КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основные функции и структура АСУТП
|
|
|
|
Основным назначением АСУТП является оптимизация технологических процессов в соответствии с заданным критерием эффективности. При этом предполагается, что автоматизация с помощью АСУТП приведет к повышению эффективности производства в заданном отношении. В противном случае АСУТП просто не применяется. Строго сформулированную зависимость между параметрами техпроцесса и критерием его оптимальности называют целевой функцией. Обычно полагают, что оптимальный режим достигнут, если выбранному сочетанию параметров управляемого техпроцесса соответствует минимум (а иногда максимум) целевой функции. Если из-за технологических ограничений заданный экстремум целевой функции не может быть достигнут, то оптимальный режим имеет мест при некоторых граничных значениях контролируемых параметров.
В любом случае оптимизация техпроцесса с помощью АСУТП сводится к поддержанию оптимального соотношения его пара* метров. Если это соотношение стабильно и может быть рассчитано или подобрано заранее, то достаточно, чтобы АСУТП стабилизировала значения контролируемых параметров на заданном оптимальном уровне. Обычно к тому же необходимо изменять значения заданных параметров по заранее составленной программе ведения техпроцесса. В наиболее сложных случаях оптимальный ход техпроцесса не может быть определен и задан заранее, тогда поиск оптимального режима работы производится автоматически, самой АСУТП, в течение всего времени техпроцесса. Методика поиска зависит от вида заданной целевой функции и ограничений, накладываемых на значения контролируемых параметров.
В зависимости от имеющихся возможностей достижения оптимального режима в АСУТП применяются следующие приемы управления технологическими процессами (ТП):
· стабилизация заданных значений параметров ТП при различных возмущениях. Примером такой стабилизации может служить стабилизация линейной скорости шлифования при уменьшении диаметра шлифовального круга;
· изменение параметров ТП по заранее подготовленной на специальном программном носителе программе, включая управление технологическим циклом. Такие АСУТП относятся к классу систем программного управления (СПУ). Реализация программного управления наряду со стабилизацией контролируемых параметров присуща всем АСУТП, особенно в станках с числовым программным управлением (ЧПУ), лифтовых подъемниках, роботах-манипуляторах и др.;
· автоматическая оптимизация ТП во время выполнения заданной производственной программы и в соответствии с заданным критерием эффективности (целевой функцией). Типичными процессами, нуждающимися в автоматической оптимизации, являются раскрой материалов из заготовок со значительным разбросом по размеру и составление оптимальных смесей из исходных веществ со значительным разбросом по составу.
Управляющие устройства АСУТП строятся на базе средств микропроцессорной вычислительной техники и являются по существу управляющими вычислительными машинами (УВМ).
Технологические объекты, управляемые АСУТП — это совокупность сложных электромеханических систем, таких как станки ЧПУ, робототехнические комплексы, прокатные сданы, трубопроводные системы и др. Отдельные единицы оборудования, входящие в состав ТО, управляемою АСУТП, имеют автономные системы управления, позволяющие как встраивать данное оборудование в технологический комплекс, так и использовать его автономно.
По указанной причине управление в АСУТП организуется по иерархическому принципу. Иерархическое управление является одной из разновидностей централизованного управления. При управлении по иерархическому принципу система управления подразделяется на отдельные уровни, или ранги. Общее управление осуществляется центральной управляющей вычислительной машиной (ЦУВМ), которая считается УВМ высшего (первою) ранга. Однако ЦУВМ при иерархическом управлении управляет ТО не непосредственно, а только через промежуточные, локальные, управляющие вычисли тельные машины (ЛУВМ).
Все ЛУВМ. управляемые непосредственно от ЦУВМ, называются УВМ второго ранга (второго уровня управления). Если имеются ЛУВМ. управляемые не от ЦУВМ, а от УВМ второю ранга. го такие ЛУВМ называются ЛУВМ третьего ранта. По отношению к ним соответствующая УВМ второго ранга оказывается центральной. В результате при управлении по иерархическому принципу каждая УВМ управляет лишь управляющими устройствами ближайшего низшего ранга, а подчиняется лишь одной из УВМ ближайшего высшего ранта. Исключение составляет самый нижний уровень управления, на котором осуществляется непосредственное управление ТО, т.е. не управляющими, а исполнительными устройствами.
Для АСУТП типична трехуровневая иерархическая структура. представленная на рис. 1. Здесь ЦУВМ, которая является достаточно мощным промышленным компьютером, снабжает управляющими программами N ЛУВМ. а последние управляют исполнительными электроприводами (например. М электроприводов) через системы управления электроприводами (СУЭП) или другими исполнительными устройствами.
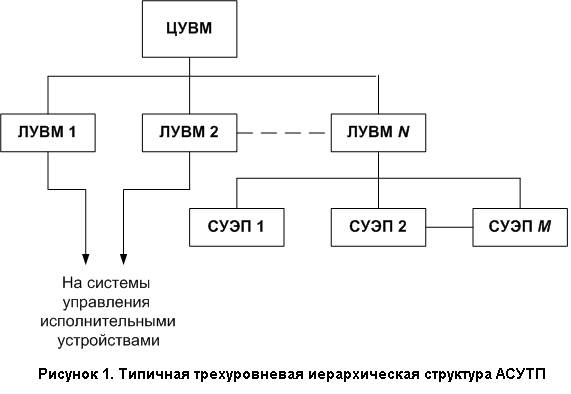
ЛУВМ могут строиться на базе компьютеров, программируемых логических контроллеров и микроконтроллеров в зависимости от сложности решаемых задач управления. В качестве исполнительных устройств могут быть использованы не только электроприводы, но и нагревательные, электрофизические, электрохимические и другие установки. Системы управления исполнительных устройств могут быть построены как на базе микропроцессорных комплектов, так и без них, могут быть как цифровыми, так и аналоговыми.
На рисунке 1 показано прохождение лишь прямых управляющих сигналов, а описание каналов обратной связи от ТО к АСУТП будет приведено далее. Прохождение сигналов обратной связи строится также по иерархическому принципу: от исполнительных устройств и агрегатов информация поступает сначала в ЛУВМ по результатам опросов датчиков, установленных на технологическом оборудовании, а ЦУВМ получает необходимую информацию о состоянии технологического объекта в порядке обмена информацией с ЛУВМ.
|
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 1693; Нарушение авторских прав?; Мы поможем в написании вашей работы!