить в браузер у вигляді вихідного тексту, точно так само, як і звичайний
HTML-документ. Браузер, який отримує VRML-документ, повинен вміти інтерпретувати
VRML-код.
Мова VRML був вперше запропонований Марком Песке (Mark Pesce) в 1993 році, а
його перша специфікація (VRML 1.0) була підготовлена на основі формату Open
Inventor фірми SGI і вперше представлена на другій конференції WWW у жовтні
1994 року. Подальший розвиток проходило вже не тільки на основі розробок
фірми SGI; до створення формату підключилися такі фірми, як Sony Research,
Mitra, і багато інших. У другому випуску формату (VRML 2.0) його інтерактивні
можливості були значно розширені. Стандарт VRML 2.0 підтримує анімацію
і звукові ефекти; для нього існує підтримка на рівні мов Java і
JavaScript. VRML 2.0 було розглянуто відкритої дискусійною групою і схвалений
багатьма компаніями, а в серпні 1996 року був прийнятий його стандарт. У грудні
1997 VRML 2.0 був офіційно замінений на VRML 97, який був вперше
представлений в лютому 1997 року в Монтереї (Каліфорнія, США). Новий стандарт
практично ідентичний специфікаціям VRML 2.0, з урахуванням редакційних поправок
і деяких незначних функціональних відмінностей. Таким чином, поточним
VRML-стандартом сьогодні є VRML 97, а в роботі знаходиться новий формат
- VRML 200x. Опис мови можна знайти на Web-сайті Web3D Consortium або по
адресою: www.vrml.org. Проте засоби і методи представлення 3D-графіки в
Інтернет продовжують постійно розвиватися і вже не обмежуються тільки
мовою VRML.
Направляющие косинусы внешней нормали к площадке, решение системы линейных однородных алгебраических уравнений (СЛОАУ), вычисление определителя третьего порядка, главные напряжения и главные площадки, инварианты напряженного состояния, экстремальные касательные напряжения, деформированное состояние в точке, главные деформации.
5.1 Главные напряжения и главные площадки
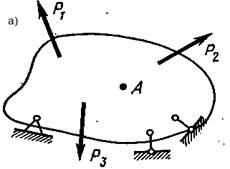
Рассмотрим некоторое тело, нагруженное системой сил, удовлетворяющей условиям равновесия (рис. 5.1 а). Тремя парами параллельных плоскостей выделим в окрестности точки А элементарный параллелепипед (рис. 5.1 б).
| 
|
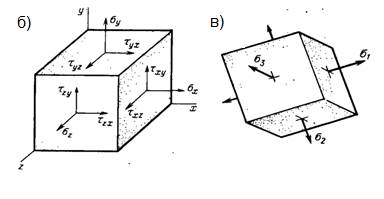
Рис. 5.1 Объемное напряженное состояние (а). Главные площадки (б)
Напряжения, действующие на гранях элементарного параллелепипеда в общем случае объемного напряженного состояния (рис. 5.1 б), сведем в матрицу (тензор напряжений)
| (5.1) |
Если записать уравнения равновесия параллелепипеда: сумма моментов всех сил относительно осей x,y,z, то получим численные равенства закона парности касательных напряжений:
 , ,  , , 
| (5.2) |
В двух взаимно перпендикулярных площадках составляющие касательных напряжений, перпендикулярные общему ребру, равны друг другу и направлены обе либо к общему ребру, либо от ребра. Поэтому матрица симметрична. Меняя ориентировку параллелепипеда (рис. 5.1 в), можно найти такое его положение, когда на всех гранях касательные напряжения будут равны нулю. Такие площадки и действующие на них нормальные напряжения называются главными напряжениями и главными площа дками.
симметрична. Меняя ориентировку параллелепипеда (рис. 5.1 в), можно найти такое его положение, когда на всех гранях касательные напряжения будут равны нулю. Такие площадки и действующие на них нормальные напряжения называются главными напряжениями и главными площа дками.
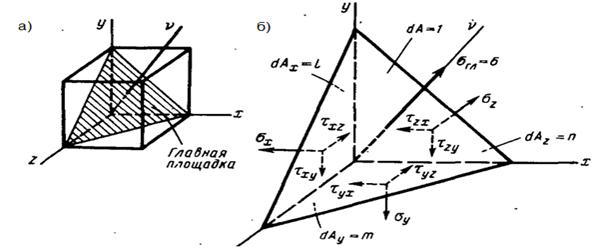
Рассмотрим способ их определения. Предположим, что нам известен наклон какой-либо главной площадки, определяемой нормалью γ (рис.5.2 а). Направляющие косинусы нормали:

| 
| 
| 
| (5.3) |
Сечением, параллельным этой площадке, выделим из исходного параллелепипеда тетраэдр (рис 5.2 б).
|
Рис. 5.2 Наклонная площадка (а) и равновесие тетраэдра, выделенного главной площадкой (б)
Примем площадь наклонной грани тетраэдра dA=1, тогда площади других граней будут равны:

| 
| 
| 
| (5.4) |
Напряжение, действующее на главной площадке, обозначим σгл=σ. Составим условия равновесия тетраэдра в виде суммы проекций действующих на него сил на ось x:

| (5.5) |
Аналогичные уравнения будут для осей y,z. Все вместе запишем эти уравнения в виде системы линейных однородных алгебраических уравнений (СЛОАУ) относительно неизвестных направляющих косинусов  :
:



| (5.6) |
Решение СЛОАУ  нам не подходит, т.к. должно выполняться условие (5.3): .
нам не подходит, т.к. должно выполняться условие (5.3): .
Поэтому найдем решение (5.6) отличное от нуля. Для этого, потребуем чтобы определитель системы равнялся нулю, т.е.
| (5.7) |
Раскрываем определитель (5.7) получаем:

| (5.8) |
Из симметрии матрицы определителя (5.6) следует, что все три корня уравнения (5.8) будут действительные числа:
| (5.9) |
 Коэффициенты уравнения (5.8) с учетом закона парности касательных напряжений (5.2) вычисляются по формулам:
Коэффициенты уравнения (5.8) с учетом закона парности касательных напряжений (5.2) вычисляются по формулам:
| (5.10) |
Коэффициенты (5.10) не зависят от выбора осей координат, так как при любых исходных площадках уравнение (5.8) должно давать одни и те же корни: 
 Поэтому величины
Поэтому величины  называются первым, вторым и третьим инвариантами напряженного состояния (тензора напряжений).
называются первым, вторым и третьим инвариантами напряженного состояния (тензора напряжений).
Для определения  , соответствующих одному из трех главных напряжений, значение этого напряжения надо подставить в уравнение (5.6) вместо σ. Совместное решение (5.6) и (5.3) даст искомые направляющие косинусы.
, соответствующих одному из трех главных напряжений, значение этого напряжения надо подставить в уравнение (5.6) вместо σ. Совместное решение (5.6) и (5.3) даст искомые направляющие косинусы.
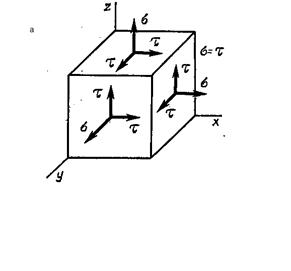
Пример 5.1 Предположим, что рассматривая напряженное состояние в точке, мы выделили в ее окрестности элементарный параллелепипед и на его гранях обнаружили систему нормальных и касательных напряжений, обладающих тем свойством, что все компоненты оказались равными друг другу τ (рис. 5.3 а). Определим главные напряжения и установим, что же это за напряженное состояние.
| 
|
Рис. 5.3 Напряжения на гранях параллелепипеда (а). Выделение элементарного параллелепипеда исходного состояния (б)
Вычислим инварианты по формулам(5.10), уравнение (5.8) примет вид, корни которого равны:

|  
| 
|
Таким образом, на рис 5.3 а представлено одноосное напряженное состояние с напряжением  (Рис 5.3 б). На рис 5.3 б показана тройка взаимно перпендикулярных секущих площадок имеющих равный наклон к оси растянутого стержня.
(Рис 5.3 б). На рис 5.3 б показана тройка взаимно перпендикулярных секущих площадок имеющих равный наклон к оси растянутого стержня.
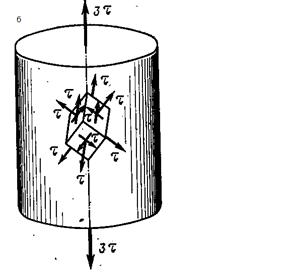
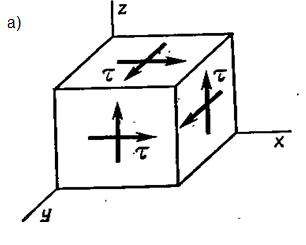
Пример 5.2 Предположим, что рассматривая напряженное состояние в точке, мы выделили в ее окрестности элементарный параллелепипед и на его гранях обнаружили систему только равных касательных напряжений τ.
| 
|
Рис. 5.4 Напряженное состояние в точке (а), главные площадки исходного состояния (б)
Вычислим инварианты по формулам(5.10), уравнение (5.8) примет вид, корни которого равны:

| 
| 
|
Следовательно, рассматриваемое состояние является трехосным (рис. 5.4 б).
Если площадки элементарного параллелепипеда, выделенного в окрестности точки, являются главными, то для инвариантов напряженного состояния имеем следующие формулы:

| 
| 
| (5.11) |
5.2 Площадки экстремальных касательных напряжений.
Максимальное касательное напряжение для данной точки равно полуразности максимального и минимального главных напряжений и действует на площадке, наклоненной к ним под углом 450 ( ).
).
| 
| 
| (5.12) |
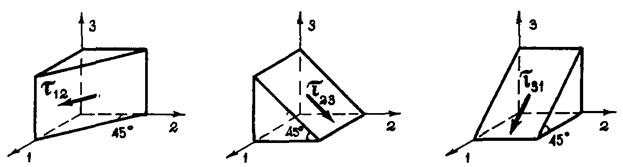
Рис 5.5. Площадки экстремальных касательных напряжений (оси 1,2,3 параллельны главным напряжениям )
5.3 Деформированное состояние в точке
Рассмотрим особенности деформирования материала в окрестности точки М деформированного тела (рис.5.6). Выделим элемент dx*dy*dz в этой точке
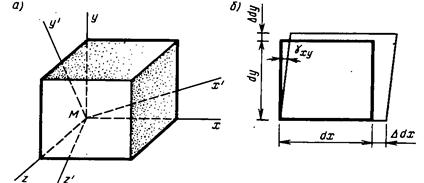
Рис. 5.6 Совокупность деформаций для всевозможных осей, проведенных через точку М, представляет деформированное состояние в точке (а); деформации элемента в плоскости x-y (б)
Деформации элемента в трех ортогональных плоскостях представим в виде тензора деформаций (см. 1.4):
| (5.13) |
Если мысленно вращать вокруг точки М оси x, y, z, переводя их во всевозможные положения  ,то деформации (5.13) будут непрерывно изменяться (рис. 5.6 а).
,то деформации (5.13) будут непрерывно изменяться (рис. 5.6 а).
Совокупность относительных удлинений и углов сдвига для всевозможных направлений осей, проведенных через данную точку, называется деформированным состоянием в точке.
Деформации  в направлениях, для которых отсутствуют углы сдвига, называются главными деформациями в точке и определяются по формулам:
в направлениях, для которых отсутствуют углы сдвига, называются главными деформациями в точке и определяются по формулам:
| 
| 
| (5.14) |
|
|
|
|
Дата добавления: 2014-01-15; Просмотров: 429; Нарушение авторских прав?; Мы поможем в написании вашей работы!