КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Модели машин
|
|
|
|
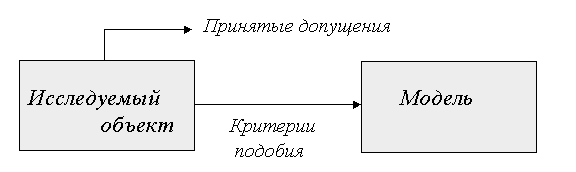 |
Модель (от лат. modulus - мера, образец) - устройство или образ (мысленный или условный: схема, чертеж, система уравнений и т.п.) какого-либо объекта или явления (оригинала данной модели), адекватно отражающей его исследуемые свойства и используемый в качестве заместителя объекта в научных или иных целях (рис.).
Виды моделей:
1.По форме представления:
- физические;
- математические:
-- аналоговые;
-- цифровые.
2. По назначению:
- функциональные;
- структурные;
- геометрические;
- кинематические;
- динамические.
3. По методу исследования:
- графические;
- численные;
- графо-аналитические;
- энергетические;
- кинетостатические[1];
- экспериментальные.
Классификация механизмов.
Механизмы классифицируются по следующим признакам:
1. По области применения и функциональному назначению:
- механизмы летательных аппаратов;
- механизмы станков;
- механизмы кузнечных машин и прессов;
- механизмы двигателей внутреннего сгорания;
- механизмы промышленных роботов (манипуляторы);
- механизмы компрессоров;
- механизмы насосов и т. д.
2. по виду передаточной функции на механизмы:
- с постоянной передаточной функцией;
- с переменной передаточной функцией:
-- с нерегулируемой (синусные, тангенсные);
-- с регулируемой:
--- со ступенчатым регулированием (коробки передач);
--- с бесступенчатым регулированием (вариаторы).
3. по виду преобразования движения на механизмы, преобразующие:
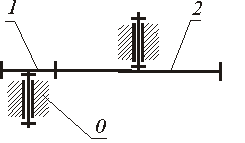
- вращательное во вращательное:
-- редукторы  ;
;
-- мультипликаторы  ;
;
-- муфты  ;
;
- вращательное в поступательное;
- поступательное во вращательное;
- поступательное в поступательное.
4. по движению и расположению звеньев в пространстве:
- пространственные;
- плоские;
- сферические.
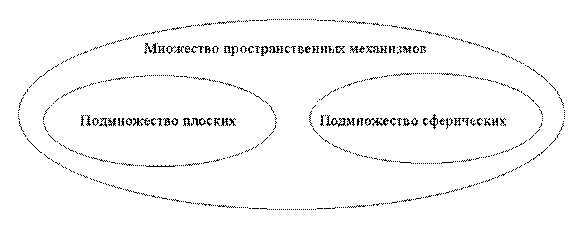 |
Все механизмы являются пространственными механизмами, часть механизмов, звенья которых совершают движение в плоскостях параллельных одной плоскости, являются одновременно и плоскими, другая часть механизмов, звенья которых движутся по сферическим поверхностям эквидистантными какой-либо одной сфере, являются одновременно и сферическими.
5. по изменяемости структуры механизма на механизмы:
- с неизменяемой структурой;
- с изменяемой структурой.
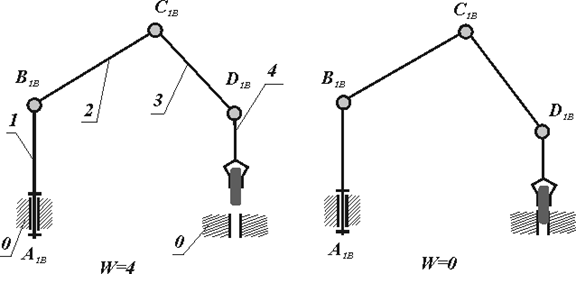 |
В процессе работы кривошипно-ползунного механизма насоса его структурная схема все время остается неизменной. В механизмах манипуляторов в процессе работы структурная схема механизма может изменяться (рисунок). Так, если промышленный робот выполняет сборочные операции, например, вставляет цилиндрическую деталь в отверстие, то при транспортировке детали его манипулятор является механизмом с открытой или разомкнутой кинематической цепью. В тот момент, когда деталь вставлена в отверстие, кинематическая цепь замыкается, структура механизма изменяется, подвижность уменьшается на число связей во вновь образованной кинематической паре деталь-стойка.
Структура манипулятора изменяется и тогда, когда в одной или нескольких кинематических парах включается тормоз. Тогда подвижное соединение двух звеньев заменяется неподвижным, два звена преобразуются в одно.
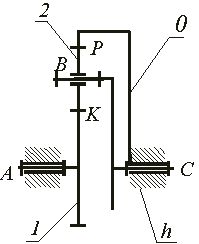
6. по числу подвижностей механизма:
- с одной подвижностью W=1;
- с несколькими подвижностями W>1:
-- суммирующие (интегральные);
-- разделяющие (дифференциальные).
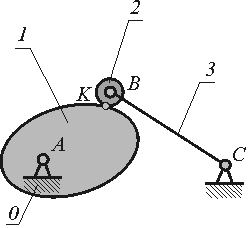
7. по виду кинематических пар (КП):
- с низшими КП (все КП механизма низшие);
- с высшими КП (хотя бы одна КП высшая);
- шарнирные (все КП механизма вращательные - шарниры).
8. по способу передачи и преобразования потока энергии:
- фрикционные (сцепления);
- зацеплением;
- волновые (создание волновой деформации);
 - импульсные.
- импульсные.
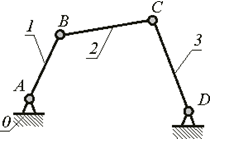
9. по форме, конструктивному исполнению и движению звеньев:
- рычажные;
 - зубчатые;
- зубчатые;
 - кулачковые;
- кулачковые;
- планетарные;
- манипуляторы (рисунок см. ранее).
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 400; Нарушение авторских прав?; Мы поможем в написании вашей работы!