КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Определение момента инерции маховика методом Виттенбауэра
|
|
|
|
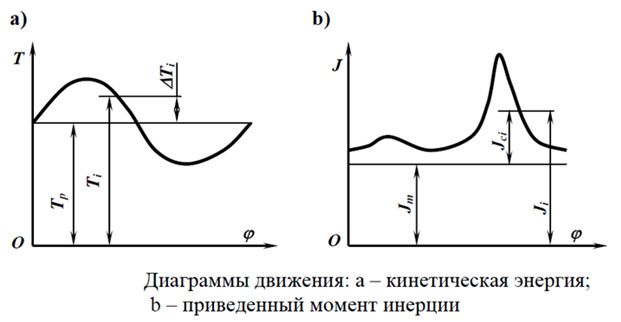
∆ Т – приращение кинетической энергии за счет разности работ движущих сил и сил сопротивления за период установившегося движения (рисунок, а).

где Тр – кинетическая энергия разгона, Jm – момент инерции маховика, Jсi – собственный приведенный момент инерции звеньев механизма.
Здесь Jm – не известен, Тр – не известна, но Jс = f (φ) можно построить, построив планы скоростей во всех положениях механизма и определив кинетическую энергию всех звеньев механизма для каждого из 12 положений.
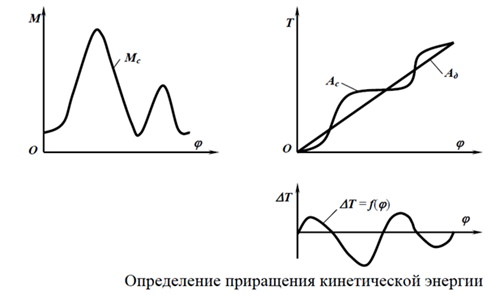
Можно построить также диаграмму ∆ Т = f (φ), построив диаграмму моментов сил сопротивления и движущих сил. Разность этих работ и даст значения ∆ T для каждого положения (рисунок ниже).
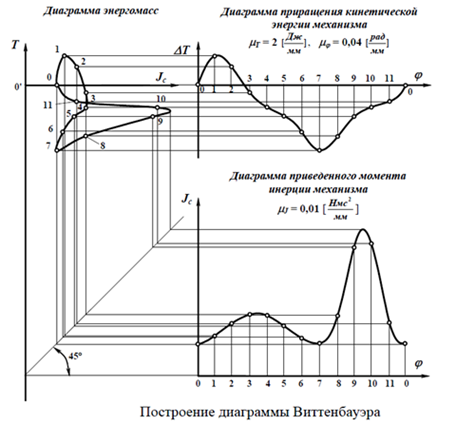

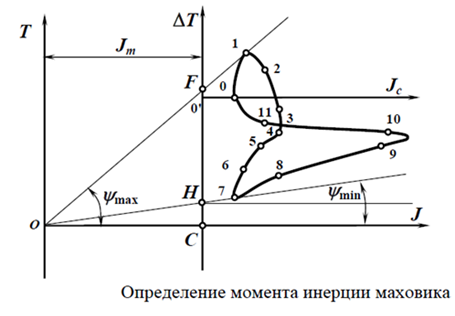
Проводим касательные к диаграмме под углами ψmах и ψmin. Точка пересечения касательных даст начало системы координат TOJ.
[1] Кинетоста́тика (от греч. kinetós — движущийся и статика) — раздел механики, в котором рассматриваются способы решения динамических задач с помощью аналитических или графических методов статики. В основе кинетостатики лежит принцип Д’Аламбера, согласно которому уравнения движения тел можно составлять в форме уравнений статики, если к фактически действующим на тело силам и реакциям связей добавить силы инерции.
[2] Леони́д Влади́мирович Ассу́р (31 марта 1878, Рыбинск — 19 мая 1920, Воронеж) — русский и советский механик и машиновед, труды которого по кинематике и динамике механизмов заложили теоретические основы советской школы по теории механизмов и машин.
[3] ψ – пси.
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 1702; Нарушение авторских прав?; Мы поможем в написании вашей работы!