КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Высота орбиты навигационных спутников системы «ГЛОНАСС»- 19100 км, системы «NAVSTAR» - 20180 км
|
|
|
|
Период обращения спутников системы «ГЛОНАСС» — 11 часов 15 минут 44 секунды, системы «NAVSTAR» — 12 часов.
Наклонение орбиты системы «ГЛОНАСС» — 64,8°, системы «NAVSTAR» — 55,0°.
Такая конфигурация орбитальной структуры спутниковых навигационных систем обеспечивает глобальную и непрерывную зоны действии системы, а также оптимальную геометрию взаимного расположения спутников для повышения точности определения координат.
Навигационные спутники систем «GPS» непрерывно излучают радиосигналы различной точности. Так, для системы «ГЛОНАСС» предусмотрены навигационные сигналы двух типов:
Высокой точности (ВТ) — предназначен исключительно для решения задач Министерства Обороны РФ.
Стандартной точности (СТ) — доступен всем потребителям.
Для системы «NAVSTAR» предусмотрены навигационные сигналы трех типов:
Protected (Р-code) — защищенный, предназначенный прежде всего для нужд МО США.
Selective Availability (S/А) — избирательной доступности, преднамеренно создавая значительный и непредсказуемый уход спутниковых часов создает значительные ошибки в определении местоположения для общегражданского круга пользователей.
Clear Acquisition (С/А) — легкой распознаваемости, т. е. — это общегражданский код.
Б — наземная подсистема контроля и управления состоит из группы станций слежения, нескольких станций загрузки на ИЗС и главной станции. Эта подсистема осуществляет мониторинг целостности системы и является первичным источником информации, поставляемой пользователям. Ее основными задачами являются:
· контроль за работой навигационных ИЗС;
· сбор информации для определения и прогноза орбит (эфемерид);
· формирование единой временной системы всего орбитального комплекса и ее синхронизация относительно Всемирного времени и экспортирование данных в память бортовых компьютеров навигационных ИЗС.
Эфемеридно-временная информация закладывается в память ИЗС дважды в сутки, что обеспечивает высокую точность навигационных определений.
В — подсистема пользователей состоит из комплекса аппаратно-программных средств, реализующих основное назначение «GPS» — определение координат для геодезического применения.
Главными факторами широкого использования аппаратуры пользователей «GPS» являются:
· всепогодность;
· оперативность первого определения координат (менее 3 минут от включения приемника);
· непрерывность определения координат (каждые 0,5 с);
· малые габариты и вес приемников;
· малая энергоемкость;
· простота эксплуатации;
· высокая точность;
· сравнительно небольшая стоимость.
Данные позиционирования представляются в любом удобном для пользователя цифровом виде: в различных географических системах координат или в любой прямоугольной системе координат с возможностью описания и систематизации объектов позиционирования.
В настоящее время спутниковые навигационные системы уже нашли широкое применение в следующих областях: военной; на космическом, воздушном, морском, речном, автодорожном, железнодорожном и других видах транспорта; в геодезии, картографии, океанографии; при производстве геофизических и геолого-разведочных работ; в лесном хозяйстве и землеустройстве; рыболовном хозяйстве; в экологическом мониторинге; в научно-исследовательских работах, в том числе фундаментельных и других сферах человеческой деятельности.
В части инженерной геодезии и инженерного дела это безусловно революционный прорыв в будущее, который влечет за собой как радикальное изменение парка инженерно-геодезического оборудования, так и технологий и методов производства работ.
2. Принципы определения координат точек местности с использованием «СРS»
Основной принцип «GPS» — использование навигационных искусственных спутников Земли в качестве подвижных геодезических пунктов (точно координированных точек отсчета) для определения расстояний до них по времени распространения излучаемых ими радиосигналов и вычисления координат на Земле на основе тригонометрических соотношений.
Если предположить, что точное местоположение любого используемого навигационного спутника системы в любой момент времени известно, и известно, как определить расстояния до каждого из них, то основополагающая идея «GPS» оказывается простой.
Допустим, мы не знаем своих координат и пытаемся их определить, используя для этой цели навигационный спутник А, находящийся в настоящий момент времени на расстоянии 21000 км от нас (рис. 1).
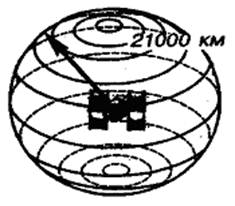
Рис. 1. Определение области местоположения точки по одному навигационному спутнику Земли
Очевидно, область нашего местонахождении в космическом пространстве резко сократится и нас следует искать где-то на сфере с центром в спутнике А и радиусом 21000 км.
Если же при этом известно, что расстояние от искомой точки до второго навигационного спутника В составляет 22 000 км, то единственной областью местонахождения будет линия пересечения двух сфер с центром в спутнике А и радиусом 21 000 км и с центром в спутнике В и радиусом 22 000 км, т. е. окружность (рис. 2).
И наконец, если измерить расстояние еще и до третьего навигационного спутника С, равное скажем 23 000 км, то возможное местоположение искомой точки уже будет сведено всего к двум точкам, находящимся на пересечении сферы с радиусом 23 000 км с окружностью, полученной от пересечения сфер с радиусами 21000 и 22000 км (рис. 3).
Обычно одно из двух возможных решений является нереальным — например, точка расположена слишком далеко от поверхности Земли, либо имеет неправдоподобно большую скорость. Поэтому, программное обеспечение компьютеров приемников «GPS» автоматически выделяет истинное местоположение искомой точки из двух возможных.

Рис. 2. Определение области местоположения Рис. 3. Определение местоположения точки
точки по 2-м навигационным спутникам Земли по 3-м навигационным спутникам Земли
Таким образом, чтобы определить точное местоположение точки, теоретически достаточно трех измерений до трех навигационных спутников. Однако, как будет установлено далее, существует техническая причина, по которой для точного определения местоположения точки требуется еще и, как минимум, четвертое измерение до четвертого навигационного спутника.
Определив расстояния как минимум до четырех навигационных спутников (подвижных геодезических пунктов), в дальнейшем для определения координат (местоположения) точки, решают обычную задачу обратной трилатерации, т.е. обратной линейной засечки.
3. Измерение расстояний до навигационных спутников «GPS»
В связи с тем, что любая «GPS» основана на определении расстояний до навигационных спутников, очевидно должны быть разработаны и соответствующие методы их определения.
Основной принцип определения расстояний до навигационных спутников состоит в измерении времени, за которое радиосигнал спутника достигает приемника на Земле, и в последующем вычислении по этому времени искомого расстояния.
Поскольку радиоволны распространяются с огромной скоростью, т. е. со скоростью света (около 300 000 км/с), нужно уметь очень точно определять момент выдачи сообщения навигационным спутником и момент его приема приемником «GPS» на Земле. Очевидно разница (сдвижка) во времени выдачи сигнала спутником и его приемом на Земле даст время распространения сигнала а, следовательно, и расстояние до данного спутника. При таком подходе часы в системе должны быть исключительно точными и совершенными. Действительно, при ошибке в определении времени распространения радиосигнала всего на 0,01 с ошибка в определении расстояния составит порядка 3000 км.
На каждом навигационном спутнике, в связи с этим, установлен комплект из 4-х самых точных атомных часов, которые чрезвычайно дороги и громоздки. На всех приемниках «GPS» вынужденно, устанавливают очень дешевые и компактные кварцевые часы, которые, однако, существенно уступают по точности хода атомным.
Главной трудностью определения времени распространения радиосигнала является точное выделение момента времени, в которое радиосигнал был передан со спутника. В системах «GPS» эта задача решена синхронизацией сигналов навигационных спутников в Космосе и приемников «GPS» на Земле таким образом, чтобы они точно в одно и то же время генерировали один и тот же бинарный (двоичный) код. Бинарный код — это очень сложная, тщательно подобранная и кажущаяся случайной последовательность логических нулей и единиц, которая повторяется каждую миллисекунду. Такие специально усложненные коды (для надежности и однозначности их сравнения) называют псевдослучайными кода ми (рис. 4).
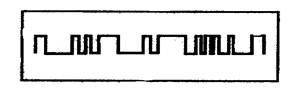
Рис. 4. Псевдослучайный код
Учитывая, что псевдослучайные коды на спутниках и приемниках строго синхронизированы, для определения времени распространения радиосигнала и, следовательно, расстояния до данного спутника, достаточно принять от него радиосигнал и сопоставить его с точно таким же псевдослучайным кодом приемника. Сдвиг одного кода по отношению кдругому будет соответствовать времени прохождения радиосигнала от навигационного спутника до приемника «GPS» (рис. 5).
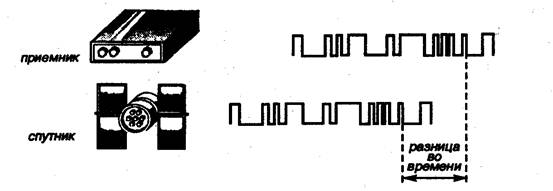
Рис. 5. Определение времени распространения радиосигнала по сдвижке псевдослучайных кодов
Поскольку точность измерения времени распространения радиосигнала кварцевыми часами приемников существенно уступает точности хода атомных часов навигационных спутников, возникает проблема устранения смещения шкалы времени приемников «GPS».
Можно легко установить, что если три точных измерения времени распространения радиосигналов спутников позволяют определить точное местоположение точки в трехмерном пространстве, то тоже самое обеспечивают четыре неточных измерения времени.
Для облегчения понимания этого принципа рассмотрим решение этой задачи в двухмерном пространстве, т. е. на плоскости, временно исключив одно измерение.
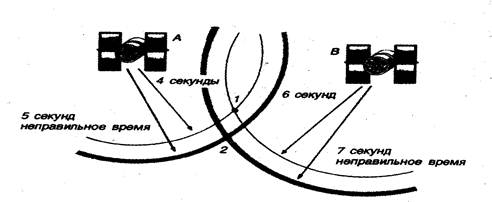
Рис. 6. Определение местоположения точки на плоскости по 2-м измерениям:
1 - по 2-м точным измерениям; 2 – ошибочное определение местоположения точки
по 2-м неточным измерениям
Представим себе, что мы находимся на расстоянии в 4 с от спутника A и в 6 с от спутника В. Этих двух точных измерений было бы достаточно для однозначного определения местоположения точки 1 на плоскости (рис. 6, 1).
Таким образом, местоположение точки 1 было бы установлено, если бы часы приемников «GPS» были бы столь же совершенны, как и атомные часы на навигационных спутниках. Теперь представим себе, что условно часы в приемниках отстают на одну секунду. Тогда расстояния до искомой точки были бы установлены с соответствующими ошибками и составили соответственно до спутника А — 5 с и до спутника В — 7 с. В результате положение искомой точки 1 было бы ошибочно определено в точке 2 (рис. 6, 2).
Следует иметь в виду, что внешне это бы выглядело абсолютно правильным результатом, поскольку у нас нет возможности установить, что часы приемника отстают.
Если к этим построениям добавить еще одно измерение, что в двухмерном пространстве означает измерение расстояния до спутника С, равного, скажем, 8 с, то все три точных измерения дадут положение искомой точки 1 на пересечении трех соответствующих окружностей (рис. 7).
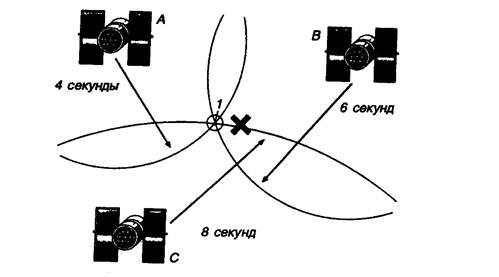
Рис. 7. Определение местоположения точки 1 на плоскости по 3-м точным измерениям
Если учесть, что часы приемника несколько отстают, то в результате трех неточных измерений будут получены три возможных местоположения одной искомой точки (точки 2, 3 и 4), которая может одновременно находиться на расстояниях 5, 7 и 9 с соответственно от спутников А, В и С, что физически невозможно (рис. 8).
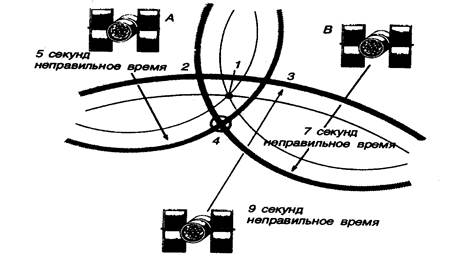
Рис. 8. Определение местоположения точки на плоскости по 3-м неточным измерениям:
1 – точное местоположение точки; 2,3,4 – варианты ошибочного определения местоположения
Штриховые окружности на рисунках соответствуют не истинным дальностям, а так называемым «псевдодальностям», т. е. расстояниям, измеренным по неточным часам приемников «GPS»; Если начать измерять ошибочные расстояния с некоторым одинаковым шагом (в данном случае уменьшать), то можно в конце концов прийти не к трем, а кединственному правильному решению в точке 1. Точное местоположение точки 1 можно также установить решив систему из трех уравнений с тремя неизвестными (правильными расстояниями до спутников). Таким образом, в двумерном пространстве (на плоскости) три неточных измерения дают тот же точный результат, что и два точных измерения.
Программное обеспечение компьютеров приемников «GPS» построено таким образом, что когда в них поступают измерения, не дающие пересечения в одной точке, то в результате решения по меньшей мере четырех уравнений с четырьмя неизвестными (для трехмерного пространства) накопится единственная точка, соответствующая исправленным значениям расстояний до четырех навигационных спутников, т. е. таким образом устраняется неточность хода часов приемника.
Для определения точного местоположения искомой точки в трехмерном пространстве требуется по меньшей мере четыре неточных измерения расстояний (псевдодальностей) до четырех навигационных спутников.
Для определения с необходимой точностью местоположения точек, в системах «GPS» учитывают и другие возможные источники ошибок.
Поскольку в системах «GPS» навигационные искусственные спутники Земли используются как точки отсчета (т. е. как подвижные пункты геодезической сети), то орбиты спутников и местоположение каждого из них на орбитах (эфемериды) должны быть в любой момент времени точно известны. Поэтому каждый приемник «GPS» содержит в памяти своего компьютера «альманах», т. е. непрерывно обновляемый справочник, из которого может быть определено точное местоположение любого спутника орбитального комплекса на любой момент времени.
Незначительные отклонения местоположения навигационных спутников от теоретических орбит (ошибки эфемерид), связанные с влиянием гравитационного поля Солнца и Луны, а также давления солнечного света, обнаруживаются наземными контрольными станциями слежения. Вычисленные поправки корбитам передаются обратно на спутники, заменяя собой прежнюю информацию в памяти бортовых компьютеров. Спутники помимо непрерывной подачи кодовых радиосигналов ежеминутно передают на Землю поправки ксвоему орбитальному положению, обновляя альманахи каждого приемника «GPS».
И, наконец, в системах «GPS» учитывают погрешности, связанные с задержками прохождения радиосигналов через ионосферу и тропосферу Земли. Эти погрешности учитывают либо введением усредненных поправок, либо использованием специальных приемников, работающих на двух радиосигналах разной частоты. В последнем случае ионосферные и тропосферные задержки прохождения радиосигналов определяются непосредственно в ходе измерений, поскольку они обратно пропорциональны квадрату частоты радиоизлучения.
Необходимость для определения местоположения точек измерения расстояний по меньшей мере до четырех навигационных спутников, необходимость учета разнообразных погрешностей измерения расстояний, а также назначение производимых измерений предопределили большое разнообразие конструкций приемников «GPS».
4. Приемники «GPS»
Все, получившие распространение в практике производства инженерных работ приемники, можно условно разделить на две обширные группы.
К nepвой группе относят приемники, работающие по принципу последовательного (поочередного) отслеживания и измерений расстояний до навигационных спутников рабочего созвездия.
Ко второй группе — приемники, отслеживающие и обеспечивающие измерение расстояний одновременно до четырех и более навигационных спутников, т. е. ведущие измерения параллельно.
Внутри каждой из этих двух групп существует большое разнообразие GPS-приемников различного назначения и конструктивных особенностей.
Одноканальные приемники, наиболее экономичные и дешевые, используют в тех случаях, когда не требуется вести измерения «в режиме реального времени», т. е. непрерывно и не требуется измерения скорости объекта, на котором установлен приемник. Прежде чем вычислить координаты местоположения, одноканальный приемник должен выполнить последовательно четыре отдельных измерения до четырех различных спутников. Вся операция по определению координат одной точки может занимать от 2 до 30 с, что во многих случаях может оказаться вполне приемлемым.
Тем не менее, одноканальным приемникам свойственны некоторые недостатки:
· с помощью такого приемника нельзя производить измерения с подвижного объекта (например, с автомобиля при кинематической съемке плана и продольного профиля автомобильной дороги);
· в ходе каждого цикла из четырех измерений приемник должен оставаться неподвижным;
· работа одноканальных приемников по определению координат прерывается в моменты, когда навигационные спутники передают свои информационные сообщения, прием и расшифровка каждого из которых занимает около 30 с.
Двухканальные приемники работают по следующему принципу. Когда один канал приемника производит обработку результатов временных измерений до одного спутника, другой канал устанавливает радиоконтакт с очередным спутником для проведения измерений. Закончив цикл частичной обработки данных, первый канал мгновенно переключается на измерения до очередного спутника без потери времени на его «захват» и «прослушивание». Тем временем второй канал, называемый административным, обращается к следующему спутнику и т. д. Административный канал используется для приема информационных сообщений спутников без прерывания процесса определения координат местоположения и может быть использован для обработки временных измерений. Кроме того, современные двухканальные приемники программируются для слежения за более чем четырьмя спутниками и в тех случаях, когда за одним из рабочих спутников оказывается потерян контроль, мгновенно используется другой, без перерыва процесса определения координат. Все это существенно ускоряет работу приемников.
Многоканальные приемники (непрерывного слежения). Такие приемники одновременно отслеживают 4 и более спутников. Многоканальные приемники, используемые при производстве инженерно-геодезических работ, могут иметь 4, 6, 8, 10, 12 и даже 24 канала слежения. Кроме очевидного преимущества — непрерывного определения координат в режиме реального времени, скорости и траектории движения, многоканальные приемники могут обрабатывать сигналы всех спутников рабочего созвездия, видимых в настоящий момент на небосклоне, а некоторые приемники одновременно и спутников разных орбитальных систем: NAVSTAR (США) и ГЛОНАСС (Россия).
Одночастотные и двухчастотные приемники. Кроме приемников (одно/двухканальных и многоканальных), работающих на одной частоте радиоволн в практике инженерно-геодезических работ используют и многоканальные двухчастотные приемники, работающие с использованием кодов на двух частотах: 1575,72 МНz и 1227,6 MHz. Приемники такого уровня обеспечивают более точное определение координат точек местности, в связи с возможностью дифференцированного учета для каждого рабочего спутника ионосферных и тропосферных задержек, а также обеспечивают быструю инициализацию (присваивание начальных значений) приемника, что особенно актуально в местах, где могут часто блокироваться сигналы спутников.
По точности определения координат и назначению различают приемники следующих классов:
· навигационного класса сточностью определения координат 150 — 200 м;
· класса картографии и ГИС сточностью определения координат 1 — 5 м;
· геодезического класса сточностью определения координат до 1 см.
Приемники навигационного класса дешевы и компактны (рис. 9).

Рис. 9. Одночастотный 12-канальный GPS – приемник навигационного класса точности «Eagle Explorer»
Приемники навигационного класса точности призваны решать главным образом навигационные задачи на транспорте, в народном хозяйстве (например, при поиске полезных ископаемых и т.д.) и отдыхе.
Приемники класса точности картографии и ГИС также относительно дешевы и доступны проектно-изыскательским и строительным организациям (рис. 10).
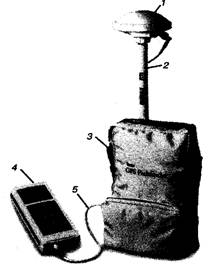
Рис. 10. Одночастотный 12-канальный GPS – приемник навигационного класса точности картографии и ГИС «Pathfinder ProXL»:
1 – компактная антенна с обтекателем; 2 – полуметровая сборная стойка; 3 – сумка для переноса системы; 4 – накопитель TDC1; 5 – кабель загрузки данных
Точность приемников класса картографии и ГИС может быть существенно повышена при базовом варианте их использования в случае применения базовых станций, и они могут быть использованы при решении большинства инженерно-геодезических задач, включая задачи, решаемые в режиме реального времени (например, съемка плана и продольного профиля существующей автомобильной дороги с движущегося автомобиля).
Приемники геодезического класса точности весьма недешевы, однако даже в автономном режиме работы обеспечивают определение координат точек местности с точностью до 1 — 3 см в кинематическом режиме и до 1 см при статических измерениях, и поэтому применимы для решения практически любых инженерно-геодезических задач.
При огромном многообразии приемников «GPS», обеспечивающих выполнение инженерно-геодезических задач на изысканиях и в строительстве, нужно стремиться приобретать приемники и геодезические системы, работающие не только с орбитальным комплексом США «NAVSTAR», но, прежде всего, работающие с навигационной системой «ГЛОНАСС».
5. Организация геодезических работ с использованием базовых станций «DGPS»
Использование сравнительно недорогих GPS-приемников класса точности определения координат картографии и ГИС, дающих ошибки до нескольких метров оказывается возможным и для измерений геодезического класса точности (до 1 см), если использовать методику дифференциального (относительного) позиционирования в режиме работы с базовыми станциями, получившими название «Differential GPS» — «DGPS».
Технология дифференциального позиционирования основана на том, что ошибки определения абсолютных координат разными приемниками одних и тех же марок в пределах одного локального участка местности практически одинаковы. Тогда, если установить DGPS-приемник (базовую станцию) в точке с точно известными координатами, можно определять разницу между эталонными и GPS-координатами и ретранслировать поправки по радиоканалам на другие (ведомые) GPS-приемники.
Базовую DGPS-станцию устанавливают на точке с точно известными высотой и плановыми координатами (например, на пункте государственной геодезической сети) либо на пункте, специально созданном в любом удобном месте и привязанном традиционными методами наземной геодезии к пунктам государственной геодезической сети.
Сверхточные измерения с использованием приемников относительно невысокой точности сводятся кнепрерывному сбору данных в течение некоторого отрезка времени при неподвижном приемнике и точном знании координат некоторой «опорной» точки, в которой установлена DGPS-станция. Современные GPS-приемники геодезического класса и даже класса картографии и ГИСуже позволяют выполнять съемочные работы в режиме «кинематической съемки», т. е. в режиме перемещения реечников от точки кточке, в каждой из которых координаты мгновенно регистрируются геодезистом на магнитные носители простым нажатием кнопки. То же самое можно делать и при выполнении съемки в реальном масштабе времени плана и профиля существующих автомобильных дорог при их реконструкции с движущегося автомобиля при скорости до 30 км/ч.
Высокую точность определения координат точек местности при использовании базовых DGPS-станцийможно обеспечить приемниками умеренной точности, находящимися на расстоянии в пределах до 10 км от базовой DGPS-станции. Корректирующий сигнал автоматически устраняет все возможные ошибки системы, независимо от того, связаны ли они с неточностью хода часов, ошибками эфемерид или ионосферными и тропосферными задержками радиосигналов. Именно по этой причине в качестве ведомых могут использоваться не только дорогие двухчастотные, но и относительно дешевые одночастотные приемники (рис. 11).
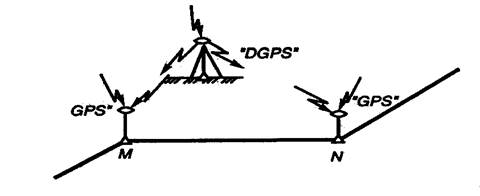
Рис. 11. Схема геодезических измерений с использованием базовой станции «DGPS»
Работу с базовыми опорными DGPS-станциямиорганизуют двумя способами.
В первом способе сопорной станции по телеметрическим каналам ведомым приемникам передаются сообщения об ошибках, а затем их компьютеры обрабатывают эти сообщения совместно с собственными данными о местоположении, определенном по спутниковым сигналам.
Во втором способе базовая DGPS-станция работает в режиме «псевдоспутника». Станция передает сигналы той же структуры, что и спутники, т. е, содержащие псевдослучайные коды и информационные сообщения. Ведомые приемники обрабатывают сигналы базовой станции в одном изсвоих неиспользованных каналов, т. е. получают данные коррекции тем же путем, что и данные об эфемеридах от навигационных спутников орбитального комплекса.
|
|
|
|
|
Дата добавления: 2014-01-15; Просмотров: 3893; Нарушение авторских прав?; Мы поможем в написании вашей работы!