КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Определение места судна с использованием глобальных спутниковых навигационных систем
|
|
|
|
16.1 Структура глобальных навигационных спутниковых систем
16.1.1.Общие сведения
Глобальная навигационная спутниковая система ГНСС
предназначена для высокоточного определения координат места подвижных объектов, их курса и скорости.
В настоящее время навигационные спутниковые системы нашли самое широкое применение в различных сферах человеческой деятельности, но особое место в силу своих положительных свойств (глобальность, высокая точность, независимость от погодных условий, времени суток и сезона) они нашли на транспорте.
В составе современных ГНСС второго поколения ГЛОНАСС и GPS функционируют три основные подсистемы:
• навигационных космических аппаратов НКА – космический сегмент;
• контроля и управления (наземный командно-измерительный
комплекс КИК или сегмент управления);
• навигационной аппаратуры потребителей НАП - судовые приемоиндикаторы (ПИ).
Основной задачей, решаемой ГНСС, является определение пространственных координат местоположения подвижного объекта и времени.
Эта задача реализуется непосредственно в приемоиндикаторе.
Измерение навигационного параметра - расстояния до спутника - выполняется на основе беззапросных (пассивных) дальномерных измерений по сигналам нескольких видимых НКА с известными координатами. Затем, с помощью процессора ПИ, по жестко введенной программе, выполняется расчет времени, координат объекта, его курса и скорости. Кроме того, процессор современных ПИ выполняет решение ряда навигационных задач.
Применение беззапросных измерений обеспечили возможность достижения неограниченной пропускной способности ГНСС.
16.1.2 Подсистема навигационных космических аппаратов
Основная функция подсистемы состоит в формировании и излучении радиосигналов, которые необходимы для навигационных определений. В состав аппаратуры НКА включают:
• радиотехническое оборудование (передатчики навигационных сигналов и телеметрической информации, приемники данных и команд от КИК, антенны, блоки ориентации);
• ЭВМ;
• бортовой эталон времени и частоты;
• солнечные батареи и др.
Бортовые эталоны времени и частоты обеспечивают синхронное излучение навигационных сигналов всеми спутниками орбитальной группировки, что необходимо для реализации дальномерных измерений в ПИ
Навигационные сигналы НКА содержат дальномерные компоненты и компоненты служебных сообщений.
Дальномерные компоненты используют для определения в ПИ навигационных параметров. Компоненты служебных сообщений предназначены для передачи на подвижные объекты координат спутников, векторов их скоростей, времени и др.
16.1.3 Подсистема контроля и управления КИК
Представляет собой комплекс наземных средств, которые обеспечивают:
• наблюдение и контроль за траекториями движения НКА;
• качеством функционирования их аппаратуры;
• управление режимами их работы и параметрами спутниковых
радиосигналов;
• 
 составом, объемом и дискретностью передаваемой со спутников
составом, объемом и дискретностью передаваемой со спутников
навигационной информации;
• стабильностью бортовой шкалы времени и др.
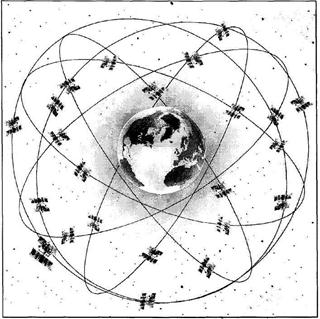
Рис. 16.1 Подсистема навигационных космических аппаратов НКА.
16.1.4 Подсистема навигационной аппаратуры потребителей НАП
Подсистема включает в себя:
• антенну;
• приемоиндикатор, состоящий из приемника и процессора, приемника корректирующей информации, устройства ввода-вывода информации, сетевого адаптера.
Приемоиндикатор ПИ предназначен для решения следующих основных задач:
• одновременной обработки сигналов спутников, находящихся
в зоне радиовидимости;
• автоматической непрерывной выработки пространственных координат, скорости и направления перемещения подвижного объекта (судна);
• приема и обработки корректирующей информации;
• отображения необходимой информации с индикацией вычисленных географических координат (в градусах, минутах и тысячных долях минуты) и времени обсерваций относительно Всемирного скоординированного времени UTC в системах координат Международной геодезической системы координат
WGS-84 или в системе, параметры которой вводятся оператором;
• оценки точности определения координат и скорости;
• расчета среднего значения координат и скорости и их СКП по
серии наблюдений;
• выдачи результатов решения навигационной задачи;
• автоматического контроля функционирования;
• возможности ввода календарной даты;
• отображения режима работы и индикации работы в дифференциальном режиме.
Кроме того ПИ решает вспомогательные задачи:
· автоматический выбор созвездия спутников для проведения обсервации с учетом их технического состояния;
· выдачу внешним потребителям метки времени;
· прием, хранение и обновление альманахов ГЛОНАСС и GPS;
· поиск сигналов НКА и вхождение в связь при отсутствии альманахов системы;
·  автоматический контроль функционирования аппаратуры, индикацию неисправностей;
автоматический контроль функционирования аппаратуры, индикацию неисправностей;
· прием, учет и коррекцию информации при работе в дифференциальном режиме;
· расчет времени прихода в точку с заданными координатами с заданной скоростью;
· расчет скорости движения в заданную точку по времени при хода;
· расчет пройденного расстояния;
· ввод координат до 500 маршрутных точек;
· ввод 20 маршрутов или фарватеров (до 50 маршрутных точек в
каждом маршруте);
· расчет расстояния и направления от текущей точки до любой из маршрутных точек или между двумя любыми выбранными точками;
· апоминание текущих координат в качестве маршрутной точки;
· сигнализацию о подходе на заданное расстояние к точке с заданными координатами;
· выработку параметров отклонения от маршрута;
· световую и звуковую сигнализацию о выходе за пределы вы бранной ширины фарватера.
ПИ должен удовлетворять следующим минимальным эксплуатационно-техническим требованиям:
• точность определения координат при приеме и обработке сигналов дифференциальных поправок должна быть в пределах 10 м для вероятности 0,95;
• ПИ должен обеспечивать расчет обсервованных координат и выдачу данных на дисплей и в другие радио- и навигационные устройства с дискретностью не более 2 с. Минимальное разрешение отображаемых географических координат (широты, долготы) должно быть до 0,001 мин;
• после включения приемоиндикатора в режим "работа" должна быть обеспечена возможность получения первого отсчета координат с требуемой точностью в течение:
• 30 мин при отсутствии в памяти приемоиндикатора соответствующей базы
данных;
• 5 мин при наличии в памяти приемоиндикатора соответствующей базы данных;
• приемоиндикатор должен выполнять повторный поиск сигналов и расчет обсервованных координат с требуемой точностью:
• в пределах 5 мин, если без прекращения подачи питающего напряжения прием сигналов прерывался на период до 24 ч;
• в пределах 2 мин, если подача питающего напряжения прерывалась на время до 60 с;
• оборудование должно обеспечивать предупреждение о невозможности определения координат. До восстановления нормальной работы, на дисплее должны отображаться время и координаты последней обсервации с визуальной индикацией причины прекращения обсерваций;
• приемоиндикатор должен обеспечивать индикацию дифференциального режима работы.
В настоящее время в мире насчитывается более 200 фирм, занимающихся разработкой и производством НАП спутниковых навигационных систем.
Наибольшую известность получили образцы фирм "Trimble", "Garmin" (США), "Furuno" (Япония), "Sersel" (Франция).
16.2 ИСТОЧНИКИ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЙ НАВИГАЦИОННОГО ПАРАМЕТРА И ВЫПОЛНЕНИЯ ОБСЕРВАЦИЙ
Погрешности при определении значения навигационного параметра - расстояния до спутника - могут быть различной природы. При определении координат подвижного объекта эти погрешности приводят к ухудшению точности обсерваций.
Погрешности при прохождении сигнала через атмосферу Земли. Атмосфера Земли состоит из двух слоев - ионосферы и тропосферы. Ионосфера, верхняя часть атмосферы, характеризуется высокой степенью ионизации. Она начинается с высоты около 70-80 км от поверхности Земли. Тропосфера, нижняя часть атмосферы, содержит основную массу атмосферного воздуха, водяного пара, пыли и т.п. Она расположена до высоты 9 км над полюсами и 16 км над экватором.
Задержка сигнала при прохождении через ионосферу определяется с помощью математической модели. Моделирование реализуется программным обеспечением конкретного приемоиндикатора и зависит от качества самого приемоиндикатора и качества математической модели. Погрешность за счет воздействия ионосферы составляет до 5 метров.
Задержка сигнала при прохождении через тропосферу трудно предсказуема ввиду высокой динамичности этой среды с непредсказуемыми изменениями. По величине погрешность в значении навигационного параметра при прохождении тропосферы невелика и составляет порядка 1 метра.
Погрешности за счет многолучевого распространения. Эти погрешности сродни тем, что возникают на телевизионной картинке в виде теней или дублирующих изображений. Причина их появления в наличии
отраженных сигналов от поверхностей, находящихся вблизи принимающей антенны.
Вместе с сигналом, идущим напрямую от спутника, на вход антенны попадают сигналы отразившиеся от судовых конструкций, кранов, деревьев, движущихся объектов и т.п. Если приемник не отбракует такие отраженные сигналы, то могут возникнуть большие погрешности в обсервованных координатах либо выполнение обсервации станет невозможным. Часто такие отраженные сигналы трудно распознаваемы. Поэтому качество приемника имеет большое значение для точности и возможности обсерваций.
Погрешности в работе спутниковых часов. Атомные часы, используемые на спутниках, являются высокоточными приборами. Однако, как и любой другой прибор, они не идеальны. Те минимальные погрешности, которые присутствуют в работе этих часов, приводят к погрешности в измеряемом навигационном параметре до 1-5 метров.
Позиционные (эфемеридные) погрешности. Точное положение всех орбитальных спутников системы постоянно контролируется и поддерживается. Однако минимальные погрешности имеют место. Они появляются из-за значительного периода времени между возможностями наблюдать и корректировать положение спутников на орбитах.
Позиционные погрешности спутников приводят к погрешностям в измеряемом навигационном параметре порядка 2-5 метров.
Геометрический фактор точности определений. Подбор спутников для выполнения обсервации осуществляется приемником автоматически. Если этот выбор будет сделан некачественно, то это приведет к погрешности обсервации за счет геометрического фактора.
Если углы между направлениями на спутники малы, все спутники находятся в малой зоне над поверхностью Земли, то обсервация будет выполнена с невысокой точностью. Если спутники расположены «широко», то пересечение изоповерхностей будет оптимальным и обсервация высокоточной. Современные GPS приемники должны иметь возможность подбора оптимально расположенных спутников для выполнения обсерваций.
Солнечная активность. Мощные выбросы солнечной энергии в период повышенной солнечной активности приводят к сбоям в работе ГНСС и других спутниковых систем.
Источником солнечной активности служит возмущение в магнитном поле Солнца. Происходят выбросы вещества из солнечной короны. В одном выбросе может содержаться до 1 млрд. тонн материи, распространяющейся со скоростью более 3 миллионов километров в час. Происходят сильнейшие магнитные бури на всем пути распространения такой «порции». Солнечные батареи спутников поражаются сильнейшим излучением в рентгеновском диапазоне частот. Выходят из строя электронная и радиоаппаратура.
Солнечная активность имеет период около 11 лет. Следующий год активного Солнца 2012. Остается только надеяться, что Глобальная Навигационная Спутниковая Система переживет его с наименьшими потерями.
16.3 Методы определения места судна с помощью навигационных спутников
16.3.1 Общие сведения
Основным содержанием навигационной задачи, решаемой с помощью бортового приемоиндикатора СНС, является определение координат судна и его скорости.
Непосредственно измерить эти параметры не представляется возможным. Измерению поддается промежуток времени (задержка) между моментом передачи сигнала спутником до его приема на судне. Параметр радиосигнала называют радионавигационным, а соответствующий ему геометрический параметр — навигационным.
Задержка радиосигнала является радионавигационным параметром, а соответствующая ему дальность до судна D - навигационным параметром.
еометрическое место точек пространства с одинаковым значением навигационного параметра называется изоповерхностью.
Местоположение судна определяется пересечением трех изоповерхностей.
Для решения навигационной задачи используют функциональную зависимость между навигационными параметрами и координатами подвижного объекта. Соответствующие функциональные зависимости называются навигационными функциями.
Навигационные функции получают различными методами, основные из которых:
• дальномерный,
• псевдодальномерный,
• разностно-дальномерный,
• радиально-скоростной.
16.3.2 Дальномерный метод
Основан на пассивных (беззапросных) измерениях дальности Д между /-тым спутником и судном. Навигационным параметром является дальность Д а изоповерхностью — сфера с радиусом Д и центром, расположенным в центре масс /-того НКА.
Место судна определяют как координаты точки пересечения трех сфер, вследствие чего для реализации этого метода необходимо измерить дальности до трех навигационных спутников.
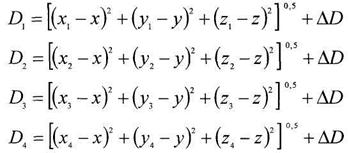
Для дальномерного метода навигационная функция представляет собой систему из трех уравнений вида


где х„ yh Zi - известные на момент измерения координаты /-того
навигационного спутника; x,y,z- координаты судна.
Из-за нелинейности этой системы уравнений возникает проблема неоднозначности определения координат судна, которая устраняется с помощью дополнительной информации (счислимые координаты судна).
Дальномерный метод предполагает, что все измерения дальности должны быть произведены в одно время. Однако координаты спутника привязаны к бортовой шкале времени, а координаты судна определены в своей шкале. В реальных условиях существует расхождение этих шкал и возникает смещение измеренной дальности относительно истинной, поэтому точность определения места судна падает.
Таким образом, недостатком метода является необходимость высокоточной привязки шкал времени спутника и судна. Т.е. судовая аппаратура должна иметь возможность отсчитывать время с той же точностью, что и аппаратура на орбите. Выполнение этого требования ведет к резкому удорожанию судовых бортовых приемоиндикаторов.
16.3.3 Псевдодальномерный метод
Под псевдодальностью от /-того спутника до судна понимают измеренную дальность Dt+AD до этого спутника, отличающуюся от истинной дальности Д на неизвестную, но постоянную за время определения навигационных параметров величину AD.
Здесь в качестве навигационного параметра принята Dj+AD. Изоповерхностью является сфера с центром в точке центра масс спутника. При этом радиус сферы изменен на неизвестную величину AD.
Измерение псевдодальностей до трех спутников приводит к системе трех уравнений с четырьмя неизвестными (х, у, z, AD), что вызывает неопределенность ее решения. Для устранения неопределенности необходимо провести дополнительное измерение псевдодальности до четвертого спутника и получить точное решение системы 4-х уравнений с четырьмя неизвестными (см. ниже), т. е. получить место подвижного объекта как точку пересечения четырех изоповерхностей.
Необходимость нахождения в зоне радиовидимости четырех навигационных спутников предъявляет жесткие требования к структуре орбитальной группировки, которые могут быть выполнены только в среднеорбитных СНС.
Достоинством данного метода является то, что он не накладывает жестких ограничений на значение погрешности временной шкалы судового приемоиндикатора и позволяет дополнительно вычислять отклонение его шкалы времени (поправку часов).
16.3.4 Разностно-дальномерный метод
Основан на измерении разностей дальностей от судна до нескольких навигационных спутников.
Метод аналогичен псевдодальномерному, так как его целесообразно использовать только при наличии в дальномерных измерениях неизвестных сдвигов AD.
В данном методе используются три разности расстояний до четырех спутников, так как при постоянстве AD за время навигационных определений разности псевдодальностей равны разностям истинных дальностей, для определения которых требуется только три независимых уравнения.
Навигационным параметром является разность расстояний. Изоповерхности представляют собой поверхности двухполостного гиперболоида вращения, фокусами которого являются координаты центров масс двух спутников, разность расстояний до которых измеряется.
Точность определения места подвижного объекта совпадает с точностью определения этих координат псевдодальномерным способом.
Недостаток разностно-дальномерного метода заключается в том, что в нем не может быть измерено смещение AD, т. е. смещение шкалы времени судового приемоиндикатора.
16.3.5 Радиально-скоростной (доплеровский) метод
Базируется на измерении трех радиальных скоростей судна относительно трех навигационных спутников.
Недостатком рассматриваемого метода является невозможность проведения измерений в реальном времени.
Для его реализации необходим высокостабильный эталон частоты и времени. Нестабильность работы судовой бортовой аппаратуры по поддержанию эталона частоты и времени ведет к резкому ухудшению точности обсерваций.
16.4 Среднеорбитные навигационные спутниковые системы GPS и ГЛОНАСС
Низкоорбитные СНС первого поколения "Транзит" (США) и "Цикада" (СССР) имели существенные недостатки:
• относительно невысокую точность определения;
• большие промежутки времени между наблюдениями.
С целью преодоления этих недостатков сначала в США, а потом и в России было принято решение начать работы над созданием СНС нового поколения. В США первоначально она называлась "НАВСТАР" (NA Vigation Satellite providing Time And Range), т. е. "навигационная спутниковая система, обеспечивающая измерение времени и местоположения". В настоящее время система получила название GPS. В России среднеорбитная СНС получила название ГЛОНАСС - глобальная навигационная спутниковая система.
Основное назначение GPS и ГЛОНАСС — высокоточная навигация подвижных объектов в космосе, в воздухе, на воде и земле.
16.4.1 Навигационная спутниковая система GPS
Принцип работы системы основан на использовании псевдодальномерного метода.
В околоземном пространстве развернута сеть спутников, равномерно "покрывающих" всю земную поверхность. Орбиты вычисляются с очень высокой точностью, поэтому в любой момент времени известны координаты каждого спутника.
Бортовые стандарты частоты всех навигационных спутников синхронизированы и привязаны к так называемому "системному времени". Эталон времени на судне менее точен, чтобы чрезмерно не повышать его стоимость. Этот эталон должен обеспечивать только кратковременную стабильность в течение процедуры измерений.
На подвижном объекте наряду с псевдодальностями измеряют доплеровские сдвиги частот радиосигналов, что позволяет вычислить и его скорость.
Таким образом, для выполнения необходимых навигационных определений надо обеспечить постоянную видимость, как минимум, четырех спутников. Избыточные измерения (сверх четырех) позволяют повысить точность определения координат и обеспечить непрерывность решения навигационной задачи.
Космический сегмент состоит из 26 спутников (21 основной и 5 запасных), которые обращаются на шести орбитах.
Передающая аппаратура спутника излучает сигналы на двух несущих частотах: L1 = 1575,42 МГц и L2 = 1227,6 МГц. Обе несущие частоты кодируются навигационным сообщением, в котором содержатся данные об орбитах спутников, информация о параметрах атмосферы, поправки системного времени.
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 10556; Нарушение авторских прав?; Мы поможем в написании вашей работы!