КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основные элементы лазерных сканирующих устройств
|
|
|
|
Структура и принцип работы лазерных фотонаборных автоматов
ФНА структурно можно разделить на управляющие и лазерные сканирующие устройства.
Управляющее устройство осуществляет ввод информации об изображении полосы или полноформатного печатного листа издания в виде матрицы экспонирования и формирует сигналы управления исполнительными устройствами и механизмами сканирующего устройства. Эти сигналы управляют модуляцией лазерного луча, разверткой изображения при экспонировании фотографического материала, перемещением материала, контролируют синхронную работу исполнительных устройств.
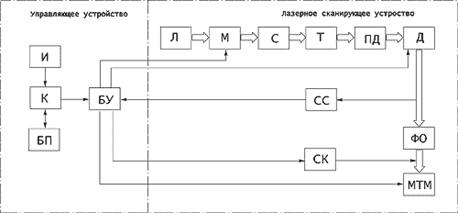 |
Рисунок 8.1 – Структурная схема ФНА
Управляющее устройство состоит из интерфейса (И), осуществляющего прием цифровых данных матрицы экспонирования от растрового процессора системы допечатной подготовки изданий; основного контроллера (К), организующего работу всех электронных и электромеханических узлов автомата; блока памяти (БП) для хранения данных настройки лазерного выводного устройства на определенный режим работы и промежуточного хранения информации об изображении в процессе его записи; блока управления (БУ), который непосредственно вырабатывает сигналы управления исполнительными механизмами и системами.
Первые лазерные ФНА автоматы имели управляющее устройство, осуществлявшее обработку текстовой, иллюстрационной и шрифтовой информации для получения цифровой информации об изображении сверстанной полосы издания или ее фрагмента (например, блока или гранки текста) в растрированной форме.
В качестве устройств ввода информации использовались накопители на гибких магнитных дисках, а также устройства сопряжения с каналом связи для организации работы ФНА в линию с ЭВМ системы обработки текста и иллюстраций.
Основой управляющего устройства этих лазерных ФНА служил персональный компьютер, который выполнял обработку текста и шрифтовой информации, в том числе формирование строк заданного формата с расчетом их выключки, верстку полос, масштабирование шрифтовых знаков из базового кегля в кегль набора, трансформацию знаков для получения выделительных начертаний и т.п.
Для хранения информации о начертании большого количества знаков, иллюстраций, текста, программ обработки текста требуются значительные объемы памяти. Поэтому лазерные ФНА автоматы оснащались запоминающими устройствами на жестких магнитных дисках.
С развитием вычислительной техники появились аппаратно-программные и программные быстродействующие растровые процессоры, с высокой скоростью выполняющие преобразование текста, графики и растрированных полутоновых иллюстраций в матрицу экспонирования. Функции же по обработке текстовой информации и ее хранению сегодня полностью переданы рабочим станциям системы допечатной подготовки изданий.
Лазерное сканирующее устройство (ЛСУ) представляет собой сложный комплекс оптико-механических узлов, объединенных электронными блоками управления. В общем случае лазерное сканирующее устройство состоит из лазера (Л) с блоком питания, модулятора (М) лазерного излучения, телескопа (Т), дефлектора (Д), фокусирующего объектива (ФО), механизма транспортирования материала (МТМ), систем синхронизации процесса сканирования (СС) и коррекции пространственного положения лазерного луча (СК).
На вход лазерных сканирующих устройств подаются электрические сигналы из управляющего устройства. В результате сканирования на выходе получают изображение полосы, ее фрагмента или полноформатного оттиска, зарегистрированных на фотоматериале.
В состав лазерных сканирующих устройств также могут входить светофильтры (С), полевые диафрагмы (ПД), поворотные полупрозрачные или полностью отражающие зеркала и призмы, бленды и другие элементы. По принципу действия и конструктивному исполнению лазеры, модуляторы, дефлекторы, системы синхронизации и коррекции, а текже оптические элементы, в зависимости от назначения, схемы построения и требований, предъявляемых к сканирующему устройству, могут быть различными.
Лазеры в выводных устройствах служат источниками света. Они отличаются высокой монохроматичностью и когерентностью излучения, малой расходимостью пучка, большой интенсивностью световой энергии в пучке. Эти особенности лазеров позволяют сфокусировать световой пучок в пятно очень малых размеров с высокой плотностью энергии.
В ФНА используются газовые и полупроводниковые лазеры – лазерные диоды. Из полупроводниковых лазеров в современных ФНА используются лазерные диоды инфракрасного и видимого красного излучений (длина волны соответственно 780 и 670…680 нм). В качестве газовых применяются аргон-ионные (Аг+) и гелий-неоновые (Не-Nе) лазеры, которые работают на довольно короткой длине волны – 488 и 633 (650) нм соответственно. Чем меньше длина волны, тем более четкое пятно на фотоматериале можно получить во время записи. Такие пятна изображения, в которых оптическая плотность на краях очень резко изменяется от максимального значения до минимального, называют жесткими, а пятна с более плавным изменением оптической плотности на краях – мягкими.
Использование газовых коротковолновых лазеров наряду с положительными имеет и отрицательные стороны. Например, значительно усложняется конструкция ФНА, поскольку необходима специальная система охлаждения устройства. Это, в свою очередь, резко увеличивает цену ФНА.
Модулятор предназначен для управления интенсивностью лазерного луча по принципу «да – нет». В лазерных выводных устройствах применяются электрооптические (ЭОМ) и акустооптические (АОМ) модуляторы, которые под действием электрических сигналов открывают или закрывают путь для прохождения лазерного луча. Максимальная частота переключения модулятора с одного состояния в другое достигает 100 МГц для электрооптических и 10 МГц для акустооптических модуляторов.
Принцип работы ЭОМ основан на линейном электрооптическом эффекте. При воздействии на электрооптический кристалл электрического поля в результате двойного лучепреломления изменяется направление поляризации прошедшей через кристалл световой волны. Если электрооптические кристаллы поместить между поляризаторами с ортогонально направленными осями поляризации и на вход этой системы направить лазерный пучок с поляризацией, соответствующей поляризации входного элемента, то при отсутствии напряжения на электродах кристаллов световой поток на выходе второго поляризатора (анализатора) тоже будет отсутствовать. При подаче на электроды управляющего напряжения возникнет выходной световой поток, интенсивность которого достигает максимума при некотором значении этого напряжения, называемого полуволновым. Таким образом, изменяя напряжение, подаваемое на электроды, можно осуществлять модуляцию светового потока. Время переключения электрооптического модулятора из одного состояния в другое может составлять всего 10–8 с и менее. Для переключения ЭОМ требуется высокое управляющее напряжение, превышающее 100 В. К недостаткам ЭОМ, помимо использования высокого управляющего напряжения, следует отнести зависимость параметров от температуры и низкий коэффициент контрастности (порядка 100), представляющий собой отношение между максимальной и минимальной световой мощностью излучения, которое проходит через модулятор. В последнее время модуляторы этого типа уступают место акустооптическим.
Принцип действия АОМ основан на дифракции поляризованного света на бегущей ультразвуковой волне в оптически прозрачном материале. Если на акустопровод, в котором с помощью пьезоэлектрического преобразователя возбуждена бегущая ультразвуковая волна, подать пучок света, то благодаря возникновению участков сжатия и растяжения, различающихся показателем преломления, эта область акустопровода будет действовать на падающий свет как дифракционная решетка. Световой пучок, дифрагируя на решетке, образует несколько выходных пучков – максимумов интенсивности излучения различных порядков, разнесенных в пространстве по направлению.
Особый практический интерес представляет случай, когда свет (лазерный пучок) направляется на кристалл под так называемым углом Брэгга. При этом наблюдается дифракция Брэгга, которая характеризуется тем, что интенсивности всех дифракционных максимумов, кроме первого, становятся пренебрежимо малыми. В процессе модуляции лазерный пучок может или проходить через акустооптический кристалл без изменения направления и интенсивности, или переходить в дифрагированный пучок, преломленный под углом Брэгга.
АОМ работает следующим образом. Луч света I проходит через кристалл и попадает на диафрагму, которая преграждает ему путь. В этом случае модулятор прерывает световой поток. При подаче на кристалл акустической волны с помощью пьезопреобразователя наблюдается явление дифракции, и из кристалла выходит луч света I1. Направление этого луча выбирают так, чтобы оно совпадало с направлением оптической оси системы. Допустимые частоты модуляции для АОМ определяются упругооптическими свойствами акустической среды и временем прохождения акустической волны через апертуру светового луча и достигают 10 МГц.
Основные преимущества АОМ по сравнению с ЭОМ — низкие управляющие напряжения (порядка 10 В), высокий коэффициент контрастности (до 1000), независимость параметров модуляции от температуры, использование неполяризованного света, отсутствие в конструкции модулятора склеек оптических элементов (что существенно уменьшает потери света), возможность работы в режиме модулятора и дефлектора.
Управление пространственным положением лазерного луча при развёртке изображения в виде точечно-растровых строк осуществляют дефлекторы,
Дефлектор является устройством, преобразующим модулированный световой пучок в одномерный растр. Двумерное изображение при этом создается медленной (по оси Y) разверткой, как правило, за счет равномерного перемещения светочувствительного (или почти ортогонально) к линии быстрой одномерной развертки (по оси X).
По типу дефлектора лазерные сканирующие устройства можно разделить на устройства, в которых используются оптико-механические дефлекторы с колеблющимися или вращающимися зеркалами, и на акустооптические дефлекторы. Применение того или иного типа дефлектора в основном определяется схемой построения выводного устройства, а точнее типом развертки изображения при его записи.
Оптико-механическая развертка используется в устройствах с плоскост-ной записью линейных растровых линий на светочувствительном материале, который расположен в плоскости или на наружной образующей поверхности цилиндра, а также с цилиндрической записью на внутреннюю или внешнюю образующие поверхности цилиндра. Разновидностью последней схемы развертки является вариант, в котором отсутствуют дефлекторы. В этом случае материал, расположенный на внешней поверхности барабана, экспонируется матрицей лазеров. При этом развертка по Х осуществляется матрицей лазеров за счет вращения барабана, а по Y — перемещением матрицы лазеров вдоль его оси.
Основными параметрами дефлектора являются максимальный угол отклонения, разрешающая способность и частота сканирования.
Акустооптический дефлектор (АОД) работает следующим образом. Для отклонения луча на разные углы на кристалл пьезопреобразователем подают акустические волны разной частоты. Для последовательного отклонения луча на угол  1, 2,..., m последовательно подают акустические волны с частотой
1, 2,..., m последовательно подают акустические волны с частотой
 1, 2,..., m. При этом угол отклонения луча i линейно связан с частотой акустической волны i:
1, 2,..., m. При этом угол отклонения луча i линейно связан с частотой акустической волны i:
 ,
,
где  3 — скорость звуковой волны;
3 — скорость звуковой волны;  — длина волны света.
— длина волны света.
Акустооптический дефлектор в лазерном сканирующем устройстве может использоваться в качестве многоканального модулятора. Фрагмент схемы такого сканирующего устройства приведен на рис. 8.2. Процессор 1 через промежуточный (согласующий) блок 2 фотонаборного (записывающего) устройства управляет высокочастотным генератором 3 электрического напряжения. В зависимости от уровня управляющего напряжения (на выходе блока 2) генератор формирует выходные сигналы с шестью различными частотами 1 – 6 (в диапазоне 200-250 МГц). Лазерный луч 6, падающий на акустооптическую среду 5, в зависимости от частоты отклоняется дифракционной решеткой 4 дефлектора 7 на различные углы  . Поэтому выходные (дифрагированные) лучи 8 распространяются по различным направлениям (вертикально отклоняются в разной степени). При фокусировке оптических лучей на размещенный на барабане регистрирующий материал с использованием одного акустооптического дефлектора удается получить шесть пишущих пучков лазерного излучения.
. Поэтому выходные (дифрагированные) лучи 8 распространяются по различным направлениям (вертикально отклоняются в разной степени). При фокусировке оптических лучей на размещенный на барабане регистрирующий материал с использованием одного акустооптического дефлектора удается получить шесть пишущих пучков лазерного излучения.
Строчное сканирование при плоскостной записи одновременно по шести параллельным каналам обеспечивается благодаря использованию вращающегося многогранного зеркального дефлектора.
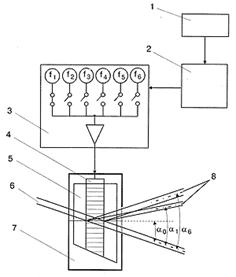 |
Рисунок 8.2 – Акустооптический дефлектор в сканирующем устройстве лазерного ФНА
Известны акустооптические дефлекторы, например MGPD-800-400 фирмы Brimrose (США), у которых 8, 16 или 32 канала управляются частотой 800 МГц.
Существующие сегодня акустооптические дефлекторы имеют разрешение до 2500 точек, частоту сканирования, обеспечивающую скорость записи информации 1 Мбит/с, угол отклонения 5-6°. Из-за невысокого разрешения и малого угла отклонения АОД они обычно используются как дополнительные дефлекторы (например, при субрастровой записи изображения) и в системах коррекции положения лазерного луча для небольших отклонений лазерного луча, компенсирующих неточность сканирующей системы.
Оптико-механические колебательные дефлекторы (рис. 8.3 а) обычно состоят из ротора и укрепленного на нем зеркала, которое помещено в переменное магнитное поле. С ротором жестко связана пружина, создающая вращательный момент. Для записи с постоянной линейной скоростью луча управление дефлектором должно осуществляться напряжением, изменяющимся по определенному, например пилообразному, закону. Известные колеблющиеся дефлекторы обеспечивают угол отклонения до 30° при частоте колебаний в несколько сотен герц. Основной недостаток колеблющихся дефлекторов — относительно низкие скорости сканирования, причем чем больше размер зеркала, тем ниже скорость.
 |
Рисунок 8.3 – Оптико-механические зеркальные дефлекторы
Оптико-механические дефлекторы с вращающимися зеркалами в зависимости от требований, предъявляемых к сканирующему устройству, могут иметь одну или больше отражающих поверхностей.
Системы с одной отражающей поверхностью (рис. 8.3 а, б) обеспечивают наивысшее качество воспроизведения. Одногранные вращающиеся дефлекторы называют спинерами. В современных лазерных выводных устройствах частота вращения спинеров достигает 50 тыс. об./мин.
Дефлекторы с несколькими отражающими поверхностями (гранями) могут быть либо пирамидальными, либо призменными (рис. 8.3 в, г). Многогранные дефлекторы позволяют наиболее эффективно использовать время рабочего цикла (полезное время может достигать 90%), что обеспечивает высокую скорость сканирования – до 50 Мбит/с, при высокой разрешающей способности –до 40 тыс. элементов на строку. В лазерных сканирующих устройствах с большим форматом записи и высокой разрешающей способностью обычно применяются зеркальные призмы или пирамиды с числом граней от 3 до 8. В некоторых высокоскоростных печатающих устройствах число граней может достигать 36.
Сборный призменный дефлектор выполняется в виде вала, установленного на шариковых опорах в корпусе, в качестве которых используются шариковые подшипники, имеющие биение внутреннего кольца относительно наружного не более 1 мкм. На верхнем конце вала укреплен многогранный венец с установленными на его боковых гранях разрезанными опорами. Каждая из опор снабжена винтами, предназначенными для поворота и фиксации наружной плоскости опор относительно горизонтальных осей при регулировке дефлектора. К наружным плоскостям опор с помощью клея крепятся зеркала. Вращение дефлектора осуществляется посредством электродвигателя через шкив, установленный на валу, и ремень с круглым сечением.
Юстировка сборных дефлекторов отличается сложностью. Из-за высокой частоты вращения зеркал их изготавливают из высокопрочных сплавов, обеспечивающих минимальную деформацию граней под действием центробежных сил, причем грани располагают с высокой точностью (десятые доли угловой секунды). В качестве опор используют сверхточные шариковые подшипники и подшипники на воздушной подушке.
Поверхности зеркал вращающихся дефлекторов делают либо плоскими, либо криволинейными. Криволинейные поверхности совместно с фокусирующим объективом участвуют в фокусировке светового луча на светочувствительном материале.
Известны многогранные зеркальные двухкоординатные дефлекторы, выполненные из пакета соединенных между собой полос плоскопараллельных пластин, расположенных веером на общей оси вращения.
Отражающее покрытие выполнено на меньшей боковой грани, ориентированной наклонно к основанию пластины. При вращении каждая последующая боковая грань записывает строку изображения, сдвинутую по вертикали на шаг кадровой развертки.
Одним из эффективных решений повышения точности записи изображения является применение в качестве одногранного вращающегося зеркала пентапризмы 1 (рис. 8.4), установленной непосредственно на валу электродвигателя 2. Оптическая особенность пентапризмы заключается в том, что угол между входящим и выходящим лучами всегда составляет 90° — независимо от того, как точно расположены входная и выходная грани. Это позволяет существенно снизить требования к точности ее установки на валу электродвигателя.
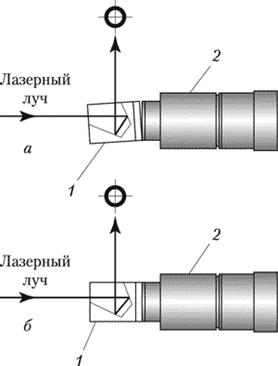 |
Рисунок 8.4 – Дефлектор в виде вращающейся пентапризмы при неточной (а) и точной (б) установке на валу электродвигателя
Одной из разновидностей многогранных зеркальных дефлекторов является голографический дефлектор (рис. 8.5), представляющий собой стеклянную основу 1 с нанесенной на нее голограммой 2. Лазерный луч 5, падающий на голограмму отклоняется от своего исходного положения 3 в положение 4. При этом голограмма записывается так, что при ее сканировании лучом каждый последующий элемент рисунка голограммы осуществляет дополнительное отклонение этого луча.
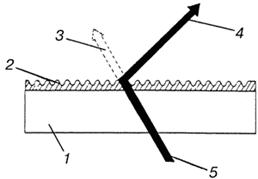 |
Рисунок 8.5 – Голографический дефлектор
Из таких голографических дефлекторов в выводном устройстве (рис. 8.6) образуют гологонное зеркало 4, которое устанавливается на ось электродвигателя 2. При вращении двигателя лазерный луч 1 попадает на разные элементы рисунка голограммы и последовательно отклоняется, постепенно увеличивая угол отклонения. Сфокусированный объективом 5 лазерный луч 6 осуществляет развертку изображения на экспонируемом материале 7. Из-за сложности изготовления голографических дефлекторов они не нашли широкого распространения.
 |
Рисунок 8.6 – Схема развертки с голографическим дефлектором
Системы коррекции. Для поддержания межстрочного расстояния с высокой точностью в сканирующих устройствах необходимо применять исключительно прецизионные дефлекторы, очень сложные в изготовлении. Кроме того, как бы точно ни был изготовлен дефлектор, при его эксплуатации изнашиваются опоры вращения вала, что приводит к неизбежному биению оси вращения дефлектора. Для обеспечения нечувствительности процесса сканирования к угловым ошибкам дефлекторов (то есть к малым отклонениям зеркальных граней дефлекторов от заданного положения) применяются специальные системы коррекции, изменяющие пространственное положение луча и компенсирующие угловые ошибки дефлектора.
В существующих устройствах применяются следующие методы компенсации: пассивная оптическая коррекция, динамическая авторегулировка и программная синхронная коррекция.
Пассивная оптическая коррекция основана на применении в оптической системе цилиндрической и тороидальной оптики. Этот метод компенсации ошибок угла наклона дефлектора представлен на рис. 8.7. Из рисунка видно, что хотя ошибка угла наклона  грани (плоскости А) приводит к отклонению оси конического отраженного пучка света, пятно в плоскости регистрации (плоскость В) по-прежнему отображается в нужную точку. Применение оптической коррекции позволяет ослабить требования к точности углового положения граней дефлектора в 20-100 раз.
грани (плоскости А) приводит к отклонению оси конического отраженного пучка света, пятно в плоскости регистрации (плоскость В) по-прежнему отображается в нужную точку. Применение оптической коррекции позволяет ослабить требования к точности углового положения граней дефлектора в 20-100 раз.
 |
Рисунок 8.7 – Схема оптической компенсации ошибок угла наклона граней дефлектора
В определенной степени оптическая коррекция может быть осуществлена за счет того, что в многограннике развертывающей системы плоские отражающие грани выполнены на дополнительных призмах, установленных в основании. При вращении многогранного дефлектора вокруг оси происходит изменение угла падения луча на его грань и соответственно изменение углового положения в пространстве отходящего от многогранника (выходного) луча. При этом поворот многогранника вокруг других осей (биение) не изменяет углового положения выходного луча в плоскости, перпендикулярной направлению развертки. Это позволяет более точно (при одном и том же классе используемого для изготовления оборудования) выполнить двугранные углы и тем самым существенно (как минимум в четыре раза) повысить точность многогранника.
Динамическая авторегулировка и программная синхронная коррекция являются более совершенными методами и основаны на изучении закона движения лазерного луча для каждой грани дефлектора. В соответствии с этим законом управляют дополнительным отклонением лазерного луча, компенсирующим угловые ошибки дефлектора.
При использовании метода динамической авторегулировки в процессе сканирования отслеживают положение лазерного луча в реальном времени. Измеряют отклонения, вызванные неточностью углов наклона граней дефлектора, и в результате получают сигналы для автоматического управления коррекцией луча.
Корректирующее отклонение луча может осуществляться различными способами, например с помощью компенсирующего зеркала, установленного на пьезоэлементе. На пьезоэлемент поступают электрические сигналы, обеспечивающие перемещение по определенному закону компенсирующего зеркала, которое и корректирует положение луча. Для дополнительного отклонения луча при его пространственной коррекции в некоторых сканирующих устройствах применяют акустооптические дефлекторы.
На рис. 8.8 приведена схема лазерного сканирующего устройства с коррекцией положения луча по методу динамической авторегулировки. В этом устройстве луч лазера 1 модулируется акустооптическим модулятором 2. Для дополнительного отклонения луча по осям Х и Y служат соответственно акустооптические дефлекторы 3 и 4. Значение дополнительного отклонения  и
и  определяется частотами x и y ультразвуковых волн в акустооптических дефлекторах, которые задают управляющим устройством. Затем луч проходит через телескопическую систему 5 и попадает на вращающийся от электродвигателя 7 зеркальный призменный дефлектор 6. Объектив 8 фокусирует луч в плоскости светочувствительного материала 9.
определяется частотами x и y ультразвуковых волн в акустооптических дефлекторах, которые задают управляющим устройством. Затем луч проходит через телескопическую систему 5 и попадает на вращающийся от электродвигателя 7 зеркальный призменный дефлектор 6. Объектив 8 фокусирует луч в плоскости светочувствительного материала 9.
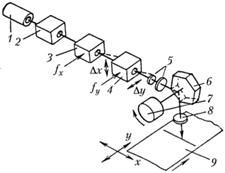 |
Рисунок 8.8 – Сканирующее устройство с системой коррекции на основе акустооптических дефлекторов
Известны и другие технические решения – когда, например, регистрация величины и знака угловых биений оси вращения зеркального дефлектора проводится интерференционным датчиком с фотоприемником. При этом корректирующий сигнал также подается на дополнительный акустооптический дефлектор.
При программной синхронной коррекции предварительно изучают закон движения для каждой грани зеркального многогранника, вводят сигнал коррекции в память управляющего устройства и осуществляют периодическое дополнительное отклонение луча в соответствии с этим сигналом.
Системы синхронизации. При сканировании необходимо осуществлять синхронизацию положения лазерного луча в плоскости изображения с электрическими сигналами, управляющими интенсивностью света, т.е. с работой модулятора Для этого следят за координатой сканирующего луча и дискретно вырабатывают синхросигналы по мере прохождения лучом отрезков пути, равных или кратных величине, обратной разрешению. Необходимость в системах синхронизации возникает из-за непостоянства скорости движения луча вдоль растровой строки вследствие неизбежных колебаний электрического напряжения, управляющего оптико-механическим дефлектором, износа механических деталей, неточностей в изготовлении отдельных поверхностей зеркальных многогранников и других причин.
В известных ФНА синхронизация осуществляется в основном за счет определения положения лазерного луча в ходе развертки растровой строки с помощью измерительных устройств, связанных с дефлектором или расположенных в плоскости изображения.
Этот способ реализуется посредством применения систем отсчета синхроимпульсов на основе шкал на растровых дисках и линейках, а также на основе лазерного интерферометра.
Сигналы синхронизации в системах отсчета с круговыми шкалами поступают от датчика, состоящего из двух соосно расположенных прозрачных дисков с несколькими группами непрозрачных рисок (рис. 8.9). Один из дисков 2 закреплен на валу оптико-механического зеркального дефлектора 1 и вращается совместно с ним. Второй растровый диск 3 неподвижен. Число групп непрозрачных рисок 4 равно числу зеркальных граней дефлектора. Синхроимпульсы создаются и регистрируются двумя парами светодиодов 5 и фототранзисторов 6, расположенных на двух диаметрально противоположных сторонах дисков. Фокусирующий объектив обеспечивает равномерное движение лазерного луча вдоль строки сканирования, поэтому, зная угловое перемещение дефлектора, можно точно определить положение лазерного луча в плоскости изображения. Для запуска схемы синхронизации применяется детектор начала строки сканирования.
 |
Рисунок 8.9 – Система отсчета синхроимпульсов на основе круговой шкалы
Высокую точность позиционирования и синхронизации может обеспечить датчик, отслеживающий положение лазерного луча непосредственно в плоскости изображения. Таким датчиком служит растровая линейка – полоса прозрачного материала, на которую. нанесен растр из непрозрачных рисок. Растровая линейка сканируется вспомогательным лазерным лучом синхронно с разверткой основного записывающего луча. Свет, прошедший сквозь линейку, собирается фотоприемником, а на выходе формируются синхронизирующие импульсы. Частота растровых рисок на линейке определяется требуемым разрешением в горизонтальном на-правлении.
В качестве фотоприемника используется фотодиод, длина активной зоны которого равна длине растровой линейки. При использовании точечных фотоприемников световой луч, перемещающийся по растровой линейке, сводится в неподвижную точку с помощью эллиптического зеркала, установленного за растровой линейкой. В одном из фокусов зеркала расположен фотоприемник, а в другом – отражающая грань дефлектора.
Для сбора света, прошедшего линейку, может использоваться и кварцевый параллелепипед, покрытый алюминием всюду, кроме торцов. Световые сигналы преобразуются в электрические с помощью двух фотоэлектрических умножителей, расположенных с торцов параллелепипеда.
Применение растровых линеек требует дополнительного луча, который создается либо делением основного луча на два, либо вторым лазером, и в обоих случаях это значительно усложняет оптическую систему сканирующего устройства.
Известны сканирующие устройства, в которых применен лазерный интерферометр с несимметричным ходом лучей относительно оси поворота колеблющегося зеркального дефлектора.
Фокусирующие объективы и телескопические системы. Основной характеристикой ЛСУ, определяющей качество получаемого изображения, является разрешающая способность, которая оценивается числом элементов разрешения N, то есть числом различимых направлений луча, укладывающихся в пределах максимального угла:

где а — коэффициент, учитывающий форму сечения лазерного пучка;  — длина волны излучения; D — ширина лазерного пучка, входящего в фокусирующий объектив.
— длина волны излучения; D — ширина лазерного пучка, входящего в фокусирующий объектив.
Размер пятна, сфокусированного на экспонируемом материале, зависит от расходимости  лазерного пучка. Так, например, газовые лазеры могут обеспечить минимальную расходимость:
лазерного пучка. Так, например, газовые лазеры могут обеспечить минимальную расходимость:

Обычно используется световой пучок с круглым сечением (а=1,22). Если такой пучок фокусируется на оптической оси объективом с фокусным расстоянием f, то минимально достижимый диаметр сфокусированного пятна d0 определяется следующим выражением:

Для расширения лазерного пучка и уменьшения его расходимости применяются телескопические системы, которые преобразуют параллельные пучки лучей, входящие в систему, также в параллельные пучки лучей на выходе из нее. Телескопическая система должна состоять как минимум из двух компонентов: объектива и окуляра. Чтобы обеспечить условия параллельности лучей в пучке, необходимо совместить задний фокус объектива с передним фокусом окуляра. Оптическая длина такой системы равна сумме фокусных расстояний объектива и окуляра. Основные оптические характеристики телескопической системы – угловое поле зрения, диаметр выходного зрачка и видимое увеличение, определяемое как отношение диаметра сечения пучков на выходе к диаметру на входе.
Светофильтры. Для регулирования мощности лазерного луча при настройке ЛСУ в соответствии со светочувствительной характеристикой применяемого материала используют нейтральные (серые) светофильтры.
Серые светофильтры являются полупрозрачной оптической средой, которая поглощает проходящий через них свет неизбирательно, т.е. падающий белый световой поток поглощается равномерно по спектру, независимо от длины волны излучений. Степень поглощения света зависит только от прозрачности пропускающей среды и определяется коэффициентом пропускания т, равным отношению прошедшего светового потока Ф к падающему световому потоку  . Конструктивно светофильтры с разными коэффициентами пропускания обычно располагаются на турели (револьверной головке) и выводятся на оптическую ось путем ее поворота.
. Конструктивно светофильтры с разными коэффициентами пропускания обычно располагаются на турели (револьверной головке) и выводятся на оптическую ось путем ее поворота.
Диафрагмы. Для изменения диаметра лазерного луча с целью получения микроточки разного диаметра при записи изображения с различными линиатурами растра используются диафрагмы. Диафрагмы имеют разную апертуру и располагаются на турели. При смене линиатуры записи турель автоматически поворачивается и устанавливает на оптическую ось диафрагму с апертурой, соответствующей диаметру микроточки, формирующей на экспонируемом материале изображение. Недостатком такого механизма является ограниченный набор диафрагм, что не позволяет для каждого значения линиатуры записи изображения подобрать соответствующий размер записывающего пятна. Этот недостаток в некоторых ФНА устранен за счет применения ирисовой диафрагмы, плавно изменяющей в определенных пределах апертуру своего отверстия и соответственно диаметр луча.
Механизм транспортирования материала служит для размещения фотоматериала или формных пластин в положение, при котором осуществляется запись изображения.
|
|
|
|
Дата добавления: 2014-01-15; Просмотров: 2187; Нарушение авторских прав?; Мы поможем в написании вашей работы!