КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Датчики температуры
|
|
|
|
Существует два основных метода измерения температуры: равновесный и прогнозируемый. В равновесном методе измерение температуры проводится, когда между измеряемой поверхностью и чувствительным элементом, находящимся в зонде, наступает тепловое равновесие, т.е. между датчиком и объектом измерения нет существенной разности температур. В методе прогнозирования в процессе проведения измерений тепловое равновесие не наступает, а значение текущей температуры определяется по скорости изменения температуры датчика. С момента размещения чувствительного элемента на объекте до наступления теплового равновесия между объектом и датчиком может пройти довольно много времени, особенно, если контактные площадки сухие. Например, медицинский электронный термометр определяет температуру в ванне с водой за 10 секунд, в то время как для измерения подмышечной температуры требуется, по крайней мере, 3...5 минут.
Рассмотрим источники возможных ошибок при измерении температуры контактным способом. Одна из причин возникновения ошибок заключается в том, что датчик, как правило, соединяется не только с объектом, температуру которого он измеряет, но и с другими предметами. Другая причина кроется в использовании соединительных кабелей (рис. 16.1А). Чувствительный элемент, подсоединяемый к объекту с температурой Тв, обладает своей собственной температурой Ts. Для проведения точных измерений необходимо достичь состояния теплового равновесия, при котором эти две температуры станут практически равными. Один конец кабеля соединяется с зондом, а другой конец подвергается действию температуры окружающей среды To, которая может значительно отличаться от температуры объекта. Таким образом, соединительный кабель не только передает электрический сигнал датчика, но и часть тепла от элемента или к нему. На рис. 16.2Б показана тепловая схема, включающая в себя объект, датчик, окружающую среду и тепловые сопротивления r1 и r2, которые отображают способность вещества проводить тепловую энергию и определяются как величины, обратные коэффициентам теплопроводности, т.е. r=1/a. Если объект теплее окружающей среды, тепловой поток будет направлен туда, куда указывает стрелка.
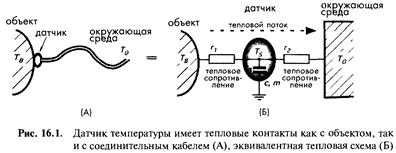
Схема на рис. 16.1Б напоминает электрическую схему, и для расчета ее параметров также применяются законы электрических цепей, такие как законы Кирхгофа и Ома (Интересно отметить, что закон Кирхгофа был первоначально выведен не для электрической цепи, а для водопровода). Теплоемкость вещества, по аналогии с электрическими цепями, отображается в виде конденсатора. Считая, что все температуры уже вышли на определенный стационарный уровень, к этой системе можно применить закон сохранения энергии, из которого следует, что тепловая энергия, переданная объектом датчику, должна быть равна энергии, отданной датчиком в окружающую среду Исходя из этого, можно записать следующее уравнение:

Из которого можно вывести выражение для температуры датчика:

где DT — разность температур между объектом и окружающей средой. Подробнее рассмотрим уравнение (16.2). Анализируя его, можно сделать несколько заключений. Во-первых, температура датчика всегда отличается от температуры объекта. Исключение составляет случай, когда температуры окружающей среды и объекта равны (т.е. DT=Tв—Tо=0). Во-вторых, при любом DТ температура датчика будет приближаться к температуре объекта только в том случае, когда отношение r1/r2 стремится к нулю. Это означает, что для снижения погрешности измерения необходимо улучшать тепловую связь между объектом и датчиком и, по возможности, отделять датчик от окружающей среды, что часто очень нелегко выполнить.
Все вышесказанное справедливо для стационарных условий. Теперь рассмотрим динамический процесс, когда температура меняется во времени. Такая ситуация происходит при изменении температуры окружающей среды или объекта, а также в момент присоединения датчика к объекту, когда его температура еще не успела стабилизироваться. При контакте чувствительного элемента с объектом между ними происходит теплообмен. Количество переданного при этом тепла определяется разностью температур элемента (Ts) и объекта (Тв):

где a1=l/r1 — теплопроводность в зоне контакта датчика и объекта. Если удельная теплоемкость датчика равна с, а масса — m, количество поглощенного им тепла можно найти из выражения:


Типовой контактный датчик температуры состоит из следующих компонентов (рис. 16.3А):
1. Чувствительного элемента: материала, реагирующего на изменение его собственной температуры. Хороший элемент обладает низкой удельной теплоемкостью, малой массой, большой теплопроводностью, высокой и прогнозируемой чувствительностью
2. Контактов: проводящих пластинок или проводов, связывающих чувствительный элемент с внешней электронной схемой. Контакты должны обладать минимально возможными теплопроводностью и электрическим сопротивлением. Также они часто выполняют роль опорной конструкции.
3. Защитного корпуса: специальной оболочки или покрытия, физически разделяющего чувствительный элемент от окружающей среды. Хороший корпус имеет низкое тепловое сопротивление (высокую теплопроводность) и хорошие диэлектрические свойства. Он должен быть влагонепроницаемым, чтобы вода и другие факторы окружающей среды не могли сказаться на работе чувствительного элемента.
На рис. 16.3Б показан бесконтактный датчик температуры, представляющий собой оптический детектор теплового излучения, подробно описанный в главе 14. В его состав также входит чувствительный элемент, реагирующий на изменение собственной температуры. Основное отличие контактных и бесконтактных датчиков заключается в способе передачи тепла от объекта к элементу: в контактных датчиках задействован механизм теплопроводности через физический контакт, в бесконтактных тепло передается через излучение или оптическим методом.
Для улучшения быстродействия датчиков тепловых излучений толщину чувствительного элемента делают минимальной, в то время как для повышения чувствительности увеличивают его площадь поверхности. В дополнение к чувствительному элементу в состав бесконтактного теплового датчика может входить оптическое окошко и встроенная интерфейсная схема. Внутренняя часть корпуса датчика обычно заполняется сухим воздухом или азотом.
Все датчики температуры можно разделить на два класса: абсолютные и относительные детекторы. Абсолютные датчики измеряют температуру относительно либо абсолютного нуля, либо любой другой точки на температурной шкале, например, относительно 0°С (273.15°К), 25°С и т.д. Примерами абсолютных датчиков являются термисторы и резистивные детекторы температуры (РДТ). Относительные датчики измеряют разность температур двух объектов, один из которых называется эталонным. Типичным представителем относительных датчиков является термопара.
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 992; Нарушение авторских прав?; Мы поможем в написании вашей работы!