КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Система механического управления вертолета
|
|
|
|
Процесс изменения сил и моментов, обеспечивающих полет вертолета по заданной траектории, называют управлением, а комплекс соответствующих устройств составляет систему управления (СУ) (рис. 3.1.1).
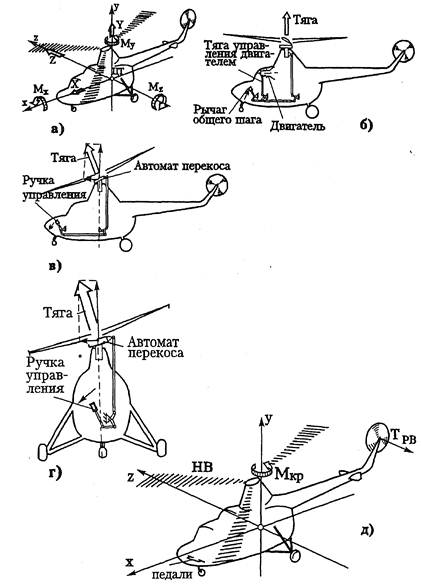
Рис. 3.1.1. Управление вертолета: а – система осей вертолета; б – управление общим шагом; в – продольное управление; г – поперечное управление; д – путевое управление.
Управление вертолетом может осуществляться:
– непосредственно летчиком;
– летчиком, а также механизмами и устройствами, служащими для облегчения процесса управления и улучшения его качества (полуавтоматическая система);
– системой, в которой создание и изменение управляющих сил и моментов осуществляется комплексом автоматических устройств, а роль летчика сводится к отладке этих устройств и наблюдению за правильностью их работы.
СУ вертолетом состоит из ручного и ножного управления.
Ручное управление предназначено для воздействия на автомат перекоса (АП) НВ и разделяется на управление общим шагом (управление подъемной силой НВ по оси У) и циклическим шагом НВ (продольное и поперечное управление относительно осей X и Z).
Управление общим шагом летчик осуществляет при помощи рычага, расположенного слева от него. Управление циклическим шагом НВ производится правой рукой.
Ножным управлением создается момент М относительно вертикальной оси вертолета и осуществляется путевое управление (рысканье). На вертолете одновинтовой схемы путевое управление предназначено для изменения общего шага РВ, на вертолетах соосной схемы – для дифференциального изменения общего шага НВ.
Движение рук и ног летчика при управлении вертолетом соответствует естественным рефлексам человека. При перемещении ручки вперед, т.е. от себя, вертолет опускает нос (появляется пикирующий момент тангажа Мг относительно оси Z) и увеличивает горизонтальную скорость полета Vх при повышении мощности двигателя.
При движении ручки назад, т.е. на себя, появляется кабрирующий момент Мz и происходит соответствующее движение вертолета назад (вперед хвостом).
Движение ручки влево вызывает левый крен вертолета (относительно оси X) и при увеличении мощности двигателя – полет боком влево вдоль оси Z. Движение ручки вправо вызывает правый крен и полет боком вправо.
Движением левой ноги вперед вертолет поворачивается налево, правой ноги – направо.
ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К СИСТЕМЕ УПРАВЛЕНИЯ ВЕРТОЛЕТА
Выбор той или иной системы управления или их сочетания зависит от специфических особенностей вертолетов.
Основной задачей конструктора является создание такой СУ, которая наиболее точно осуществляет кинематическую связь между командными рычагами и органами управления. Эта задача значительно усложняется при увеличении полетной массы вертолета из-за роста нагрузок на органы управления, а также вследствие увеличения расстояния между командными рычагами и органами управления.
Летчик в общем случае решает две по существу различные задачи: одна из них – стабилизация положения вертолета в пространстве; вторая – управление траекторией полета вертолета. Наиболее эффективным средством улучшения устойчивости вертолета с шарнирным НВ является система автоматической стабилизации, называемая автопилотом.
Включение автопилота в СУ вертолета производится по т.н. дифференциальной схеме (рис. 3.1.2).
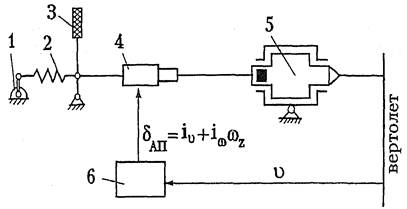
Рис. 3.1.2. Включение автопилота в систему управления по дифференциальной схеме: 1 – муфта автотриммера; 2 – загрузочная пружина; 3 – ручка управления;
4 – раздвижная тяга; 5 – силовой цилиндр; 6 – автопилот.
В этой схеме применяются рулевые приводы, работающие одновременно как от сигналов автопилота, так и от воздействия летчика. При дифференциальном включении рулевых машин рычаг управления, например, ручка, может быть неподвижным (или перемещаться летчиком), в то время как соответствующий орган управления независимо от ручки отклоняется под воздействием сигналов автопилота, но его максимально возможное отклонение обычно ограничено диапазоном шириной около 20% полного хода.
В то же время для быстрого изменения режима полета или при отказе автопилота летчик всегда может вмешиваться в управление, непосредственно отклоняя ручку управления. Дифференциальное включение автопилота обеспечивает устойчивость вертолета на всех режимах в течение всего времени полета.
Вертолеты, управление которыми невозможно или затруднительно без применения гидроусилителей (ГУ) или бустеров, должны иметь, кроме основной гидравлической системы, дублирующую. На вертолетах, управление которыми возможно без усилительных механизмов, допускается установка только основной усилительной системы.
ГУ состоит из исполнительного механизма (силового привода), следящего элемента (золотника) и связи между ними (рис. 3.1.3).
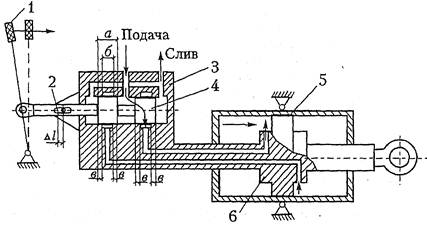
Рис. 3.1.3. Принципиальная схема работы гидроусилителя:
1 – ручка управления; 2 – ограничитель хода золотника; 3 – головка ГУ; 4 – золотник; 5 – силовой цилиндр; 6 – поршень силового штока.
При нейтральном положении золотника гидросмесь не поступает в силовой цилиндр и система остается неподвижной. Если сдвинуть золотник, то одна из полостей цилиндра соединяется с питающей магистралью гидросистемы, а другая – со сливной. Под действием разности давлений в полостях шток силового цилиндра начнет перемещаться, поворачивая лопасть относительно осевого шарнира. Одновременно со штоком в ту же сторону будет перемещаться и корпус золотника (через механическую обратную связь), стремясь снова перекрыть питающую и сливную магистрали. Если летчик или автопилот перестанут смещать золотник – он остановится. Таким образом, каждому положению тяги управления золотником, а следовательно, и ручки управления, связанной с ним, соответствует свое положение исполнительного штока.
На вертолетах по всех каналах применяют необратимую бустерную систему управления. Усилия, возникающие в проводке управления от шарнирных моментов на органах управления, не передаются на рычаги управления вертолетом, т.к. целиком воспринимаются ГУ. Для имитации усилий от органов управления в систему включаются загрузочные механизмы. В этом случае пилот преодолевает усилие не от шарнирных моментов лопастей, а от сжатия или растяжения пружины загрузочного механизма (рис. 3.1.4). К загрузочному устройству присоединяется т.н. механизм триммерного эффекта. При включении этого механизма снимается (по желанию пилота при длительном полете) усилие с ручки (педали).
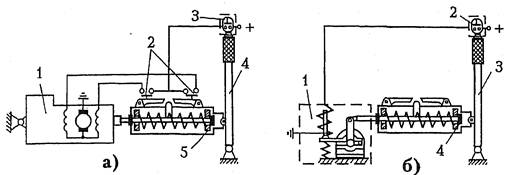
Рис. 3.1.4. Схемы «автотриммирования»:
а – схема «автотриммирования» с применением электромеханизма: 1 – электромеханизм с самотормозящейся червячной парой; 2 – концевые выключатели;
3 – триммерная кнопка; 4 – ручка управления; 5 – пружинный механизм;
б – схема «автотриммирования» с применением электромагнитной муфты:
1 – электромагнитная муфта; 2 – триммерная кнопка; 3 – ручка управления; 4 – пружинный механизм.
Люфты в управлении неблагоприятно влияют на управляемость вертолета. Если имеется люфт на участке между ручкой и золотником ГУ, то после страгивания ручки золотник переместится лишь после выбора люфта. При наличии люфта между ручкой и загрузочным механизмом летчик ощутит усилие от последнего уже после начала поворота лопастей и реагирования вертолета. Это нарушение чувства управления может вызвать раскачку вертолета.
Появление чрезмерного суммарного люфта в проводке управления может привести к самопроизвольному перемещению управляющих золотников и включению ГУ.
В СУ вертолета должна быть обеспечена независимость действия продольного, поперечного, путевого управления и общего шага НВ.
Рекомендуется не превышать следующих значений отклонения рычагов управления:
±170 мм – для продольного отклонения ручки;
± 125 мм – для поперечного отклонения ручки;
± 100 мм – для отклонения педалей.
В системах прямого управления летчику приходится преодолевать не только шарнирный момент от лопастей НВ и РВ, но и трение во всех шарнирных узлах системы. При необратимом бустерном управлении летчик преодолевает усилия трения в узлах управления, установленных до золотника, и усилие трения в золотнике. Рекомендуется, чтобы усилия на органах управления, потребные для преодоления сил трения в системе управления, не превышали величин, указанных в табл. 3.1
Таблица 3.1.1
| Канал управления | Усилия трения, Н | |
| mmax взл < 5т | 5т < mmax взл ≤ 15т | |
| Продольный | 5...7 | 10...15 |
| Поперечный | 3...5 | 7...10 |
| Путевой | 15...20 | 30...40 |
Для вертолетов максимальной взлетной массой более 15т допускаются несколько большие значения сил трения (до 25—30%) при максимальных усилиях на ручке управления и педалях в случаях полного их отклонения от среднего положения при нейтральном положении триммера.
Для облегчения пилотирования должно обеспечиваться самоцентрирование рычагов продольного и поперечного управления. Величина предварительной затяжки пружины загрузочного механизма должна превышать усилие трения примерно на 20%.
Усилия на рычаг продольного управления при выполнении установившихся и переходных режимов в случаях отказа двигателя, основной гидросистемы, автопилота и триммера не должны превышать более чем на на 30% рекомендуемые значения максимальных усилий (табл. 3.2).
Таблица 3.1.2
| Величина усилия, Н | Максимальная взлетная масса, т | ||||
| Рв |
Максимальные усилия в поперечном и путевом каналах определяются соотношениями
Рх = (0,5 – 0,7) Рв
Рп = (2,0 – 2,5) Рв.
Деформация фюзеляжа и других частей вертолета, по которым идет проводка управления, не должна вызывать дополнительных усилий на ручке и педалях.
Из-за упругости фюзеляжа появляется возможность возникновения недопустимых автоколебаний в системе механическая проводка – золотник – гидроусилитель – упругий фюзеляж. Возможное изменение установочных углов лопастей при деформации конструкции должно давать демпфирующие аэродинамические силы на НВ.
Ручка управления, педали и рычаг общего шага должны иметь ограничители своих отклонений. Ограничители ставятся непосредственно на органах управления, если в СУ нет ГУ, или на ГУ.
Минимальная жесткость проводки управления должна определяться из условия обеспечения безопасности от флаттера лопасти НВ и РВ и подвижного оперения, а также из условия отсутствия опасных в отношении прочности вибраций в самой проводке управления.
Углы отклонения командных рычагов управления должны иметь запас, т.е. быть больше, чем требуется по расчету или экспериментальным данным.
Все рычаги и тяги управления в кабинете должны быть расположены таким образом и иметь такую форму, чтобы не стеснять движения летчика при работе, не мешать ему входить в кабину и покидать ее. Педали ножного управления в кабине должны допускать регулировку под рост летчика, кроме того необходимо обеспечить удобство осмотра, монтажа и демонтажа деталей и агрегатов управления.
Каждая деталь СУ должна быть спроектирована таким образом, чтобы предотвратить заклинивание, истирание и задевание вследствие воздействий груза, пассажиров, незакрепленных предметов или замерзания влаги.
Рис. 4.1. Автожир. Рис. 4.2. Вертоліт одногвинтової схеми з хвостовим гвинтом.
Рис. 4.3. Одногвинтової гвинтокрил. Рис. 4.4. Конвертоплан.

Вертоліт Карно.
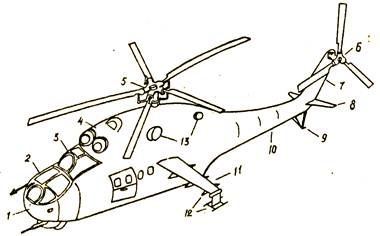
Рис. 4.5. Схема вертольота с одним НВ і одним РВ:
1 – фюзеляж; 2, 3 – лобове скло кабіни; 4 – силова установка; 5 – несучий гвинт; 6 – рульовий гвинт;
7 – кільова балка (кіль); 8 – стабілізатор; 9 – хвостова опора; 10 – хвостова балка; 11 – шасі; 12 – крило з вузлами підвіски вантажів; 13 – вихідні пристрої основного двигуна і двигуна допоміжної силової установки.
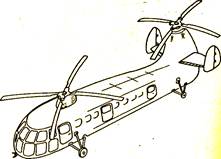
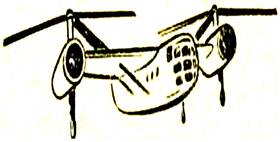
Рис. 4.6. Вертоліт з двогвинтовий Рис. 4.7. Вертоліт з двогвинтовий
поздовжньою схемою розташування НГ. поперечною схемою розташування НГ.


Рис. 4.8. Співвісна схема вертол. с двома НГ. Рис. 4.9. Кут установки лопаті гвинта вертольота.

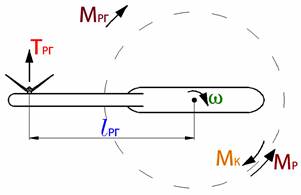
Рис. 4.10. Поднімальна сила лопаті Рис. 4.11. Моменты, що діють на вертоліт.
гвинта вертольота.
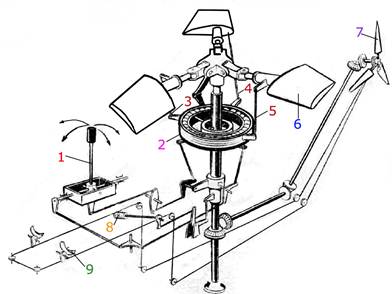
Рис. 4.12. Система керування одногвинтовим вертольотом:
1 - ручка керування; 2 - зовнішнє кільце автомата перекосу; 3, 4, 5 - тяги (повідці);
6 - лопать НГ; 7 - лопать РГ; 8 - важіль загального кроку (крок - газ); 9 - ножні педалі.
Колонка поздовжньо-поперечного керування вертольотом Мі – 8
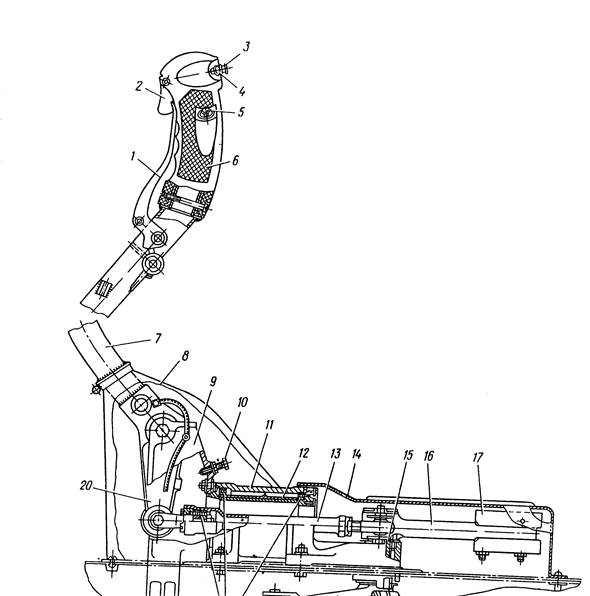
Колонка поздовжньо-поперечного керування:
1 – важіль керування гальмами коліс шасі; 2 – колонка послідовного включення СПУ і радіо; 3 – кнопка виключення автопілоту; 4 – кнопка спецпризначення; 5 – кнопка включення ЭМТ-2М; 6 – рукоятка; 7 – труба ручки; 8 – чохол; 9 – корпус; 10 – регулювальний гвинт; 11 – кронштейн; 12 – стакан; 13 – шарнірна тяга; 14 – кожух;
15 – вісь; 16, 18 – качалки; 17 – балансувальний вантаж; 19 – підшипники; 20 – важіль.
Педалі шляхового керування вертольотом Мі – 8
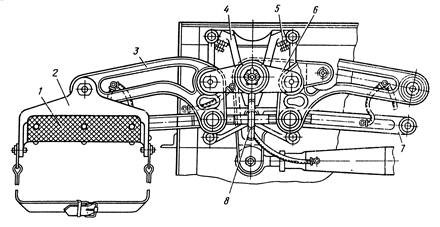
Педалі шляхового керування:
1 – гашетка; 2 – підніжка; 3 – кутовий важіль; 4 – основа; 5 – гвинтовий упор;
6 – кронштейн; 7 – важіль, що вирівнює; 8 – регулювальний гвинт з маховиком.
|
|
|
|
Дата добавления: 2014-01-15; Просмотров: 6580; Нарушение авторских прав?; Мы поможем в написании вашей работы!