КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Визначення параметрів сегменто–пальцевих апаратів
Обґрунтування параметрів механізмів жатки
Лекція 9
Для приводу ножа сегментно-пальцевого ріжучого апарату широко використовуються кривошипно-шатунні механізми. Дані механізми поділяються центральні (аксіальні) (рис. 9.1, а) та зміщені (дезаксіальні) (рис. 9.1, б).
а б
Рис.9.1. Схема кривошипно-шатунних механізмів: а – аксіального; б – дезаксіального
У аксіальних механізмів повзун та вісь обертання кривошипа знаходяться в одній площині, перпендикулярній площині обертання кривошипа. У дезаксіальних вісь кривошипа не лежить у цій площині, а віддалена від неї на величину , яка називається величиною дезаксіала.
, яка називається величиною дезаксіала.
У приводах сегментних різальник апаратів технічно важко використати аксіальні кривошипно-шатунні механізми через низьке по відношенню до ґрунту розташування ножа (повзуна) і ряд інших причин. Тому використовують механізми зміщені (дезаксіальні) з параметрами, наприклад, для косарок  та
та  , а для жаток
, а для жаток  і
і  .
.
При використанні дезаксіального механізму приводу повний хід ножа (повзуна) становитиме (рис.9.1, б)
 ,
,
де  , а
, а  .
.
Або
 .
.
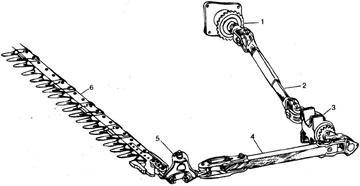
Рис. 7.2. Схема ріжучого апарату з дезаксіальним кривошипно-шатунним механізмом приводу: 1-вал контрпривідний; 2-карданний вал; 3-вал кривошипа; 4-шатун; 5-коромисло; 6-ріжучий апарат
Так коли  , а
, а  то
то  . Отже повний хід ножа у дезаксіального механізму привода дещо більший ніж у аксіального. Також із рис. 9.1, б видно, що при русі ножа вправо кут повороту кривошипа менший, ніж кут його повороту при русі ножа вліво. Тому за постійної швидкості обертання кривошипа дезаксального механізму час руху ножа вправо буде меншим ніж час зворотного ходу.
. Отже повний хід ножа у дезаксіального механізму привода дещо більший ніж у аксіального. Також із рис. 9.1, б видно, що при русі ножа вправо кут повороту кривошипа менший, ніж кут його повороту при русі ножа вліво. Тому за постійної швидкості обертання кривошипа дезаксального механізму час руху ножа вправо буде меншим ніж час зворотного ходу.
|
| Рис. 9.2. Схема защемлення стебла у розхилі різальної пари |
Для якісного зрізу стебел необхідною є умова за якої наявне їх защемлення у ріжучій парі, що створюють леза сегмента та протиріжучої пластини (рис. 9.2). Силу взаємодії стебла та леза можна розкласти на дві складові: нормальну -  та дотичну -
та дотичну -  . Ці сили зв’язані між собою залежністю
. Ці сили зв’язані між собою залежністю
 ,
,
де  - кут тертя матеріалу стебла по лезу.
- кут тертя матеріалу стебла по лезу.
Якщо спрямувати вісь ОХ системи координат за лінією леза протирізальної пластини, а осі ОУ за напрямом дії сили  , то отримаємо умову рівноваги стебла
, то отримаємо умову рівноваги стебла
Для защемлення стебла у різальній парі необхідно, щоб
 .
.
Оскільки  то з урахуванням (9.3) із (9.5) отримаємо
то з урахуванням (9.3) із (9.5) отримаємо
 .
.
З другого рівняння системи (9.4) маємо
 ,
,
або
 .
.
Підставляючи отримане значення у (9.6) та скоротивши на  запишемо
запишемо
 ,
,
або

Розділивши праву та ліву частину отриманої нерівності на  отримаємо
отримаємо
 ,
,
або
 ,
,
та
З урахуванням залежності тангенса суми двох кутів із (9.7) отримаємо

або
 .
.
Для сегментів без насічки при зрізанні стебел пшениці  , а при зрізанні трави
, а при зрізанні трави  . Для сегментів з насічкою значення кутів збільшують на 20...50%.
. Для сегментів з насічкою значення кутів збільшують на 20...50%.
|
Дата добавления: 2014-01-20; Просмотров: 530; Нарушение авторских прав?; Мы поможем в написании вашей работы!