КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
ЛЕКЦИЯ № 3
|
|
|
|
2.3. Кинематический анализ рычажных механизмов
Задачей кинематического анализа рычажных механизмов является определение кинематических параметров и кинематических характеристик всех звеньев и характерных точек механизмов по заданному закону движения входного (ведущего звена).
Характерные точки механизма – это центры масс звеньев, центры кинематических пар, к которым присоединяются дополнительные кинематические цепи или исполнительные устройства и др.
Кинематические параметры звеньев – это их положения, скорости и ускорения, линейные или угловые.
Кинематические параметры точек – это координаты их положения, линейные скорости и ускорения.
Кинематические характеристики – это зависимости кинематических параметров от положения ведущего звена механизма во всем диапазоне его работы.
Сложность кинематического анализа зависит не столько от числа звеньев механизма, сколько от его класса.
Кинематические характеристики необходимы инженеру для оценки работоспособности механизмов не только на стадии проектирования, но и в эксплуатации (в особенности при модернизации машин).
Анализ выполняют по кинематической схеме, которая в отличии от структурной схемы содержит размеры звеньев, необходимые для расчета.
Для кинематического анализа рычажных механизмов используют аналитические, графические и экспериментальные методы.
Аналитические методы основываются на различных методах математического анализа, отличаются высокой точностью определения параметров в каждый момент времени работы механизма и позволяют использовать ЭВМ. Среди аналитических методов наиболее распространены методы аналитической геометрии и тензорно-матричных операций.
Графические методы расчетов обладают наглядностью и отличаются удобством контроля. В ряде случаев графическое вычисление основано на геометрических построениях, с некоторым приближением заменяющих аналогичные аналитические и численные операции. Имеется много примеров, когда графические приемы являются единственно приемлемыми, т.к. дают наиболее простое решение. Точность графических методов 0,3…0,5 % достаточна для решения практических задач.
Экспериментальные методы используются преимущественно для оценки точности расчетных моделей и методов.
2.3.1. Аналитический метод кинематического анализа рычажных механизмов
Наиболее распространенным методом является метод замкнутых векторных контуров. Для его использования вдоль каждого звена, составляющего замкнутый контур, направляют вектор. Угловое положение его определяется углом, положительное направление которого отсчитывается в направлении против часовой стрелки от положительной полуоси абсцисс. Метод сводится к совместному решению уравнений проекций на оси координат векторного контура механизма с последующим дифференцированием полученных уравнений для определения скоростей и ускорений.
Ниже приведены примеры кинематического анализа некоторых механизмов.
Кривошипно-ползунный механизм. Кинематическая схема механизма приведена на рис. 2.5, а. Для механизма известны: длины звеньев  ,
,  ; угловая скорость начального звена
; угловая скорость начального звена  ; расположение центра тяжести звена
; расположение центра тяжести звена
2 – точки  . Необходимо определить кинематические параметры звеньев 2 и 3 в функции положения ведущего звена
. Необходимо определить кинематические параметры звеньев 2 и 3 в функции положения ведущего звена  а также закон движения точки
а также закон движения точки  :
: 
|
|
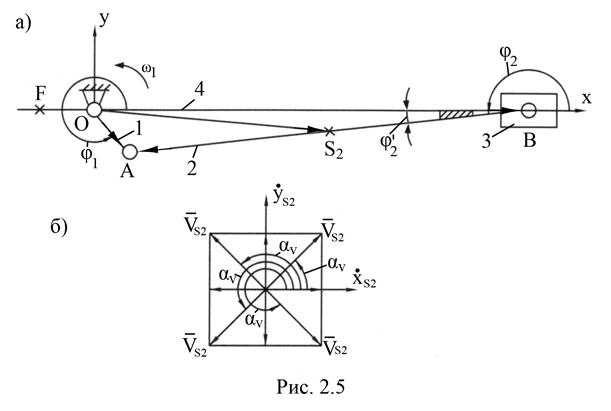
Начало координат  системы координат
системы координат  располагают на оси вращения начального звена или в какой-либо другой точке, а ось абсцисс Ох связывают со стойкой (точки
располагают на оси вращения начального звена или в какой-либо другой точке, а ось абсцисс Ох связывают со стойкой (точки  и
и  механизма на рис. 2.5, а). На этом же рисунке показаны направления векторов и соответствующие им углы для замкнутого векторного треугольника
механизма на рис. 2.5, а). На этом же рисунке показаны направления векторов и соответствующие им углы для замкнутого векторного треугольника  .
.
Векторное уравнение замкнутого треугольника имеет вид
 (2.2)
(2.2)
Спроектируем векторное уравнение на оси координат х и у
 (2.3)
(2.3)
С помощью второго уравнения системы уравнений (2.3) можно определить угол 
 при
при  (2.4)
(2.4)
 при
при 
где  - острый угол
- острый угол
 ; (2.5)
; (2.5)
 – признак сборки кривошипно-ползунного механизма, определяемый с помощью дополнительной точки
– признак сборки кривошипно-ползунного механизма, определяемый с помощью дополнительной точки  (рис. 2.5, а). Точка расположена на оси
(рис. 2.5, а). Точка расположена на оси  . Признак сборки если ползун расположен слева от точки кривошипа, и при правом расположении ползуна относительно кривошипа. Для механизма на рис. 2.5, а
. Признак сборки если ползун расположен слева от точки кривошипа, и при правом расположении ползуна относительно кривошипа. Для механизма на рис. 2.5, а 
Из первого уравнения системы уравнений (2.3) можно определить координату точки В
 (2.6)
(2.6)
Для определения скоростей звеньев 2 и 3 продифференцируем систему двух уравнений (2.3) по времени
 (2.7)
(2.7)
Или с учетом равенств



будем иметь систему
 (2.8)
(2.8)
Из второго уравнения системы уравнений (2.8) получим выражение для  , а из первого – для
, а из первого – для  :
:
 (2.9)
(2.9)
 (2.10)
(2.10)
Повторное дифференцирование системы уравнений (2.8) позволяет получить выражения для ускорений звеньев 2 и 3. С учетом равенств



эти выражения имеют вид
 (2.11)
(2.11)
 (2.12)
(2.12)
Для определения закона движения центра тяжести звена 2 – точки  составим новый замкнутый векторный контур
составим новый замкнутый векторный контур  (рис. 2.5, а). Векторное уравнение его имеет вид
(рис. 2.5, а). Векторное уравнение его имеет вид
 (2.13)
(2.13)
Проектируя уравнение на оси координат, получим координаты точки S2
 (2.14)
(2.14)
Первая и вторая производные от  и
и  дадут значения составляющих скорости и ускорения точки
дадут значения составляющих скорости и ускорения точки
 (2.15)
(2.15)
 (2.16)
(2.16)
 (2.17)
(2.17)
 (2.18)
(2.18)
Значения полных векторов скорости и ускорения точки будут
 (2.19)
(2.19)
 (2.20)
(2.20)
Положение вектора скорости относительно оси  определяется углом
определяется углом  (рис. 2.5, б)
(рис. 2.5, б)
 при
при 
(2.21)
 при
при 
Аналогично определяется положение вектора ускорения углом 
 при
при  (2.22)
(2.22)
 при
при  (2.23)
(2.23)
Результаты вычисления кинематических характеристик звеньев 2 и 3, выполненных на ЭВМ для кривошипно-ползунного механизма с исходными данными  приведены соответственно на
приведены соответственно на
рис. 2.6, а и 2.6, б.
|
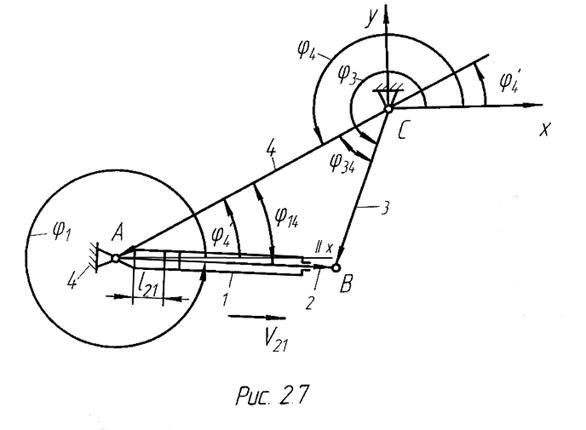
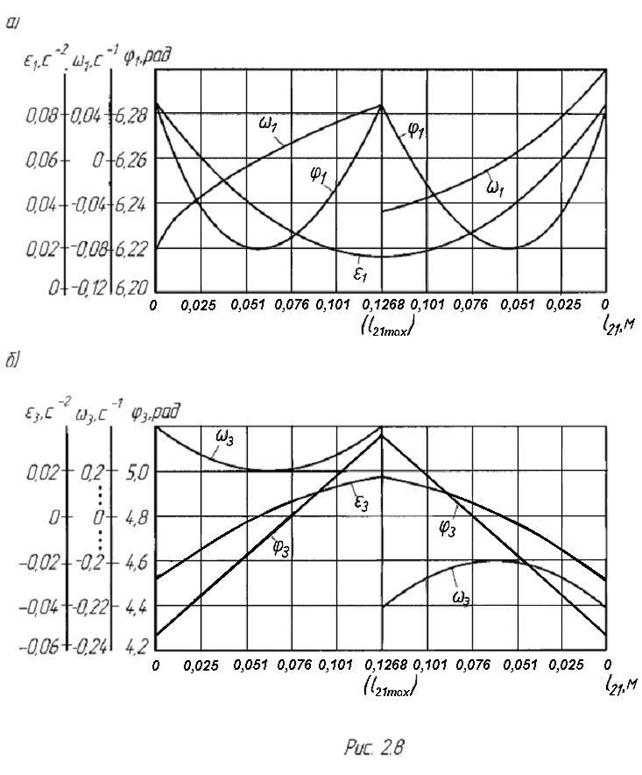
Механизм с гидроцилиндром. Кинематическая схема механизма приведена на рис. 2.7. Обобщенной координатой здесь является положение поршня со штоком 2 относительно гидроцилиндра 1  . Известны длины звеньев
. Известны длины звеньев  угол
угол  , определяющий положение стойки
, определяющий положение стойки  ; скорость поршня относительно цилиндра
; скорость поршня относительно цилиндра  . Необходимо определить кинематические параметры звеньев 1-2 – гидроцилиндра с поршнем и коромысла 3 в функции обобщенной координаты:
. Необходимо определить кинематические параметры звеньев 1-2 – гидроцилиндра с поршнем и коромысла 3 в функции обобщенной координаты: 
Если принять направления векторов, связанных со звеньями, в соответствии с рис. 2.7, то векторное уравнение замкнутости контура  имеет вид
имеет вид
Проекции векторного уравнения на оси координат х и у дадут систему уравнений, из которой можно определить искомые углы  и
и  :
:
 (2.24)
(2.24)
Здесь  - длина гидроцилиндра со штоком поршня;
- длина гидроцилиндра со штоком поршня;  - расстояние между точками
- расстояние между точками  и при вдвинутом поршне.
и при вдвинутом поршне.
Поскольку неизвестные углы находятся под знаком тригонометрических функций, определение их несколько затруднено. Можно предложить более простой путь решения задачи о положениях.
Определим вспомогательные углы  и
и  по теореме косинусов из
по теореме косинусов из 
Искомые углы и определяются по рис. 2.7:

Здесь угол  представляет собой модуль вспомогательного угла и определяется как
представляет собой модуль вспомогательного угла и определяется как
Формулы для определения углов и не является универсальными, а справедливы только для данной схемы механизма.
Для определения угловых скоростей звеньев 1-2 и 3 необходимо продифференцировать по времени систему уравнений (2.24). С учетом равенств
будем иметь систему уравнений
 (2.25)
(2.25)
Решая ее относительно неизвестных  и
и  путем несложных преобразований получим следующие выражения для угловых скоростей
путем несложных преобразований получим следующие выражения для угловых скоростей
 (2.26)
(2.26)
 (2.27)
(2.27)
Аналогично определяются угловые ускорения звеньев. Дифференцирование системы уравнений (2.25) по времени с учетом равенств
дает следующую систему двух уравнений при условии, что  и
и 
 (2.28)
(2.28)
Отсюда определяются искомые выражения для угловых ускорений звеньев
 (2.29)
(2.29)
 (2.30)
(2.30)
Очевидно, что  и
и 
Полученные формулы для определения угловых скоростей и ускорений звеньев 1-2 и 3 являются универсальными, т.е. справедливы для любой схемы механизма с гидроцилиндром II класса с принятыми направлениями векторов.
Результаты вычисления кинематических характеристик поршня со штоком и звена 3 в функции обобщенной координаты для обоих направлений движения поршня ( и
и  ) приведены на рис. 2.8, а и 2.8, б соответственно и рассчитаны для механизма со следующими исходными данными:
) приведены на рис. 2.8, а и 2.8, б соответственно и рассчитаны для механизма со следующими исходными данными: 
2.3.2. Графоаналитический метод кинематического анализа рычажных механизмов
Графоаналитический метод определения кинематических параметров механизмов сводится к построению планов их положений, скоростей и ускорений.
План положений механизмов – это графическое изображение взаимного расположения звеньев, соответствующее выбранному расчетному положению начального звена.
План скоростей механизма – это чертеж, на котором изображены в виде отрезков векторы, равные по модулю и по направлению скоростям различных точек звеньев механизма в данный момент.
План ускорений – это чертеж, на котором изображены в виде отрезков векторы, равные по модулю и направлению ускорениям различных точек звеньев механизм в данный момент.
Кривошипно-ползунный механизм. На рис. 2.5, а показан план положений механизма для значения обобщенной координаты  Для построения плана положений необходимо задаться масштабным коэффициентом
Для построения плана положений необходимо задаться масштабным коэффициентом  , определяемым как
, определяемым как
 (2.31)
(2.31)
где  - действительная длина звена 1;
- действительная длина звена 1;  - длина отрезка, изображающего звено 1 на плане положений.
- длина отрезка, изображающего звено 1 на плане положений.
Иногда вместо масштабного коэффициента плана положений задают масштаб плана, который является обратной величиной масштабного коэффициента.
Значение масштабного коэффициента определяет длину отрезка  , соответствующего длине
, соответствующего длине  звена 2:
звена 2:

План положений позволяет определить угол и координаты точек  и :
и :
 (2.32)
(2.32)
Для построения плана скоростей должна быть известна кинематическая схема механизма, построенная в масштабе (рис. 2.9, а), и задан закон движения начального звена (например,  ).
).

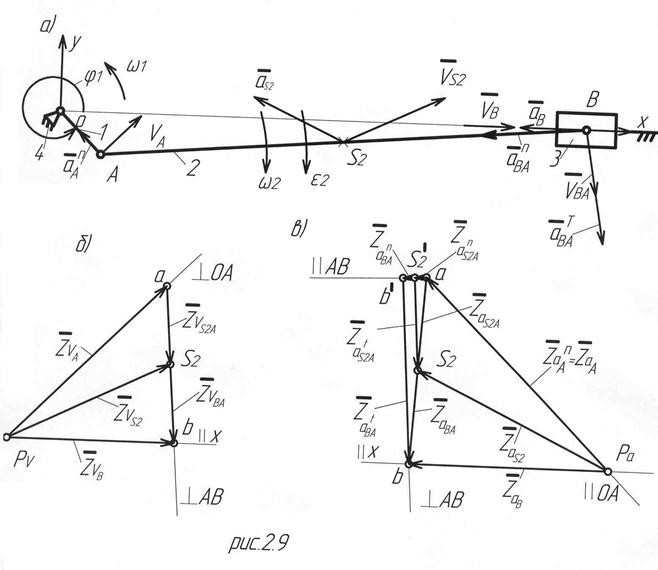
Требуется найти линейные скорости точек  , и , и также угловую скорость звена 2.
, и , и также угловую скорость звена 2.
Построение плана скоростей начинается с определения скорости точки кривошипа
 (2.33)
(2.33)
Вектор скорости точки направлен перпендикулярно кривошипу  в направлении его вращения.
в направлении его вращения.
Скорость точки , принадлежащей звену 2, можно представить как векторную сумму скоростей переносного  и относительного
и относительного  движений
движений
 (2.34)
(2.34)
Переносным движением звена 2 является поступательное движение его со скоростью точки

а относительным – вращательное движение звена 2 вокруг точки А. Если обозначить относительную скорость через  , то
, то

Окончательное векторное уравнение для скорости точки В будет иметь вид
 (2.35)
(2.35)
В этом уравнении векторы скоростей, известные по величине и направлению, подчеркнуты двумя чертами, а известные лишь по направлению – одной чертой.
Для определения указанных неизвестных величин строим план скоростей с выбранным масштабным коэффициентом 
 (2.36)
(2.36)
Здесь
 - длина отрезка, изображающего на плане скорость
- длина отрезка, изображающего на плане скорость  .
.
Из произвольной точки полюса плана скоростей  (рис. 2.9, б) проведем вектор , перпендикулярный кривошипу ОА, соответствующий на плане скоростей абсолютной скорости
(рис. 2.9, б) проведем вектор , перпендикулярный кривошипу ОА, соответствующий на плане скоростей абсолютной скорости  . Из конца вектора (точка а) проводим линию в направлении относительной скорости
. Из конца вектора (точка а) проводим линию в направлении относительной скорости  , перпендикулярную
, перпендикулярную  , а из полюса
, а из полюса  - линию в направлении скорости
- линию в направлении скорости  , параллельную
, параллельную  . В пересечении указанных линий находим точку b. Вектор
. В пересечении указанных линий находим точку b. Вектор  изображает скорость точки В, а вектор
изображает скорость точки В, а вектор  - скорость . Величины действительных скоростей определяют по формулам
- скорость . Величины действительных скоростей определяют по формулам
 (2.37)
(2.37)
Направление скорости  определяется при параллельном переносе вектора в точку В механизма (рис. 2.9, а). Т.к. вектор в точке В механизма направлен в сторону положительной полуоси , знак скорости будет положительным.
определяется при параллельном переносе вектора в точку В механизма (рис. 2.9, а). Т.к. вектор в точке В механизма направлен в сторону положительной полуоси , знак скорости будет положительным.
Модуль угловой скорости звена 2 будет
 (2.38)
(2.38)
Направление находится по вектору . На рис. 2.9, а направлена по часовой стрелке.
Скорость точки определяется с помощью векторного уравнения:
 (2.39)
(2.39)

Здесь скорость относительного движения точки  находится методом пропорционального деления отрезка ав на плане скоростей, изображающего относительную скорость
находится методом пропорционального деления отрезка ав на плане скоростей, изображающего относительную скорость
 (2.40)
(2.40)
Действительная скорость определяется как
 (2.41)
(2.41)
Вопросы для самоконтроля.
1. Каковы задачи кинематического анализа рычажных механизмов?
2. Что называется кинематическими параметрами и кинематическими характеристиками звеньев и характерных точек механизмов?
3. Какие известны методы кинематического анализа рычажных механизмов, их достоинства и недостатки?
4. Когда используют метод замкнутых векторных контуров и в чём он заключается?
5. Что представляет собой графоаналитический метод кинематического анализа рычажных механизмов?
6. Что должно быть известно для построения планов скоростей рычажных механизмов?
7. Как определяется масштабный коэффициент плана скоростей?
8. Что называют переносным движением шатуна в кривошипно-ползунном механизме, в котором ведущее звено-кривошип?
9. Что называют относительным движением шатуна в кривошипно-ползунном механизме (ведущее звено-кривошип)?
10. Как определить значение и направление угловых скоростей звеньев механизма?
|
|
|
|
|
Дата добавления: 2014-01-15; Просмотров: 1459; Нарушение авторских прав?; Мы поможем в написании вашей работы!