КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция №1. 1.1 Основные понятия и определения
|
|
|
|
ТММ
1. Введение
1.1 Основные понятия и определения
1.2 Классификация машин, механизмов
1.3 Курс и задачи курса
2. Структурный анализ механизмов
2.1 Кинематические пары, классификация К.П.
2.1.1 Низшие и высшие К.П.
2.1.2 Классы К.П.
2.1.3 К.П. плоские и пространственные
2.1.4 К.П. с силовым и геометрическим замыканием
2.2 Кинематические цепи
2.3 Звено, название звена
2.4 Кинематические схемы механизмов
2.5 Структурная формула К.Ц.
2.5.1 Структурная формула К.Ц. общего вида
2.5.2 Структурная формула плоских механизмов
ТММ является первой дисциплиной, вводящей студентов в круг общих и специальных дисциплин. В ее задачу входит подготовка студентов к слушанию курсов деталей машин, технологии машиностроения и курсов по расчету и конструированию отдельных видов машин в зависимости от специальности, по которой проходит подготовка студентов. Вместе с курсами теоретической механики, сопротивления материалов и деталей машин ТММ образует цикл предметов, обеспечивающих общеинженерную подготовку студентов.
Психологическая комфортность
Ситуация успехов
Снятие блоков, тормозящих мыслительный процесс
Субъект – субъектные отношения
Прикладная механика. Лекция 1.
Курс «Прикладная механика» состоит из 3-х разделов:
1) Теория машин и механизмов
2) Сопротивление материалов
3) Детали машин
1. Введение
История развития человечества – это бесконечная цепь перемен, на протяжении которой человек стремится познать законы природы, использовать их посредством техники и передать накопленные знания потомкам.
Глобальные события на рубеже 15 века: изобретение пороха, книгопечатание, открытие Америки, Индии, вызвали колоссальные экономические и психологические сдвиги в социуме. Если в древности, включая Византию, не было сделано окончательного выбора пути развития, то в 15 веке общество направило свое развитие в сторону научно-техническую, все более удаляясь от духовного пути развития.
Но в 16-17 веках умы великих мыслителей были заняты поиском всеобщего метода познания для свершения открытий, изобретательства. Мыслители стремились познать место и роль человека во Вселенной. О плодотворности поисков говорят свершенные в этот период открытия во многих областях науки, техники.
1.1 Основные понятия и определения.
Деталь (тело) – это изделие, изготовленное из однородного материала без применения сборочных операций.
Подвижное звено – подвижная деталь или группа деталей, образующая одну жесткую подвижную систему тел. Иногда в звене отсутствует жесткая связь между телами, например, лента конвейера с деталями, ею перемещаемыми; в этом случае отсутствует движение тел относительно друг друга.
Стойка – неподвижное звено – все неподвижные детали образуют одну жесткую неподвижную систему тел. Например: корпус двигателя и подшипник коренного вала – стойка.
Кинематическая пара – соединение двух соприкасающихся звеньев, допускающее их относительное движение.
Элемент КП – совокупность поверхностей, линий, отдельных точек звена, по которым оно может соприкасаться с другим звеном.
Кинематическая цепь – система звеньев, связанных между собой кинематическими парами.
Механизм – совокупность неподвижного и подвижных звеньев.
Механизм – система тел, предназначенная для преобразования движения одного или нескольких тел в требуемые движения других тел.
Таким образом, механизм предназначен для осуществления заранее заданных закономерных движений. В основе механизма лежит кинематическая цепь.
Вопрос: Можно ли всякую кинематическую цепь назвать механизмом?
Механизмы входят в состав машин.
Машина – устройство, выполняющее механические движения для преобразования энергии, материалов и информации в целях замены или облегчения физического и умственного труда человека.
1.2 Классификация машин, механизмов.
В зависимости от выполняемых функций машины подразделяются на классы:
1) Энергетические машины
А) Машины-двигатели – преобразование любого вида энергии в механическую
Б) Машины-генераторы – Преобразование механической энергии в энергию другого вида
2) Рабочие машины
А) Транспортные – Преобразование материала состоит в изменении положения основного перемещаемого объекта
Б) Технологические – Преобразование материала состоит в изменении формы, свойства и состояния материала или обрабатываемого объекта
3) Информационные машины - Получение и переработка информации
А) Контрольно-управляющие
Б) Математические
4) Кибернетические машины - Машины, заменяющие или имитирующие различные механические, физиологические или биологические процессы, присущие человеку и живой природе, обладающие элементами искусственного интеллекта
Автоматическая линия – совокупность машин-автоматов, соединенных между собой и предназначенных для выполнения определенного технологического процесса.
Машинный агрегат – развитое машинное устройство (техническая система), состоящее из двигателя, передаточных механизмов и рабочей машины, в некоторых случаях контрольно-управляющих и счетно-решающих устройств; техническая система, состоящая из одной или нескольких соединенных последовательно или параллельно машин и предназначенную для выполнения каких-либо требуемых функций.
Механизмы могут представлять собой сочетание только твердых тел, иметь в своем основном составе гидравлические, пневматические тела или электрические, магнитные и др. устройства.
Соответственно механизмы называются: гидравлические, пневматические, электрические …
В зависимости от функционального назначения механизмы машин подразделяются на виды:
1) Механизмы двигателей и преобразователей
2) Передаточные механизмы
3) Исполнительные механизмы
4) Механизмы управления, контроля, регулирования
5) Механизмы подачи, транспортировки, питания и сортировки обрабатываемых сред и объектов
6) Механизмы автоматического счета, взвешивания и упаковки готовой продукции.
Виды механизмов.
1) Механизмы а) двигателей: механизмы двигателей внутреннего сгорания, паровых машин, электродвигателей, турбин. Задача: преобразование различные виды энергии в механическую работу.
б) преобразователей: механизмы насосов, компрессоров, гидроприводов. Задача: преобразуют механическую работу в другие виды энергии.
2) Передаточные механизмы. Задача: передача движения от двигателя к технологической машине или исполнительным механизмам.
3) Исполнительные механизмы. Задача: непосредственное взаимодействие на обрабатываемую среду или объект с целью изменения формы, состояния, положения и свойств обрабатываемой среды или объекта.
4) Механизмы управления, контроля и регулирования
5) Механизмы подачи, транспортировки, питания и сортировки
6) Механизмы автоматического счета, взвешивания и упаковки готовой продукции
1.3. Курс и задачи курса.
К исследованию механизмов с различными функциональными назначениями можно применять общие методы, базирующиеся на основных положениях современной механики.
Исследование механизмов:
- кинематика, динамика
- теоретическая механика: абсолютно твердые тела
- теоретическая механика, сопротивление материалов, теория упругости, теория колебаний: упругие тела
- гидромеханика, аэродинамика: входят в состав жидкие или газообразные тела
В основе исследований механизмов лежат законы и методы теоретической механики – одной из основных общенаучных дисциплин.
Теоретическая механика – наука, которая изучает механические движения вещественных форм материальных объектов в пространстве с течением времени.
Курс теоретической механики состоит из трех частей: статики, кинематики и динамики.
Статика – это раздел ТМ, в котором изучается относительное равновесие материальных тел, находящихся под действием приложенных к ним сил.
Кинематика – это раздел ТМ, в котором изучается движение материальных тел с геометрической точки зрения, без учета причин, вызывающих и изменяющих это движение.
Динамика – это раздел ТМ, в котором изучается движение материальных тел, происходящие под действием приложенных к ним сил.
Слово «механика» в переводе с греческого означает «изобретение, машина, сооружение».
Механика – одна из первых наук о природе и возникла примерно в 4в. до н.э. в древней Греции.
Зарождение механики связывают с именем Аристотеля (384-322 до н.э.). Аристотель впервые ввел термин «механика».
В трудах Архимеда (287-212 до н.э.) механика получила дальнейшее развитие (закон равновесия рычага, учение о центре тяжести тел).
Леонардо да Винчи (1452-1519): первые исследования в области теории механизмов, трения и движения тел по наклонной плоскости.
Галилео Галилей (1564-1642): по-существу, положил начало динамике.
Исаак Ньютон (1643-1727) в «Математических началах натуральной философии» завершил построение основ классической механики.
Развитие: - геометрических методов: французы Вариньон(1654-1732) и Л. Пуансо(1777-1859)
- аналитических методов: Л. Эйлер(1707-1783), Ж. Даламбер(1717-1783), Ж. Логранж(1736-1813).
Механика машин – наука, состоящая из двух дисциплин: теория механизмов; теория машин.
Теория механизмов и машин – наука, изучающая строение, кинематику и динамику механизмов в связи с их анализом и синтезом.
Анализ механизмов – исследование структурных, кинематических и динамических свойств механизмов.
Синтез механизмов – проектирование механизмов с заданными структурными кинематическими и динамическими свойствами.
Теория машин – наука, которая изучает совокупность взаимно связанных механизмов, образующих отдельную машину, или машинный агрегат, или машинное устройство, состоящее из комплекса машин – так называемую систему машин автоматического действия.
Структурный и кинематический анализ механизмов:
1) Изучение теории строения механизмов
2) Исследование движения тел, образующих механизм, с геометрической точки зрения, независимо от сил, вызывающих это движение.
Динамический анализ механизмов:
1) Изучение методов определения сил, действующих на тела, образующие механизм
2) Изучение взаимосвязи между а) движениями этих тел, б) силами, на них действующими, в) массами, которыми обладают эти тела.
ТММ состоит из четырёх частей:
1) Структурный и кинематический анализ механизмов;
2) Динамический анализ механизмов;
3) Синтез механизмов;
4) Основы теории машин-автоматов.
Условие связи в КП – ограничения, накладываемые на относительное движение каждого звена, зависящего от способа соединения звеньев пары.
Из теоретической механики
Аксиома связей.
Связь для твердого тела это материальные объекты (тела и точки), которые ограничивают свободу перемещения рассматриваемого твердого тела или материальной точки.
2.Структурный анализ.
2.1.Кинематические пары, классификация КП.
КП-это подвесное соединение двух звеньев.
2.1.1. Низшие и высшие КП.
Низшая пара – КП, которая может быть выполнена соприкосновением, элементов ее звеньев по поверхности или плоскости.
Высшая пара – КП, которая может быть выполнена соприкосновением элементов ее звеньев по линиям или в точках.
2.1.2.Классы КП.
Соединение звеньев в КП накладывает ограничения на движение звеньев (накладывает связи)
Н.Н.Никитин Т.М стр 382.
Механическая система - любая совокупность материальных точек.
Связь - условия, ограничивающие свободу перемещения точек механической системы.
Принятое обозначение:
s-число условий (накладываемых) связи 1<= s<=5
w-число степеней свободы 1<=w<=5
По числу накладываемых связей S на относительное движение звеньев КП подразделяются на 5 классов.
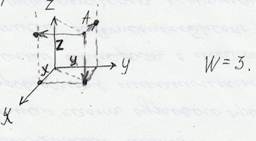 |
Пространство имеет три измерения. Точка имеет три координаты,x,y,z.
Три точки определяют материальное тело
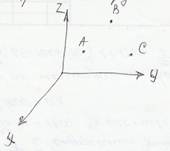
Три свободные точки имеют 3*3=9 степеней свободы.
Между тремя точками, определяющими тело, наложено три связи
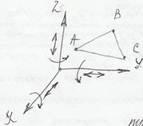 Тогда число степеней свободы тела равно W= 9-3=6
Тогда число степеней свободы тела равно W= 9-3=6
Это означает возможные движения:
Три-по осям x,y,z
Три-вокруг осей X,y.z
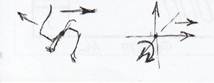
Для отдельно взятого звена:
В пространстве На плоскости
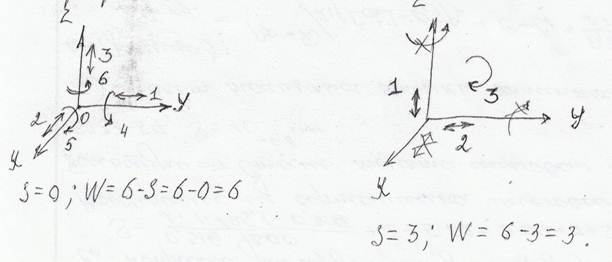
Возможные движения в КП могут быть:
1)независимыми друг от друга;
2)одно с другим связаны каким-нибудь дополнительными геометрическими условиями, устанавливающими функциональную связь между движениями (винтовая пара).
Число простейших движений во втором случае больше числа степеней свободы,функциональная зависимость является дополнительным условием связи.
| Содержание КП | Форма контакта-соприкосновения | Класс КП | Условное обозначение |
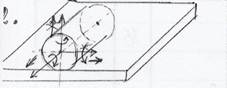
 Шар на плоскости.
Шар на плоскости.
| Точка ВП | 1 класс S=1; W=6-1=5 | 
|
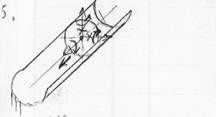
 Цилиндр на плоскости
Цилиндр на плоскости
| Линия ВП | 2 класс S=2; W=6-2=4 | |
 Шар-цилиндр
Шар-цилиндр
| Точка ВП | 2 класс S=2; W=6-2=4 | 
|
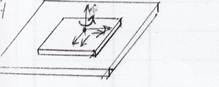 Плоскость-плоскость
Плоскость-плоскость
| Плоскость НП | 3 класс S=3; W=6-3=3 | 
|
 Сферическая
Сферическая
| Поверхность НП | 3 класс S=3; W=6-3=3 | 
|
 Цилиндрическая
Цилиндрическая
| Поверхность НП | 4 класс S=4; W=6-4=2 | 
|
 Кулачковый
Кулачковый
| Точка ВП | 4 класс S=4; W=6-4=2 | |
| Точка или линия ВП | 4 класс S=4; W=2 | |
 Поступательная
Ползун
Поступательная
Ползун
| Плоскость НП | 5 класс S=5;W=1 | 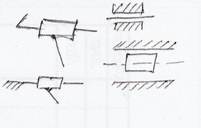
|
 Вращательная
Шарнир
Вращательная
Шарнир
| Поверхность НП | 5 класс S=5; W=1 | 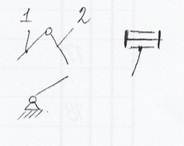
|
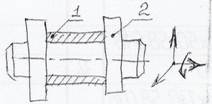
 Винтовая Винтовая
| Поверхность НП | 5 класс S=5;W=1 Два движения функционально связаны | 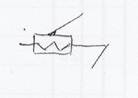
|
Высшая КП – КП, которая может быть выполнена соприкосновением элементов её звеньев по линиям или в точках.
Низшая КП – КП, которая может быть выполнена соприкосновением элементов её звеньев по поверхности.
2.1.3 КП плоские и пространственные.
Так как плоскость уже накладывает три связи, а встречное звено накладывает одну или две связи, то на плоскости могут существовать только КП 4 и 5 классов.
2.1.4. КП с силовым и геометрическим замыканием
Геометрическое замыкание осуществляется соответствующими геометрическими формами элементов звеньев КП.
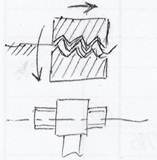
Силовое замыкание осуществляется силой веса, силой упругости пружины и т.д.
 Силовое замыкание
Силовое замыкание
2.2.Кинематические цепи.
Кинематической цепью называется система звеньев, связанных между собой КП.
Кинематические цепи бывают:
1)плоские и пространственные
2)простые и сложные
3)замкнутые и разомкнутые
Простая кинематическая цепь-такая цепь, у которой каждое звено входит не более чем в две КП.
Сложная кинематическая цепь, в которой имеется хотя бы одно звено, входящее более чем в две КП.
Замкнутая КЦ - КЦ, звенья которой образуют один или несколько замкнутых контуров, ответвления заканчиваются стойкой.
Незамкнутая КЦ - КЦ, звенья которой не образуют замкнутых контуров.
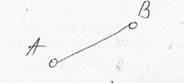
2.3. Звено, название звена.
Схематическое изображение звена, входящего в две вращательные КП.
Схематическое изображение звена, входящего в три вращательные пары.
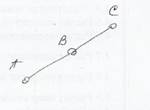
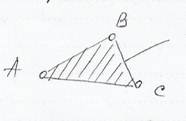
Базисное звено
В зависимости от характера совершаемого движения звенья имеют название.
Стойка – звено, принятое за неподвижное.
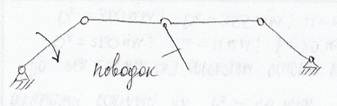
Кривошип – звено, которое вращается вокруг неподвижной оси, делая полной оборот.
Коромысло – звено, которое вращается вокруг неподвижной оси, делая неполный оборот.
Шатун – звено, которое не соединено со стойкой и совершает сложное плоское движение.
Ползун – звено, которое совершает движение по прямолинейной направляющей.
Кулиса – звено, которое образует вращательную или поступательную пару со стойкой и одновременно поступательную пару со звеном, подвижно соединенным с кривошипом.
Плоская, сложная, разомкнутая КЦ.
2.4. Кинематические схемы механизмов.
Механизм – это кинематическая цепь, имеющая стойку, в которой движение одного или нескольких звеньев, законы движения которых заданы, преобразуются во вполне определенное движение остальных звеньев.
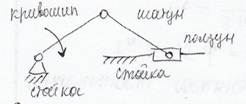 Поршневой двигатель
Поршневой двигатель
Различают механизмы:
- рычажные;
- зубчатые;
- червячные;
- фрикционные;
- винтовые;
- кулачковые, а также механизмы с гибкими звеньями.
Плоский механизм – это такой механизм, все звенья которого движутся или в одной плоскости или в параллельных плоскостях (общее дополнительное условие – параллельность осей всех КП.).
 Это накладывает три общих дополнительных условия связи (три общих ограничения).
Это накладывает три общих дополнительных условия связи (три общих ограничения).
Например, оси || Ox, звенья движутся в плоскости || zOy.
Условие связи
 Возможные движения.
Возможные движения.
Рычажный механизм – это такой механизм, в котором существуют только КП 5 класа.
Плоский механизм – механизм, в котором общее дополнительное условие – параллельность осей всех кинематических пар.
Кинематическая схема механизма (кинематическая модель механизма)- это схема, выполненная в масштабе с соблюдением тех размеров и форм, при изменении которых изменяется положение, скорость и ускорение точек механизма.
Для сложных механизмов составляется условная структурная схема механизма, на которой:
1) 
 Все поступательные пары заменяются вращательными;
Все поступательные пары заменяются вращательными;
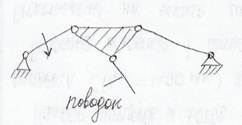
2) Звено, входящее в три КП изображается в четыре КП:
3) Е учитывается длина звеньев;
4) Двойные шарниры изображаются в виде двух концентрических окружностей.
Входное звено механизма – звено, которому сообщается движение, преобразуемое механизмом в требуемое движение других звеньев.
Выходное звено- звено, совершающее движение для выполнения которого и предназначен механизм.
При кинематическом анализе механизма кинематические параметры одного или нескольких звеньев необходимо знать или задать. Чаще в качестве начального звена принимают входное. Число их, в плоском механизме с парами пятого класса, должно быть равно числу степеней свободы механизма W. Применяют термины начальное звено (кинематические параметры известны или заданы), чаще входное.
В некоторых случаях применяют термин ведущее (движущее) звено - звено, если приложенные к нему внешние силы совершают положительную элементарную работу.
Ведомое звено – звено, если приложенные к нему внешние силы совершают отрицательную или равную нулю работу.
В большинстве случаев входное звено является и ведущим, но могут быть случаи инверсии
[латин. Перестановка], когда входное звено становится ведомым.
2.5 Структурная формула К.Ц.
2.5.1 Структурная формула кинематической цепи общего вида.
Принятое обозначение:
k – число звеньев КЦ
P5, P4, P3, P2, P1 – число КП соответственно 5, 4, 3, 2, 1-го классов.
6k- число степеней свободы k звеньев до их вхождения в КП;
5* P5 ; 4* P4; 3* P3; 2* P2; 1* P1 – число условий связи накладываемых соответственно КП 5, 4, 3, 2,1-го классов.
H – число степеней свободы, которым обладает КЦ
H= G*k - 5* P5 – 4* P4 - 3* P3 - 2* P2- 1* P1
В замкнутой, незамкнутой КЦ, если одно из звеньев будет неподвижным, то стойка уменьшит общее число степеней свободы на 6.
W = H – 6
H –число степеней свободы КЦ;
W- число степеней свободы (степень свободы) КЦ относительно звена, принятого за неподвижное.
W = 6k- 6 -5* P5 – 4* P4 - 3* P3 - 2* P2- 1* P1
W= 6(k-1) -5* P5 – 4* P4 - 3* P3 - 2* P2- 1* P1
W= 6*n - 5* P5 – 4* P4 - 3* P3 - 2* P2- 1* P1, формула Соснова-Малышева
Где n= k-1- число подвижных звеньев КЦ.
Это структурная формула КЦ общего вида или формула подвижности. Формула Соснова-Малышева.
Степень подвижности механизма характеризует число степеней свободы механизма относительно звена, принятого за неподвижное.
Если механизм имеет одну степень свободы, то одному звену можно предписать относительно стойки вполне определенный закон движения - одну обобщенную координату механизма.
Обобщенная координата механизма - каждая из независимых между собой координат, определяющих положение всех звеньев механизма относительно стойки. Обычно в качестве обобщенных координат берутся законы движения звеньев, входящих в кинематические пары со стойкой.
Начальное звено - звено, которому приписывается одно или несколько обобщенных координат механизма.
2.5.2 Структурная формула плоских механизмов.
В плоских механизмах накладываются три общих ограничения
Структурная формула имеет вид
W = (6-3)*n – (5-3)*P5- (4-3)*P4-(3-3)*P3
W = 3*n-2*P5-1*P4 , формула Чебышева
К плоским механизмам относятся также механизмы с одними поступательными парами, оси движения которых параллельны одной общей плоскости. Звенья не имеют возможности вращательного движения вокруг оси, перпендикулярной к плоскости их движения. Например, клиновый механизм.
W = (6-4)*n – (5-4)*P5-(4-4)*P4
W = 2*n- 1*P5 , формула В.В. Добровольского
Примеры:
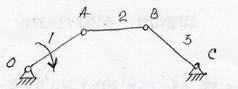
W = 3*n- 2*P5- 1*P4
n = 3
P5 = 4
P4 = 0
W = 3*3 – 2*4 – 0
W = 9 – 8 = 1 Одно начальное звено
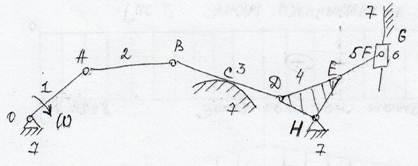
n = 6
P5 = 8
P4 = 1
W = 3*6 – 2*8 – 1*1
W = 18 – 16 – 1= 1 Одно начальное звено
|
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 672; Нарушение авторских прав?; Мы поможем в написании вашей работы!