КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Системы распознавания образов
|
|
|
|
СИСТЕМЫ АВТОМАТИЧЕСКОГО КОНТРОЛЯ И ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ. СИСТЕМЫ РАСПОЗНАВАНИЯ ОБРАЗОВ
Резистивный газовый анализ
Резистивный измерительный преобразователь концентрации кислорода, такой, например, как преобразователь на основе окиси титана, может служить основой анализатора выхлопных газов. Окись титана представляет собой вещество, сопротивление которого изменяется в зависимости от числа молекул кислорода, абсорбированных на его поверхности.
Преобразователь изготавливается из платиновой проволоки или тонкопленочного резистора, поверхность которого покрывается окисью титана. В зависимости от содержания кислорода в выхлопном газе слой окиси титана изменяет свое сопротивление и, следовательно, общее сопротивление прибора.
Для определения содержания иных газов применяются другие вещества. Существуют также преобразователи для обнаружения пропана и метана. В резистивных преобразователях имеются два элемента: один покрытый веществом, а другой — непокрытый. Он используется как температурный компенсирующий элемент, когда измерения осуществляются с преобразователем, включенным в мостовую схему.
ЛЕКЦИЯ 15
План лекции:
1. Системы автоматического контроля и технической диагностики. Системы распознавания образов
Общие понятия. Системы автоматического контроля (САК) и системы технической диагностики (СТД) являются разновидностями ИИС, с помощью которых осуществляется контроль за состоянием различных объектов.
Отличием СТД от САК является то, что СТД не только выдает информацию исправности или неисправности контролируемого объекта, но и указывает место неисправности. Практически лю- бая СТД имеет в своем составе устройство воздействия на объект в виде генераторов стимулирующих воздействий, в то время как САК может не иметь таких устройств.
Системы автоматического контроля. Современные САК делят на системы, в которых осуществляется непрерывный контроль параметров объекта, и системы с дискретным последовательным контролем этих параметров. Система с непрерывным контролем параметров объекта, структурная схема канала которой представлена на рис.65, содержит в каждом канале контроля сравнивающее устройство СУ и устройство индикации отклонений ИО, причем число этих устройств в каждом канале зависит от числа установленных границ изменения параметра.
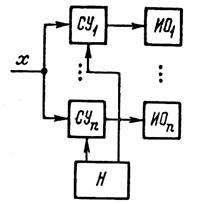
Рис.65 Структурная схема одного канала САК с непрерывным контролем.
Практически таких границ (норм) может быть от одной до четырех: предупредительная «меньше», предупредительная «больше», аварийная «меньше» и аварийная «больше». Устройство выработки и хранения норм Н может быть общим для многих каналов или индивидуальным для отдельных каналов. Системы с непрерывным контролем требуют большого количества оборудования и потому применяются только для контроля наиболее ответственных параметров, для которых необходимо обеспечить высокую надежность контроля и своевременность выдачи результата контроля.
Системы автоматического контроля с дискретным последовательным контролем являются наиболее распространенными. Они требуют меньшего количества оборудования и потому более дешевы. Структурная схема такой системы представлена на рис.66. Контролируемые величины, преобразованные в унифицированные сигналы, например напряжения U1- Un,через измерительный коммутатор ИК поочередно поступают на сравнивающее устройство СУ, где сравниваются с нормами. При наличии нескольких норм у одного контролируемого параметра норма может меняться во время контроля данного параметра. Изменение норм и переключение ИК осуществляется с помощью устройства управления УУ. Средство представления информации СПИ может содержать устройства индикации отклонений (общие, групповые или индивидуальные) и устройства цифровой регистрации. Кроме суждений о состоянии контролируемого параметра, СПИ также выдает и регистрирует номер контролируемого канала (от УУ) и время наступления события (от устройства формирования сигналов времени УФВ).
Недостаток этих систем — большая избыточность операций контроля, так как частота проведения контроля выбирается с учетом экстремальных динамических свойств контролируемых параметров. В то же время из-за недостаточности предварительных сведений о динамических свойствах объекта или невозможности построения САК в соответствии с этими экстремальными свойствами может возникнуть ситуация, когда один или несколько параметров выйдут за пределы норм вследствие ожидания обслуживания и может быть пропущен предаварийный или даже аварийный режим работы объекта.
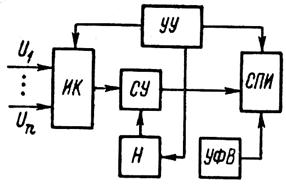
Рис.66 Структурная схема САК с дискретным контролем.
Выпускаемые промышленностью САК обычно являются комбинированными, т. е. наиболее важные параметры контролируются непрерывно, а по всем остальным параметрам осуществляется дискретный последовательный контроль.
Системы технической диагностики. По целевому назначению системы технической диагностики (СТД) делят на собственно диагностические и прогнозирующие. Собственно диагностические системы предназначены для установления диагноза, т. е. для обнаружения неисправности или подтверждения исправности проверяемого объекта. Прогнозирование является более трудной задачей и заключается в том, что по результатам проверки в предыдущие моменты времени предсказывается поведение объекта в будущем.
По характеру процедуры выработки оценки состояния объекта диагностики СТД делят на статистические и детерминированные. При статистической оценке состояния объекта решение выносится на основании измерений или проверок сигналов, характеризующих объект, а при детерминированной — параметры проверяемого объекта сравнивают с параметрами объекта, принятого за образцовый. Обычно вместо образцового объекта используют сигналы, имитирующие его поведение. Эти сигналы хранятся в соответствующих устройствах СТД.
Существуют следующие виды проверок: функциональная, алгоритмическая и логически-комбинационная. При функциональной проверке выявляют наличие сигнала на выходе объекта при поступлении сигнала на его вход; отсутствие выходного сигнала является отказом. При алгоритмической проверке в соответствии с алгоритмом работы объекта проверяется последовательность выполнения функций. Логически-комбинационная проверка, называемая также тестовой, позволяет обнаруживать неисправности на любом уровне. На вход проверяемого объекта в этом случае подают специальный диагностический тест, специальные стимулирующие сигналы.
Наиболее сложной задачей, возникающей при диагностике, является задача отыскания узла, вызвавшего неисправность. При этом каждая очередная проверка должна выполняться с учетом функциональной значимости каждого узла, относительных вероятностей возможных причин неисправности, относительных затрат времени, необходимого для осуществления проверки, а также полученной ранее информации. Существуют различные методы оптимизации программ диагностики, разработанные на основе указанных принципов.
Одна из возможных структурных схем системы технической диагностики представлена на рис.67.
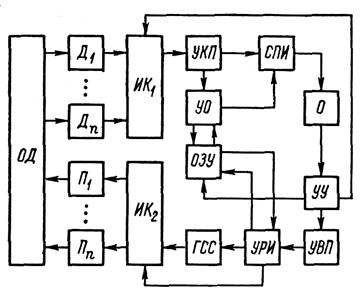
Рис.67 Структурная схема системы технической диагностики.
Информация от объекта диагностики ОД через датчики Д1 — Дn с унифицированными выходными сигналами и измерительный коммутатор ИК1 поступает на устройство контроля параметров УКП, содержащее устройства измерения и сравнения параметров с нормами. Результаты контроля поступают в устройство обработки УО, где могут сравниваться с образцовыми результатами, получаемыми из оперативного запоминающего устройства ОЗУ. Кроме того, в ОЗУ может быть записана программа проверки, поступающая от устройства ввода программы УВП через устройство распределения информации УРИ, которое управляет также работой генератора стимулирующих сигналов ГСС и измерительного коммутатора ИК2, на вход которого подаются напряжения от ГСС. Эти напряжения с выходов ИК2 преобразуются преобразователями П1 — Пn в соответствующие сигналы, воздействующие на ОД. Такими сигналами могут быть как электрические сигналы, так и неэлектрические. Представление информации оператору О осуществляется средством представления информации СПИ. В зависимости от полученной информации оператор через устройство управления УУ может воздействовать на УВП, изменяя программу проверки.
Распознавание образов применяется для автоматического распознавания печатных, рукописных и фотографированных знаков, текстов, рисунков и схем; для распознавания звуков речи, команд, передаваемых голосом; для выявления некоторых ситуаций в сложных технических комплексах, таких как критическое или аварийное состояние и т.д.
Главными целями распознавания образов являются расширение возможностей общения человека с машиной и расширение возможностей автоматизации путем освобождения человека-оператора от многих операций, которые ограничивают быстродействие, надежность и эффективность функционирования автоматизированных комплексов.
Распознавание определяется как процесс отнесения ситуаций, явлений, образов к одному из нескольких или многих заранее определенных классов на основе анализа их характеристик. При распознавании возникают взаимосвязанные задачи выбора параметров распознавания и задачи нахождения и оценки качества решающей функции.
Для выбора параметров предварительно выделяют совокупность параметров (признаков), характеризующих рассматриваемый образ. Эти признаки могут быть представлены в виде точки в многомерном пространстве, которое называется пространством объектов, а вектор  — вектором объекта.
— вектором объекта.
Задача нахождения решающей функции должна рассматриваться с учетом сведений об объектах. Она должна удовлетворять следующим условиям:
• ƒ() 0, если объект принадлежит к одному классу;
0, если объект принадлежит к одному классу;
• ƒ() < 0, если объект принадлежит к другому классу.
Следовательно, решающая функция позволяет найти гиперповерхность, разделяющую многомерное пространство на классы.
Широко применяемый непараметрический (адаптивный) метод распознавания базируется на итеративной процедуре оптимизации параметров распознавания.
На рис.68 приведена структурная схема системы распознавания образов.
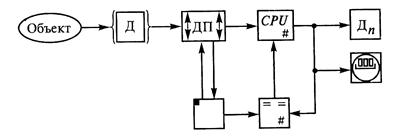
Рис.68 Структурная схема системы распознавания образов.
Детектор признаков (ДП) воспринимает физическое воздействие, характеризующее объекты, и выдает на выходе совокупность сигналов, несущих признаки (параметры) распознаваемого образа. В случае необходимости в ДП производится освобождение (фильтрация) от шумов (помех), нормализация по геометрическим размерам и положению (масштабирование), координатные преобразования и т.д.
Детектор признаков во многих случаях выполняется в виде рецепторного фотоэлектронного поля с системой развертки для распознавания образов или микроЭВМ.
В блоке памяти хранятся программы исходных, промежуточных и конечных данных, а также программы функционирования. Особенность его состоит в необходимости хранения описаний распознаваемых классов и запоминания значений оптимизируемых параметров классификатора. Блок памяти может содержать оптические маски, магнитные барабаны, аналоговую память и т.д.
Решение о принадлежности совокупности объектов (образа) к одному из заранее определенных классов принимает классификатор CPU. Это осуществляется в соответствии с принятым критерием распознавания или правилом решения в его устройстве на основе сигналов, выдаваемых детектором признаков. Критерием распознавания называется правило, по которому строится гиперповерхность, разделяющая распознаваемые образы на классы в пространстве признаков (объектов). Классификатор выполняется в виде сети из линейных пороговых элементов или вычислительного устройства.
Сравнение действительного образцового описания распознаваемых классов и выработка сигналов ошибки производятся в устройстве сравнения.
Для функционирования распознающей системы необходимым условием является наличие сведений о классах совокупностей объектов. Эти сведения задаются заранее или возникают в процессе обучения, который в этом случае предшествует процессу классификации. В процессе обучения на вход распознающей системы последовательно подаются признаки образов каждого класса и если система при этом сообщает, к какому классу принадлежит образ, процесс называется обучением с учителем. Если же система не сообщает, к какому классу принадлежит образ, процесс называется обучением без учителя или самообучением.
ЛЕКЦИЯ 16
План лекции:
1. Метрологическое обеспечение технологических измерений
1.1. Государственная метрологическая служба
1.2. Государственная система обеспечения единства измерений
1.3. Поверка, ревизия и экспертиза средств измерений
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 1318; Нарушение авторских прав?; Мы поможем в написании вашей работы!