КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция 5.2. Цифровые частотометры
|
|
|
|
Цифровые частотомеры — довольно распространенные измерительные приборы, используемые в самых различных отраслях науки, техники, промышленности для оценки частотно-временных параметров электрических сигналов. Они работают в очень широком диапазоне значений измеряемых частот периодических сигналов (или их периода). Современные ЦЧ обеспечивают самые высокие метрологические характеристики (точность и разрешающую способность) среди всех прочих ЦИП, отличаются достаточно высоким быстродействием, широкими функциональными возможностями, простотой эксплуатации, высокой надежностью.
Помимо измерения частотно-временных параметров периодических сигналов, современные ЦЧ применяются и для измерения различных физических величин. Для этого необходимо подключать к ЦЧ вспомогательные первичные измерительные преобразователи (датчики), имеющие выходные сигналы, частота или период (длительность) которых пропорциональны измеряемой величине. Например, ЦЧ можно использовать для измерения скорости вращения вала двигателя, или расхода жидкости в трубопроводе, или скорости потока воздуха. Цифровые частотомеры находят также применение в качестве генераторов стабильных частот и таймеров постоянных или программируемых интервалов времени. Кроме того, с помощью ЦЧ легко можно организовать подсчет числа импульсов (числа событий).
Практически все ЦЧ обеспечивают два основных режима работы: измерения частоты и измерения периода (длительности интервала времени). Рассмотрим структуры, принципы действия и погрешности ЦЧ в этих режимах.
УЭ - 5.2.1. Режим измерения частоты
Упрощенная структура ЦЧ, реализующая режим измерения частоты, показана на рисунке 5.5, а, а временные диаграммы работы в этом режиме приведены на рисунке 5.5, б.
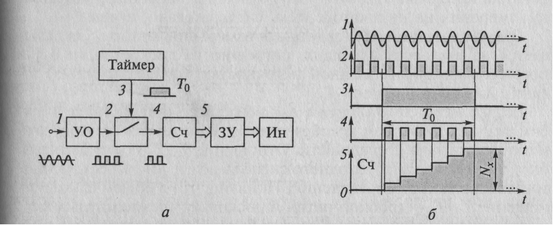
Рисунок 5.5. Режим измерения частоты: а — упрощенная структура ЦЧ; б — временные диаграммы работы
Исследуемый периодический сигнал 1 (соответственно диаграмма 7) подается на вход усилителя-ограничителя УО, где преобразуется в последовательность прямоугольных импульсов 2 (диаграмма 2) фиксированной амплитуды, частота которых равна частоте fx входного сигнала. Далее этот сигнал поступает на вход электронного ключа, которым управляет таймер, периодически замыкающий его на постоянный стабильный интервал времени 3 (диаграмма 3), например Г0 = 1 с. Сформированная таким образом серия импульсов 4 (диаграмма 4) поступает на вход счетчика Сч, содержимое которого 5 в начале интервала Г0 равно нулю, а в конце интервала счета равно числу поступивших импульсов Nx. Это число прямо пропорционально измеряемой частоте /х входного сигнала:
Nx=Ent[T0/Tx]= Ent[T0fx],
где Ent [...] — оператор определения целой части выражения [...]; Тх — период входного сигнала (Тх = 1/fx); fx — частота входного сигнала.
Содержимое счетчика 5 запоминается в буферном запоминающем устройстве ЗУ и хранится там до окончания следующего цикла измерения и переписи нового результата. Одновременно результат поступает на цифровое отсчетное устройство (индикатор Ин). Если, например, в течение интервала Г0 = 1 с на вход счетчика поступило 254 импульса, то, следовательно, частота входного сигнала fx = = 254 Гц. Прибор работает циклически, т.е. в начале каждого нового цикла счетчик «обнуляется». Таким образом, результат измерения периодически обновляется. Отметим, что форма периодического сигнала значения не имеет.
В реальных ЦЧ имеется несколько диапазонов измерения частоты, т. е. формируется несколько различных по длительности стабильных интервалов T0 (например,T01 = 0,1 с; T02 = 1,0 с; T03 = 10 с). При работе с ЦЧ в режиме измерения частоты важным является правильный выбор диапазона, т. е. выбор интервала T0, в течение которого происходит подсчет импульсов. Чем больше импульсов Nx поступит в счетчик (в пределах, конечно, максимально возможного) на интервале T0, тем больше будет значащих цифр результата измерения на индикаторе, тем, следовательно, лучше.
Общая погрешность ΔF результата измерения частоты fx складывается из двух составляющих: погрешности дискретности ΔF1 и погрешности ΔF2, вызванной неточностью (неидеальностью) задания интервала времени T0.
Погрешность дискретности ΔF1 неизбежно присутствует в любом аналого-цифровом преобразовании. Рассмотрим природу возникновения этой погрешности. Отношение Т0/Тх может быть любым, так как частота fx входного сигнала может иметь бесконечное множество различных значений. Понятно, что в общем случае отношение Т0/Тх — дробное число. А поскольку число импульсов Nx, подсчитываемых счетчиком, может быть только целым, то в процессе такого автоматического округления естественно и неизбежно возникает погрешность (погрешность дискретности).Оценим возможное значение этой погрешности. При одном и том же постоянном значении интервала T0, в зависимости от расположения (случайного) во времени входного сигнала и интервала T0, число импульсов, приходящихся на интервал T0, может отличаться в ту или другую сторону на единицу. На рисунке 5.6, а показаны две разные ситуации при совершенно одинаковых исходных условиях (одна и та же входная частота fx, один и тот же интервал T0): в первом случае (диаграмма 1) число импульсов, поступивших в счетчик, равно пяти, а во втором (диаграмма 2) случае число импульсов равно шести.
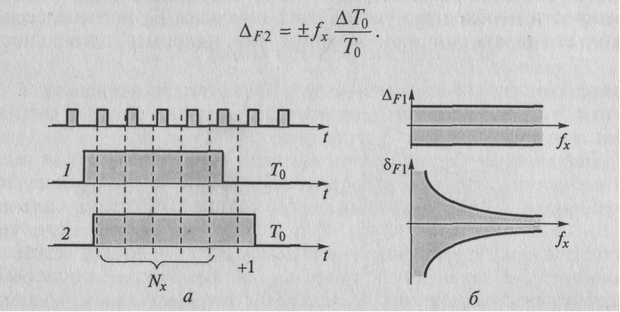
Рис. 5.6. Аддитивная погрешность в режиме измерения частоты: а — возникновение; б — абсолютная и относительная погрешности
Погрешность ΔF1 — случайная величина, поскольку входной сигнал и сигнал таймера в общем случае никак не связаны между собой. Максимально возможное значение этой погрешности неизменно и составляет одну единицу младшего разряда — один квант:
ΔF1 = ±1 импульс = ±1/T0.
Таким образом, ΔF1 — это аддитивная погрешность, т.е. не зависящая от значения измеряемой величины — частоты fx , как показано на рисунке 5.6 б.
Погрешность ΔF2 вызвана неточностью (неидеальностью) задания интервала T0 (см.рис. 5.6, а).
Если бы длительность интервала T0 имела строго номинальное значение, то число импульсов, поступивших в счетчик, было бы равно N1 (см. рис. 5.6, а). Если же интервал T0 будет, например, несколько больше номинального и составит T0 + ΔT 0, то при той же измеряемой частоте fx в счетчик поступит больше импульсов N2 > N 1 (см. рис. 5.6, а).
Неточность ΔT 0 задания этого интервала приводит к появлению мультипликативной, т. е. линейно зависящей от значения измеряемой частоты fx, составляющей, что показано на рисунке 5.7 а и б
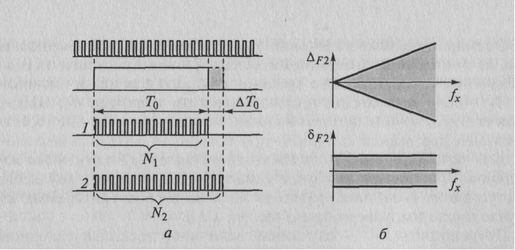
Рисунок 5.7. Мультипликативная погрешность в режиме измерения частоты: а — возникновение; б — абсолютная и относительная погрешности
Суммарная абсолютная погрешность Δ F результата измерения частоты fx и суммарная относительная погрешность δF, %, равны, соответственно:
ΔF = ΔF1+ ΔF2 =
δF = δF 1+ δF 2 =
Графическая иллюстрация поведения составляющих и суммарных абсолютной и относительной погрешностей результата измерения частоты fx приведена на рисунке 5.8, а и б, соответственно.
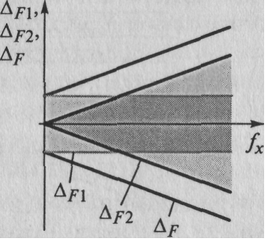
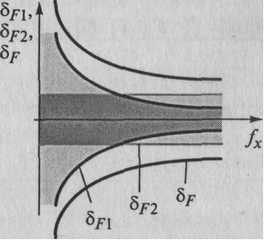
Рисунок 5.8. Суммарные абсолютная (a) и относительная (б) погрешности
Видно, что чем меньше значение измеряемой частоты fx в этом режиме, тем (при постоянном интервале T0) хуже, так как тем больше относительная погрешность δF. Для уменьшения этой погрешности необходимо увеличивать интервал Т0, но нецелесообразно его делать слишком большим. Так, например, длительность интервала Т0 = 10 с уже неудобна для работы, так как значительное время ожидания появления каждого нового результата (10 с) может вызвать у оператора раздражение. Для измерения сравнительно низких частот удобнее использовать второй режим ЦЧ — режим измерения периода (см. ниже) исследуемого входного сигнала Тх = 1/ f х. Рассмотрим пример определения погрешностей результата измерения частоты. Предположим, известны значение интервала Т0 = = 1 с и возможная погрешность его задания ΔT 0 = ±2 мс. Получен результат измерения частоты fx = 1 кГц. Оценим значения составляющих и суммарной погрешности результата.Значения абсолютных аддитивной ΔF1 и мультипликативной Δ F2 погрешностей, соответственно равны:
ΔF1 = ±1/Т0 = ±1 Гц;
ΔF 2= 
Значения относительных аддитивной δF1 и мультипликативной δF2 погрешностей определим обычным образом:
δF1 = (ΔF1 / )100 = ±(1/1000) 100 = ±0,1 %;
)100 = ±(1/1000) 100 = ±0,1 %;
δF2 = (ΔF2 /)100 = ±(2/1000) 100 = ±0,2 %;
Суммарные абсолютная ΔF иотносительная δF погрешности результата измерения частоты fx соответственно равны:
ΔF = ΔF1 + ΔF2 = ±3 Гц;
δF = δF1 + δF2 = ±3 %.
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 605; Нарушение авторских прав?; Мы поможем в написании вашей работы!