КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Принцип действия систем автоматического управления
|
|
|
|
Библиографический список
Объект управления и присоединенные к нему измерители и управляющие устройства образуют автоматическую систему.
Совокупность этих устройств образует замкнутый контур, охватывающий объект управления.
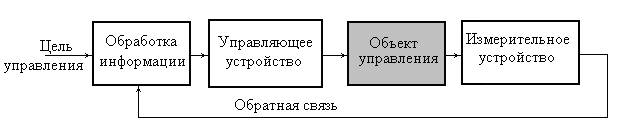
В устройстве обработки информации формируется сигнал для управляющего устройства, изменяющий состояние объекта управления в требуемом направлении.
В принципе система управления может быть и разомкнутой.
Например, требуется управлять угловой скоростью ω на выходе систем, представленной на рисунке.
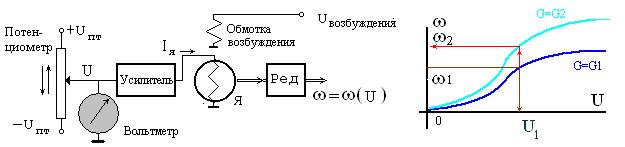
Имеется зависимость ω=ω(U,G) при некоторых внешних условиях G=G1 (температуре, моменте трения, момент нагрузки и др.).
Пусть требуется установить ω=ω1. Устанавливая по имеющейся зависимости значение U1, получаем ω1=ω(U1,G1). Однако, равенство ω=ω1 будет выполняться, только если G=G1. При отклонении условий от заданных(G=G2) угловая скорость будет отличаться от ω1
Влияние внешних условий можно исключить, измеряя фактическую угловую скорость тахометром и корректируя ω по результатам измерения. Для этого введем обратную связь через оператора, который считывает показания тахометра и изменяет напряжение U для достижения требуемого значения ω.

Дальнейшим развитием идеи обратной связи является исключение из системы оператора. Таким образом, получается замкнутую автоматическую системы управления угловой скоростью двигателя
И, наконец, имея зависимость Uтах=k∙ω, можно отградуировать потенциометр: ввести зависимость U=U(ω) и задавать угловую скорость ω независимо от внешних условиях G.
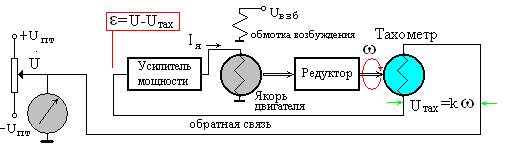
Усиленная разность ε=U-Uтах обеспечивает вращение выходной оси редуктора с требуемой угловой скоростью ω. Чем больше коэффициент усиления системы, тем меньше ε и тем точнее соответствует фактическая величина ω функции ω=ω(U).
|
|
|
Если данная система предназначена для регулирования угловой скорости ω на выходе редуктора в зависимости от входного напряжения U (задающего воздействия). то говорят о следящей системе - система следит за изменением задающего воздействия (в данном случае – напряжения U).
К следящим системам относятся, например, системы углового сопровождения целей, системы слежения за дальностью до цели.
Если ставится задача поддерживать постоянную угловую скорость ω при изменении G то говорят о системе стабилизации – система поддерживает заданное значение ω при изменении возмущающих воздействий G.
К системам стабилизации относятся, например, стабилизированные источники питания.
Структурная схема простейшей системы автоматики.

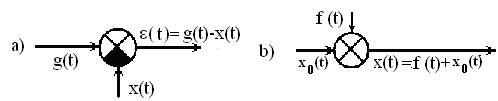
В структурных схемах САУ приняты обозначения:
Элемент сравнения сигналов – образует разность сигналов (рис.а) и элемент суммирования сигналов – образует сумму сигналов (рис.b):
Примеры простейших систем с обратной связью.
Усилитель, охваченный обратной связью с коэффициентом передачи β – на вход системы подается выходной сигнал, умноженный на коэффициент β и вычитается из входного сигнала (отрицательная обратная связь).
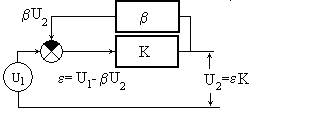

При β=1
 .
.
При K>>1 Kос→1.
Если выходной сигнал суммировать с входным сигналом, то отрицательная обратная связь превращается в положительную и при β∙K=1 имеем
и при β∙K→1 Кос неограниченно возрастает, что означает потерю устойчивости системы.
В общем случае, в цепях прямой и обратной связи могут быть включены и комплексные сопротивления.
Операционный усилитель, охваченный обратной связью.
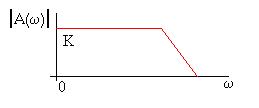
Примерный вид амплитудной частотной характеристики усилителя (отметим, что |A(0)|=K).
|
|
|
Рассмотрим следующую схему включения, где Z1 и Z2, в общем случае, комплексные сопротивления:
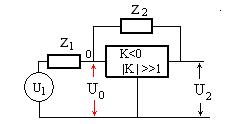
Поскольку K<0 (напряжения U1и U2 имеют разные знаки), а |K|>>1, то напряжение в точке 0 U0=U2/K . Следовательно,
. Следовательно,
 .
.
Эти соотношения, естественно, справедливы при пределах линейности усилителя.
2) Примеры систем автоматического управления
1) Центробежный регулятор скорости вращения паровой машины (регулятор Уатта). Это система стабилизации.
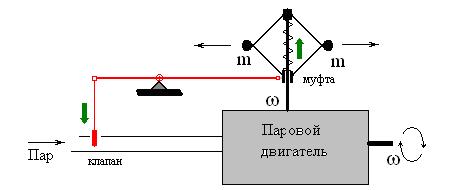
При увеличении скорости вращения вала (ω) массы m раздвигаются, муфта перемещается вверх, подача пара в двигатель уменьшается клапаном, скорость вращения вала уменьшается. Так осуществляется отрицательная обратная связь.
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 457; Нарушение авторских прав?; Мы поможем в написании вашей работы!