КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Вторичные приборы систем автоматического контроля и регулирования
|
|
|
|
В системах автоматического контроля и регулирования технологических процессов термической обработки первичные приборы (датчики) используются в комплекте со вторичными измерительными, самопишущими и регулирующими приборами (милливольтметры, логометры, электронные приборы). Наиболее совершенными и распространенными вторичными приборами являются автоматические электронные приборы.
Промышленностью выпущено большое число различных типов вторичных электронных приборов и их модификаций (табл. 7), которые можно классифицировать по следующим признакам:
по функциональному назначению на показывающие (ЭПВ2 — электронный потенциометр с вращающейся шкалой; ЭМВ2 — электронный мост; ПП4 — потенциометр показывающий; МП4 — мост показывающий; А501 — потенциометр аналоговый показывающий, одношкальный; А511 — потенциометр миогошкаль-ный); показывающие и регулирующие (ППР4, МПР4, КПП1, КПМ1, КПУ1); показывающие и самопишущие (регистрирующие) типов ПС1, МС1, ПСМ2, МСМ2, ДСМ2, А542, А543; показывающие, самопишущие и регулирующие (ЭПП, ЭМП, ЭПД, ЭМД, ЭП, ЭМ, ПЭД-250, МЭД-250, ПСР1, МСР1, ДСР1, ПМСР2, МСМР2, ДСМР2, КС1, КС2, КСЗ, КС4);
по конструктивным характеристикам на приборы нормального габарита (длина шкалы до 280 мм); малогабаритные (длина шкалы 150—210 мм) и миниатюрные (длина шкалы 100—120 мм); приборы с диаграммной бумагой в виде ленты (ЭПП, ЭМП, ПС1, МС1, ДС1, ПСМ2, МСМ2, Ш, КС2, КС4, А542 и др.); приборы с диаграммной бумагой в виде диска (ЭПД, ЭМД, ПЭД-250, МЭД-250, ЭПИД, КСЗ и др.);
по типу измерительной схемы на потенциометры, уравновешенные мосты, приборы с дифференциально-трансформаторными или ферродииамическими преобразователями;
по классу точности на прецизионные (класс точности 0,25 и выше), средней точности (классы точности 0,5 и 1,0) и низкой точности (класс точности 1,5 и ниже);
по времени прохождения указателем всей шкалы на быстродействующие (0,25—0,5 с), среднего быстродействия (1 —10 с), низкого быстродействия (более 10 с).
Вторичные приборы, обеспечивающие регулирование измеряемого параметра, классифицируют также по типу регулирующего устройства.
В настоящее время выпускают автоматические электронные приборы серии К (КП — показывающие, KB — показывающие с вращающейся шкалой и КС — самопишущие), имеющие следующие обозначения: КПП, КВП, КСП — потенциометры; КПМ, КВМ, КСМ — уравновешенные мосты; КСД — приборы с дифференциально-трансформаторным преобразователем; КСФ — приборы с ферро-динамическим преобразователем; КПУ, КВУ, КС У — приборы унифицированного электрического сигнала.
Миниатюрные электронные показывающие приборы типа КП1 (КПП1, КПМ1, КПУ1), выпускаемые заводом «Автоматика» (Кировокан), предназначены взамен приборов типа ПП и МП. Приборы типа КС1 (КСП1, КСМ1, КСУ1) с ленточной диаграммой (одноточечные) заменяют приборы типа ПСМ, МСМ. Приборы малогабаритные типа КС2 (КСП2, КСМ2, КСД2, КСУ4) с ленточной диаграммой выпускаются заводом «Львовприбор» взамен приборов ПС и МС. Автоматические приборы типа КСЗ с дисковой диаграммой, выпускаемые заводом «Теплоприбор» (Челябинск), и КС4 с ленточной диаграммой, изготовляемые на заводе «Манометр» (Москва), заменяют приборы ЭПД, ЭМД, ЭПП, ЭМП.
В промышленности применяют вторичные приборы с потенциометрической (электронные потенциометры), мостовой (электронные уравновешенные мосты), дифференциально-трансформаторной и ферродинамической измерительными схемами.
Автоматические электронные потенциометры. Эти потенциометры предназначены для контроля, записи и регулирования (при наличии регулирующего устройства) температуры и других параметров, преобразованных в напряжение постоянного тока.
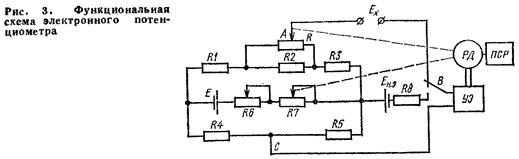
Принцип действия автоматического потенциометра (рис, 3) состоит в следующем: измеряемая ТЭДС термопары (телескопа радиационного пирометра) или напряжение постоянного тока Ех алгебраически суммируется с напряжением между точками А к С измерительной диагонали АС, Результирующий сигнал (сигнал рассогласования) подается на вход электронного усилителя УЭ, на выходе которого включен реверсивный двигатель РД. Ротор двигателя кинематически связан с движком А реохорда R. В зависимости от величины и знака сигнала рассогласования реверсивный двигатель перемещает в ту или другую сторону движок Ау изменяя напряжение между точками Л и С до момента компенсации. Одновременно с движком реохорда двигатель перемещает по шкале показывающую стрелку или перо (каретку) прибора, а также воздействует на сигнализирующее или регулирующее устройство (СР), если они имеются.
В электронных потенциометрах с измерительной схемой, питающейся от сухой батареи Е, контроль величины рабочего тока осуществляется вручную или автоматически. При этом электронный усилитель включается последовательна {переключатель В в нижнем положении) с цепью нормального элемента Еа.э. имеющего постоянную по величине ЭДС. Одновременно происходит механическое сцепление движка реостата R7 с ротором двигателя РД. Если падение напряжения на сопротивлении R5 не равно ЭДС нормального элемента, то на вход УЭ подается разность напряжений, приводящая во вращение двигатель РД. Последний переместит движок реостата R7 и установит требуемое значение рабочего тока в измерительной цепи.
В современных потенциометрах питание измерительной схемы осуществ-вляется от стабилизированного источника питания типа ИПС, обеспечивающего постоянство рабочего тока и напряжения.
Потенциометры ЭПП, ЭПД> ЭПВ, ПП, ПЭП-250, ПС, П, ПСМ и др. в настоящее время заменяются новыми приборами серии К типов КВП» КПП, КСП, КСУ (см. табл. 7). Приборы типа КСУ предназначены для работы в комплекте с датчиками унифицированного сигнала тока (ДТС) и напряжения (ДНС),
Автоматические электронные уравновешенные мосты. Принцип работы их состоит в автоматическом уравновешивании мостовой схемы в комплекте с электрическими термометрами сопротивления.
Промышленностью выпускаются мосты серии К (типов КПШ, КСМ1, КСМ2, КСМЗ и КСМ4), а также используются раиее выпущенные приборы типов МСМ, МСМР, МП4, МПРЗ, МС, МСР, ЭМВ, ЭМД, ЭМП и др. (см. табл. 7).
Автоматические электронные приборы с дифференциально-трансформаторным преобразователем в измерительной схеме (рис. 4).
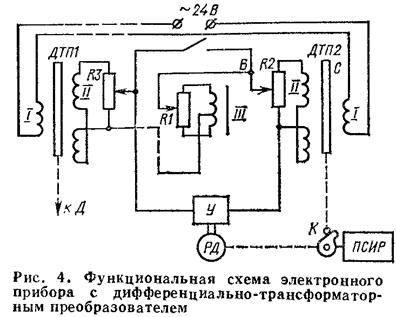
Такие приборы получили широкое применение для контроля, записи и регулирования расхода жидкости и газа, разности давлений, избыточного давления, уровня жидкости и других величин. Первичные обмотки / преобразователей датчиков ДТП1 и ДТП2 прибора соединены последовательно. Вторичные обмотки // преобразователей, состоящие из двух секций, соединены навстречу друг другу. Сердечник преобразователя ДТП1 механически связан с чувствительным элементом датчика (Д). Сердечник преобразователя ДТП2 вторичного прибора перемещается кулачком К, вращаемым реверсивным двигателем РД. При питании первичных обмоток преобразователей напряжением переменного тока во вторичных обмотках индуктируются переменные напряжения, величина и фаза которых зависит от положения сердечников преобразователей. Сумма напряжений вторичных обмоток преобразователей подается на вход усилителя У. При одинаковом расположении сердечников преобразователей сумма напряжений вторичных обмоток равна нулю. При изменении измеряемого параметра в результате перемещения сердечника ДТП1 на вход усилителя поступает сигнал рассогласования. В зависимости от величины и знака сигнала реверсивный двигатель через кулачок переместит в соответствующем направлении сердечник ДТП2 до момента уравновешивания схемы. Реверсивный двигатель связан с показывающей стрелкой и пишущим пером прибора, а также с интегрирующим и регулирующим устройствами (ПСИР). Дополнительная обмотка /// и переменное сопротивление R1 предназначены для корректировки вторичного напряжения при среднем положении сердечника преобразователя датчика.
В промышленности применяются приборы с вращающимся циферблатом типа ЭИВ2; показывающие и самопишущие одноточечные с дисковой диаграммой типа ЭПИД; показывающие и самопишущие типа ДС1 и ДСР1; показывающие и самопишущие миниатюрные типа ДСМ2 и ДСМР2, а также новые приборы типа КСД2 (см. табл. 7).
Автоматические электронные приборы сферродинамическим преобразователем в измерительной схеме (рис. 5).
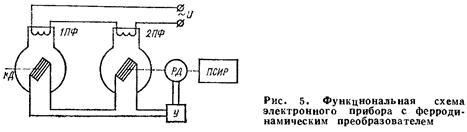
Они предназначены для контроля, записи и регулирования давления, расхода, уровня и других параметров. Обмотки возбуждения преобразователей датчика 1ПФ и 2ПФ электронного прибора соединены последовательно и питаются переменным током. Рамка преобразователя 1ПФ связана с чувствительным элементом датчика Д, а рамка преобразователя 2ПФ поворачивается реверсивным двигателем РД. Рамки преобразователей соединены между собой последовательно и подключены на вход усилителя У. Если рамки преобразователей повернуты на одинаковый угол, то их сумма напряжений равна нулю. При отклонении измеряемого параметра изменяется угол поворота рамки 1ПФ, и на вход усилителя поступает сигнал рассогласования. В зависимости от величины и знака сигнала реверсивный двигатель поворачивает рамку 2ПФ на определенный угол в соответствующем направлении, обеспечивая уравновешивание схемы. Одновременно двигатель перемещает показывающую стрелку и пишущее перо, а также воздействует на интегрирующее и регулирующее устройства (ПСИР), если они имеются.
В промышленности используют приборы ВСФ, КСФ2 и КСФЗ (см. табл. 7).
|
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 8563; Нарушение авторских прав?; Мы поможем в написании вашей работы!