КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
И свойства
|
|
|
|
Термин «эргономика» (греч. ergon – работа, nomos – закон) обозначает науку о взаимодействии человека-оператора с машиной и средой, объединённых в единую эргатическую систему. Эргономика возникла на стыке технических наук, психологии, физиологии и гигиены труда.
Инженерная психология является отраслью эргономики и ставит своей задачей комплексное изучение и проектирование внешних и внутренних средств деятельности человека-оператора.
Художественное конструирование подразумевает использование основных законов эргономики и технической эстетики при разработке конструкций.
Важнейший вопрос проектирования эргатических систем представляет собой строго научное разделение функций между оператором и машиной в будущей системе. Этого не может сделать ни психолог, ни физиолог, ни гигиенист, поскольку они не знают свойств машины требуемых характеристик всей системы. Это обязан сделать конструктор-разработчик, обладающий знаниями эргономики, знающий возможности оператора в системе, уровень современной автоматики и реализующий общие требования на систему.
Важность развития этой науки в областях радиотехники и конструирования РЭА подчёркивается тем примером, что сравнительный анализ ряда существующих американских ракетных систем показал, что ошибки человека-оператора составляют 20-53% всех отказов в системе. Нетрудно уяснить, какую роль играет человек-оператор в современных системах летательных аппаратов и автоматизированных системах контроля и производства. Поэтому изучение возможностей человека-оператора в замкнутой эргатической системе, согласования его аппарата восприятия с РЭА для оптимизации основной целевой функции системы является не «модой», а такой же необходимой задачей, как и само проектирование технических средств.
Понятие эргатических систем и их свойства.
В общее понятие «система» входит совокупность элементов, взаимосвязанные функции которых координированы для выполнения некоторой общей задачи.
Эргатическая система (ЭС) – это система «человек-машина», содержащая качественно разнородные компоненты – человека и технические средства. Эргатические системы чрезвычайно разнообразны и иерархичны. Например, система «командир корабля(первый пилот) – приборы, органы управления – самолет» и система «штурман-радист – радиоаппаратура самолёта» находятся не только во взаимосвязи, но и подчинены общей более сложной системе «самолёт, выполняющий задание», которую обслуживают и ряд других наземных систем и комплексов, являющиеся также эргатическими системами.

Рис.2.9. Система управления.
Л5
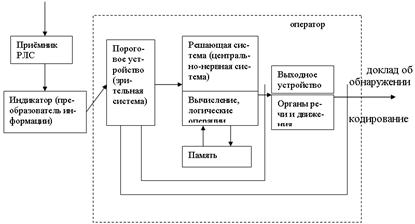
Рис.2.10. Система обнаружения-контроля
а) Замкнутая сервосистема

б) Аналогия слежения, осуществляемая оператором

Рис.2.11. Сервосистема
В настоящее время системы «человек-машина» в связи с развитием технических средств всё более и более превращается из систем контроля в системы управления, в которых человек-оператор занимает доминирующее положение. Можно привести несколько примеров моделирования как самого человека-оператора в эргатических системах, так и самих систем в целом. Например, для систем управления предлагается одна схема (рис.2.9.), а для систем обнаружения и контроля – другая схема (рис.2.10.). Весьма часто проводится аналогия между эргатической системой и сервосистемой (рис.2.11.). Сервосистема – тип следящей системы, замкнутая электромеханическая система, где на выходе воспроизводится изменённая определённым образом входная величина.
Классификация эргатических систем может быть проведена по ряду признаков. По основной целевой функции они делятся на контрольные, управления, поисковые, восстанавливающие и обучающие эргатические системы.
В первом случае (контрольная ЭС – см рис. 2.10.) выходные сигналы оператора можно не вводить в наблюдаемую им систему. Оператор здесь включён в систему «как бы параллельной» (хотя на схеме рисунка это выглядит последовательно). Основная функция оператора – контроль, наблюдение за системой, измерение её параметров и т. п. Примером такой системы может являться работа оператора с индикатором кругового обзора ИКО.
В системе управления (см рис.2.9) оператор становится непосредственным участником в выполнении системы её задачи и включён в систему «как бы последовательно» (по схеме рисунка – параллельно) с техническими элементами системы. Основная функция оператора – регулирование, слежение, стабилизация и приведение координат выхода системы к их заданному значению. Эта система замкнута через оператора.
Системы управления имеют две разновидности: систему слежения с компенсацией и систему слежения с преследованием. В первом случае оператор наблюдает только рассогласование между текущим выходным показателем (координатой) системы и требуемым значением, и его задача состоит в том, чтобы довести величину рассогласования до нуля или до заданного уровня, то есть скомпенсировать ошибку рассогласования. Примером таких систем могут являться системы регулирования самой РЭА, системы регулирования технологических процессов и т. п.
При слежении с преследованием оператор наблюдает величину как входного, так и выходного сигнала, и его задача состоит в том, чтобы, управляя машиной, изменять выход системы и тем самым как бы «преследовать» её вход. Примерами таких систем могут являться системы посадки самолёта, работы бортовой РЛС в режиме захвата и сопровождения цели и др.
Поисковая ЭС, как правило, возникает при отказе функционирующей ЭС, когда требуется вмешательство оператора для определения причин и места отказа в системе. Она включает в себя оператора, проверяемую машину и устройство поиска.
Восстанавливающая ЭС возникает после определения причины отказа, и главная функция оператора в такой системе – восстановить систему путём ремонта или демонтажа неисправного блока.
Примерами обучающих ЭС являются различного рода тренажёры, обучающие машины и т. п.
По типу информационной модели ЭС делятся на:
1) ЭС с дифференциальной информационной моделью,
2) ЭС с интегральной информационной моделью.
Дифференциальная информационная модель (ИМ) включает в себя подробные сведения об отдельных параметрах ЭС. Как правило, информация от «машины» к оператору поступает первичная, без предварительной обработки. При этом оператор получает точную количественную оценку состояния отдельных элементов технической части ЭС, её выходных параметров. Чтобы получить общее представление о состоянии ЭС на основе показаний детальной ИМ, оператору необходимо определённое время для обработки всей разрозненной информации. При дефиците времени это может привести к принятию неверных решений. Примером такой дифференциальной модели может служить совокупность контрольных шкальных приборов, устанавливаемых раньше в кабине лётчика. Поэтому при современных скоростях самолётов стремятся создавать совмещённые индикаторы (рис. 2.12), однако, назвать их интегральной ИМ пока что нельзя.
Интегральная ИМ даёт общее, суммарное представление о функционировании ЭС, для этого в системе используют дополнительные блоки обработки первичной информации. Например, разработаны т. н. коналоги (рис. 2.13) – индикаторы, дающие условные изображения взлётно-посадочной полосы или «дороги» при движении объекта. Хотя изображение и проецируется на электронно-лучевом индикаторе, однако оно не является телевизионным.
Основное преимущество коналогов состоит в том, что они позволяют использовать основное свойство восприятия – предметность. Кроме этого, рассмотренный выше тип коналога позволяет освободиться от восьми отдельных индикаторов. Другой особенностью коналогов является также то, что они предусматривают и получение точной количественной информации либо «по вызову», либо с помощью дополнительных периферийных индикаторов, обрамляющих коналог.
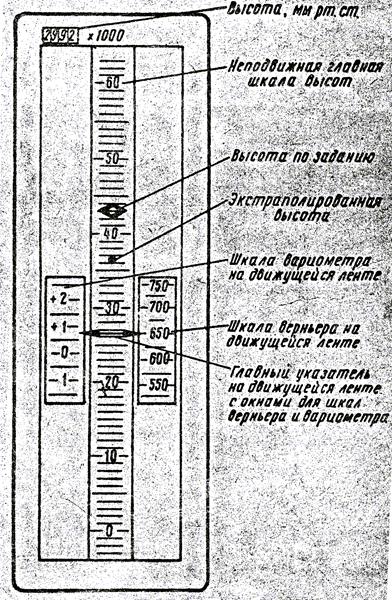
Рис. 2.12. Совмещённый самолётный индикатор
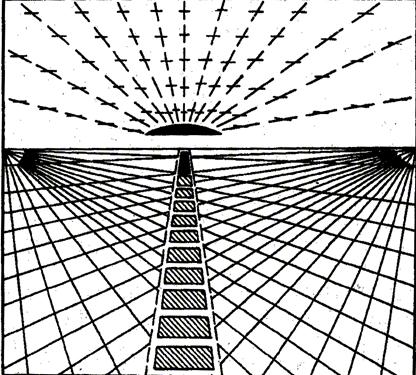
Рис. 2.13. Совмещённый самолётный индикатор коналог
Свойства ЭС определяются свойствами основных её звеньев, а именно, оператора и «машины». Отметим некоторые из них, по которым оператор или машина превосходят друг друга при выполнении определённых функций.
Оператор превосходит «машину» в следующих функциях:
- обнаружении слабых световых и звуковых сигналов;
- восприятии, интерпретации и организации сигнальных образов различных модальностей;
- осуществлении гибких операций управления;
- хранении большого количества информации в течении длительного времени и её использовании в нужный момент;
- образовании индуктивных умозаключений;
- изменении показателей в результате обучения;
- формировании понятий и выработке методов;
- организации и объединении показаний входов, различных по модальности, по параметрам.
«Машина» превосходит человека-оператора:
- быстротой ответа на сигнал;
- способностью применять плавно и точно большую силу;
- выполнением повторных стереотипных действий и задач;
- хранением информации в сжатой форме и полным освобождением от ненужной информации;
- скоростью расчётов;
- способностью выполнять одновременно несколько различных функций.
Прежде чем более подробно остановиться на параметрах оператора и технических средств и их согласовании, отметим некоторые общие правила разработки ЧМС:
- При разработке ЭС необходимо применять системный подход, а именно:
а) выяснять взаимосвязи и свойства совокупности объектов, входящих в систему, в том числе и оператора;
б) создавать и применять такие системы, которые давали компромиссы между «машиной» - оператором – средой для оптимизации основной целевой функции всей системы («получить оптимальную систему из всех оптимальных звеньев невозможно»);
- Несмотря на совместное выполнение функций оператором и «машиной», каждая из таких составляющих ЭС подчиняется в своей работе собственным, свойственным ей принципам и закономерностям;
- Необходимо помнить, что оператор «не любит крайностей»: ему плохо работается как при дефиците, так и при избытке времени (информации), как при ярком освещении, так и в темноте и т. д.
- Система должна быть сконструирована так, чтобы оператор мог непрерывно принимать участие в её функционировании на уровне, соответствующем его возможностям (низкий уровень интереса к работе и морального состояния оператора может быть связан с двумя причинами: когда аппаратура требует высокой квалификации от низкоквалифицированного оператора и, наоборот, низкой квалификации от высококвалифицированного оператора);
- Максимальная автоматизация не всегда полезна; думающий оператор занимает центральное место в системе; поэтому задача состоит в том, чтобы показать, что система поддаётся высокой автоматизации, а в том, чтобы доказать, что она нуждается в ней; машина служит не для вытеснения и замены оператора, а для умножения его мощи и способностей.
В заключении рассмотрим вопросы распределения функций в ЧМС. При проектировании любой радиоэлектронной системы, будь то радиолокационная станция, система ближней навигации, контрольно-испытательная аппаратура или просто электронные часы, мы, по существу, решаем задачу распределения функций между человеком и РЭС. Обоснование рационального или оптимального варианта распределения этих функций опирается на результаты количественных оценок качества выполнения задач оператором и РЭС и методы оценок влияния этого качества на эффективность системы в целом. В результате распределения функций между оператором и РЭС могут быть получены исходные данные для обоснования объёма информации, вида её предъявления, скорости и способа её обработки.
Функции человека в системе «оператор - РЭС» достаточно разнообразны и определяются особенностями РЭС. В системах обнаружения сигналов (например, локационный обзор участка пространства) человек осуществляет обнаружение, наблюдение, классификацию сигналов с помощью тех признаков, которые учтены автоматизированным устройством системы; получение информации и её согласование с пропускной способностью каналов связи. Диспетчерские системы обеспечивают следующие функции человека: выдачу и редактирование исходных данных; выдачу команд и пуск системы; принятие решений в неопределённых ситуациях; прогнозирование обстановки при её изменении; выбор целей в зависимости от обстановки; операции контроля за работой системы.
Системы слежения позволяют определить «свой – чужой» объект, следить за сигналами с помощью признаков, не учтённых в каналах автоматической обработки информации, принимать решения в аварийных ситуациях.
Функция человека в системах связи можно определить следующим образом: выбор каналов связи в зависимости от обстановки, выделение значимой информации и её классификация по приоритету, обеспечение слуховой радиосвязи, передача информации.
В контрольно-испытательных системах (стенды, пульты) оператор должен определять виды программ автоматической проверки системы и выдавать команды на их пуск, оценивать результаты проверки стенда, выборочно проверять состояние и функционирование узлов и частей системы при отсутствии информации о неисправностях, диагнозировать вид неисправности и её причины, принимать решения о мерах по восстановлению системы.
2.3.2. Психологические характеристики и параметры
|
|
|
|
Дата добавления: 2014-01-15; Просмотров: 472; Нарушение авторских прав?; Мы поможем в написании вашей работы!