КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Машинная валка и пакетирование деревьев
|
|
|
|
Лекция 10
3.3.1. Способы машинной валки деревьев
Валка деревьев может осуществляться машиной, выполняющей только эту операцию, состоящую из двух элементов: отделение дерева от пня, сталкивание (снятие и укладка) в заданном направлении. В этом случае необходима машина для сбора деревьев в пачки, которая полностью или частично должна повторить маршрут движения валочной машины по лесосеке, что не является положительным следствием с точки зрения сохранения лесной среды.
В связи с этим совмещенное выполнение процессов валки и пакетирования деревьев одной машиной является логически верным соединением функций, это тем более целесообразно, когда после отделения дерева от пня оно снимается и может быть уложено в пачку в нужное место.
Машинная валка деревьев может сопровождаться образованием дефектов (расщепы, сколы), которые снижают качество сортиментов, получаемых из наиболее ценной комлевой части ствола. Количество и величина дефектов зависят от конструкции реза, способа сталкивания (снятия) дерева с пня и условия взаимодействия срезающего и сталкивающего устройств.
Срезание дерева может быть выполнено одним из следующих вариантов: 1) напроход с расположением реза в одной плоскости; 2) двумя резами в одной плоскости с оставлением перемычки; 3) двумя и более резами, расположенными в двух плоскостях.
Для сталкивания дерева используются устройства рычажного и клинового типов, а снятие дерева с пня осуществляется грузонесущим манипулятором.
На рис. 3.11 показаны основные способы машинной валки деревьев. Срезание дерева напроход является наиболее простым, срезающий механизм несложен по конструкции, установка его в рабочее положение (к дереву) не требует продолжительных манипуляций, что способствует сокращению времени цикла обработки дерева. Во время сталкивания дерева с пня могут образоваться сколы и расщепы комлевой части ствола, возможно падение дерева в произвольном направлении.
Процесс валки дерева по схемам, представленным на рис. 3.11, а…в,можно разделить на три этапа.
Первый этап — срезание до положения, при котором перемычка окажется достаточно тонкой и возможно сталкивание дерева с пня. Во время первого этапа необходимо поддерживать дерево в исходном положении, чтобы избежать зажима срезающего устройства и предотвратить отклонение дерева от заданного направления.
Второй этап – сталкивание дерева с пня. Дерево наклоняется в сторону валки до разрушения связей ствола с пнем. В это время на дерево действует сталкивающая сила.
Третий этап – свободное падение дерева.
На рис. 3.11, а, б показаны схемы валки деревьев срезанием напроход и сталкиванием приложением сталкивающей силы (показано стрелкой) выше плоскости срезания. На первом этапе срезающее устройство предохраняется от зажима при помощи рычага (см. рис. 3.11, а). На втором этапе валки часто происходят сколы. Образование сколов ограничивает применение этого способа валки, тем не менее он используется на машинах ВМ-4Б и ВМ-55. На рис. 3.11, б представлен способ валки дерева при срезании напроход и сталкивании с пня с упором в пень домкратом (способ применен в машине ЛП-17А).
 На рис. 3.11, в при срезании напроход сталкивание с пня осуществляется натягивающей вверх силой подъема манипулятора. Способ применен на машине ЛП-49.
На рис. 3.11, в при срезании напроход сталкивание с пня осуществляется натягивающей вверх силой подъема манипулятора. Способ применен на машине ЛП-49.
На рис. 3.11, г изображена схема валки дерева при срезании напроход клиновидным ножом, которым оно и сталкивается с пня. Усилие внедрения ножа гасится пнем через упор. Наличие на упоре контрножа обеспечивает бездефектное сталкивание дерева с пня. Валочное устройство и его кинематика в этом случае просты. При срезании крупных деревьев требуются большие усилия, вследствие чего валочное устройство получается громоздким.
На рис. 3.11, д, е, ж, з при использовании различных механизмов для срезания бездефектная валка обеспечивается снятием дерева с пня грузонесущим манипулятором с жесткими захватами. При этом вся сила тяжести дерева воспринимается манипулятором при его снятии и переносе.
На рис. 3.11, д представлен способ валки, при котором срезание двумя резами осуществляется плоскими или клиновидными ножами, натяг уменьшает силу срезания.
На рис. 3.11, е показан способ валки дерева путем срезания его напроход и снятия с пня манипулятором. Во время первого этапа валки дерево натягивается манипулятором, чтобы избежать зажима срезающего устройства. На втором этапе после полного перерезания ствола дерево снимается с пня. При данном способе обеспечивается бездефектная валка дерева, но для обеспечения устойчивости машина должна иметь большую массу, особенно если она предназначена для работы в крупномерных насаждениях. Рассматриваемый способ валки использован в ЛП-19А, ЛП-60, МЛ-135 и др.
Бездефектная валка осуществляется и при способах, представленных на рис. 3.11, ж, з. В первом из них беззажимное срезание осуществляют цилиндрической фрезой. Предварительного натяга вверх не требуется. Во втором – срезание дерева осуществляется ступенчато-сферическим ножом за один его поворот в горизонтальной плоскости. Время срезания в этом случае незначительно, однако для привода такого ножа требуется большая мощность.
3.3.2. Механизмы для срезания и сталкивания (снятия)
деревьев с пня
На рис. 3.12 показаны схемы срезающих механизмов, которые могут быть использованы в определенных условиях в качестве рабочих органов валочных и многооперационных машин.
Цепные пилы (рис. 3.12, а, б) являются наиболее распространен-ными рабочими органами лесозаготовительных машин, предназначенных для валки деревьев. Как видно из рисунка, схемы цепных срезающих механизмов могут быть различными и зависят от принятого способа срезания дерева и схемы движения его при подаче на дерево.
Подача на дерево в первом случае осуществляется прямолинейным движением; во втором – поворотом шины вокруг оси О (на рисунках показано стрелками). Срезание дерева производится напроход. При сталкивании дерева с пня рычагом могут образовываться сколы и расщепы комлевой части ствола, для их исключения необходимо снижать точку приложения сталкивающей силы, при небольшой толщине перемычки.
Дисковые пилы (рис. 3.12, в) могут применятся для срезания деревьев. Вследствие большой скорости резания они обладают высокой производительностью чистого пиления. Дисковыми пилами можно срезать деревья малого диаметра.
Цилиндрическая фреза (рис. 3.12, г) для обеспечения высокой жесткости должна иметь значительный диаметр (80…100 мм). При такой ширине пропила (это их главный недостаток) требуется привод большой мощности, чтобы обеспечить высокую производительность фрезерования. Достоинством цилиндрических фрез является их высокая механическая прочность, возможность срезать деревья напроход, не опасаясь зажима фрезы.
Дисковые фрезы (рис. 3.12, д) могут иметь внецентровой привод, благодаря чему ими можно срезать деревья больших диаметров и получать высокую производительность фрезерования. Имея большую толщину, фрезы дают и большую ширину пропила.
Схемы срезающих механизмов с использованием ножей для безопилочного резания в виде клиновидных и плоских ножей показаны на рис. 3.12, е, ж, з. Клиновидные ножи одновременно со срезанием дерева сталкивают его с пня. Они эффективно используются в зарубежной практике для валки деревьев в насаждениях с небольшим средним объемом хлыста. Подача одного (ж) или двух (е) ножей осуществляется путем их поворота вокруг осей с помощью гидропривода. На схеме (з) для обеспечения прямолинейной подачи используется кулисный механизм (ребристая поверхность опоры 4 исключает выскальзывание дерева).
Рис. 3.12. Схемы механизмов для срезания дерева: а, б – цепные пилы; в – дисковая пила; г – цилиндрическая фреза; д – дисковая фреза; е, ж, з – дисковые и клиновидные ножи (1 – гидроцилиндр, 2 – нож, 3 – кулиса, 4 – корпус); и – ступенчато-сферический нож
Перспективной является схема срезающего механизма (рис. 3.12, и), использующего ступенчато-сферический нож. Срезание за один поворот ножа обеспечивает высокую скорость, но требует большой мощности привода механизма.
Устройства для сталкивания (снятия) дерева с пня подразделяются на две основные группы: передающие реакцию сталкивающей силы на машину или ее рабочие органы и гасящие ее пнем (сталкивание с упором в пень). Устройства первой группы могут быть рычажного и манипуляторного типов. При использовании рычагов дерево сталкивается с пня приложением сталкивающей силы выше плоскости срезания. Стремление уменьшить величину сталкивающей силы и исключить возможность падения дерева в обратном направлении приводит к тому, что точку приложения сталкивающей силы повышают (на машине ВМ-4А сталкивающий рычаг смонтирован на ограждении кабины). При использовании устройств манипуляторного типа дерево снимается с пня или сталкивается путем наклона его в сторону валки манипулятором.
Устройства второй группы могут быть рычажными и клиновыми. Сталкивание (снятие) деревьев с пней устройствами второй группы производится с упором в пень, т. е. реакция усилия сталкивания (снятия) воспринимается пнем. При использовании валочных устройств, не воспринимающих реакции сталкивающих сил, можно выполнять валку деревьев, удаленных от машины, при этом устойчивость машины не нарушается.
Принципиальная схема валочного устройства со сталкиванием дерева с пня с упором в пень представлена на рис. 3.11, б. Срезание дерева производится цепной пилой напроход. По окончании срезания дерево наклоняется в сторону валки с помощью домкрата, встроенного в механизм. При зажиме дерева захватами упор домкрата внедряется в ствол ниже плоскости срезания. После включения срезающего механизма производится натяг дерева выше плоскости срезания с помощью гидродомкрата. В момент полного перерезания ствола дерево поднимается над пнем на 3…4 см. После отделения от пня дерево вместе с захватно-срезающим устройством наклоняется в сторону валки.
3.3.3 Конструкция технологического оборудования валочных
и валочно-пакетирующих машин
В нашей стране получили применение фланговые рычажные ва-лочные машины, они позволяют осваивать за один проход полосу леса шириной до 2,5 м. В процессе валки леса рычажная валочная машина должна подъезжать к каждому дереву, что создает определенные трудности и ведет к уничтожению подроста.
Валочная машина рычажного типа состоит из базового трактора и навесного технологического оборудования для механизации процесса валки дерева, установленного на раме трактора, и включает следующие основные узлы: механизм срезания дерева с подвеской, механизм направленной валки дерева, перекидной рычаг, снегоочиститель, ограждение кабины и гидросистему.
Механизм срезания дерева с подвеской служит для отделения ствола дерева от корневой системы. На отечественных валочных машинах применяют цепные пильные механизмы с гидроприводом. Такой пильный механизм состоит из, корпуса 2, гидромотора 1, цепного пильного аппарата 4, упора 3, выключателя конечного положения пильной шины и гидроцилиндра надвигания, пильного аппарата (рис. 3.13). Гидромотор служит для привода в действие пильного аппарата. Корпус пустотелый и крепится к вертикальной трубе 5 подвески.
 |
Пильный аппарат – консольный и конструктивно выполнен так же, как и пильный аппарат переносных цепных моторных пил. Смазка пильного аппарата производится маслом из гидросистемы через трубку, идущую от сливной магистрали гидродвигателя. Надвигание пильного аппарата на дерево производится гидроцилиндром 14 при помощи эксцентрика или шестеренно-реечного механизма.
 Подвеска включает вертикальную трубу 5,кронштейн 8,неподвижную 10 и выдвижную 11 горизонтальные балки, гидроцилиндр 7 подъема и опускания пильного аппарата и гидроцилиндр 12 перемещения выдвижной балки. Крепление вертикальной трубы с пильным механизмом к кронштейну при помощи тяг 6 и 13 позволяет поднимать и опускать пильный аппарат. Поскольку тяги, труба и кронштейн образуют параллелограмм, пильный аппарат всегда занимает горизонтальное положение относительно горизонтальной машины. Горизонтальные балки коробчатого сечения. Выдвижная балка перемещается по направляющим 9, закрепленным на неподвижной балке и к ее наружному концу прикреплен кронштейн, а внутри расположен гидроцилиндр 12. Благодаря этому пильный аппарат может выдвигаться влево на требуемое расстояние, а в транспортном положении располагаться за кабиной трактора над ходовой частью. Неподвижная балка крепится к правому лонжерону рамы трактора шарнирно, что позволяет ей вместе с пильным механизмом перемещаться относительно левого лонжерона.
Подвеска включает вертикальную трубу 5,кронштейн 8,неподвижную 10 и выдвижную 11 горизонтальные балки, гидроцилиндр 7 подъема и опускания пильного аппарата и гидроцилиндр 12 перемещения выдвижной балки. Крепление вертикальной трубы с пильным механизмом к кронштейну при помощи тяг 6 и 13 позволяет поднимать и опускать пильный аппарат. Поскольку тяги, труба и кронштейн образуют параллелограмм, пильный аппарат всегда занимает горизонтальное положение относительно горизонтальной машины. Горизонтальные балки коробчатого сечения. Выдвижная балка перемещается по направляющим 9, закрепленным на неподвижной балке и к ее наружному концу прикреплен кронштейн, а внутри расположен гидроцилиндр 12. Благодаря этому пильный аппарат может выдвигаться влево на требуемое расстояние, а в транспортном положении располагаться за кабиной трактора над ходовой частью. Неподвижная балка крепится к правому лонжерону рамы трактора шарнирно, что позволяет ей вместе с пильным механизмом перемещаться относительно левого лонжерона.
Механизм направленной валки дерева состоит из поворотной 7 и выдвижной 1 балок, гидроцилиндра 4 выдвижения балки, гидроцилиндра 6 поворота балок и шарнирно соединенных тяги 2 и поворотного рычага 3 (рис. 3.14). Устанавливается он сверху на ограждении кабины трактора, и поворотная балка шарнирно крепится к ограждению 5. Благодаря этому обе балки могут поворачиваться в горизонтальной плоскости при валке дерева 10 гидроцилиндром 6. Для облегчения перемещения выдвижной балки установлены ролики 8 и 9: один 8 на заднем конце выдвижной балки, а два 9 на конце поворотной балки. При подаче рабочей жидкости в поршневую полость гидроцилиндра 4 с помощью поворотного рычага 3 и тяги 2 балка 1 выдвигается в левую сторону, а при подаче в штоковую полость – балка задвигается внутрь поворотной балки.
Валочно-пакетирующие машины. И в России, и за рубежом получили применение валочно-пакетирующие машины (ВПМ) манипуляторного типа. Они позволяют разрабатывать за один проход полосу леса шириной до 20 м (обычно 12...14 м), в значительной мере сохранять жизнеспособный подрост и при необходимости производить выборочную валку деревьев, спиливая с одного рабочего положения несколько деревьев.
ВПМ манипуляторного типа состоит из базового трактора и навесного технологического оборудования, смонтированного на платформе, установленной на раме (рис. 3.15, а) гусеничного или колесного шасси.
 |
Навесное технологическое оборудование предназначено для валки и пакетирования деревьев и состоит из основания 1,поворотной платформы 2, манипулятора 4 захватно-срезающего устройства (ЗСУ) 6, гидросистемы и кабины оператора.
Основание (рис. 3.15, б) изготовляется из швеллеров 14 и жестко крепится к раме трактора. На нем установлена неподвижно опорная часть 13 роликового поворотного круга с зубчатым венцом 9 внутри. Ролики 12 поворотного круга расположены крестообразно, и конструктивно он выполнен так, что может воспринимать значительные осевые нагрузки и моменты, а также радиальные силы, возникающие при работе машины.
Поворотная платформа 2 сварной конструкции, она крепится на вращающейся части роликового поворотного круга. На нее устанавливаются манипулятор, силовая установка (не всегда), кабина оператора и механизм поворота. При необходимости к поворотной платформе крепится контргруз.
Механизм поворота состоит из редуктора 11 и гидродвигателя. Ведущая шестерня 10 поворотного круга закреплена на вертикальном валу редуктора и входит в зацепление с зубчатым венцом 9 опорной части поворотного круга. При включении двигателя крутящий момент передается через редуктор на ведущую шестерню, которая, вращаясь, перемещается по зубчатому венцу и таким образом поворачивает платформу. Чтобы вращение поворотной платформы было плавным, крутящий момент на ведущую шестерню передается через постоянно включенную фрикци онную муфту. Для остановки поворотной платформы в требуемом положении на валу редуктора устанавливают тормоз.
Манипулятор – двухсекционный и состоит из стрелы 3 и рукояти 5, соединенных шарнирно (рис. 3.15, а). Нижним концом манипулятор шарнирно крепится к поворотной платформе 2, а верхний конец свободен и имеет проушину 7 для присоединения захватно-срезающего устройства. И на стреле и на рукояти имеются кронштейны для гидроцилиндров 8, при помощи которых изменяется вылет манипулятора.
Захватно-срезающее устройство (ЗСУ) предназначено для удержания дерева в процессе срезания и переноса его к месту укладки после того, как оно срезано (спилено). ЗСУ состоит из вертикальной стойки 15, захватов 17 и срезающего механизма 21 (рис. 3.15, в).
Вертикальная стойка служит основанием для захватов и пильного механизма, шарнирно крепится к свободному концу гидроманипулятора и может менять свое положение относительно манипулятора при помощи гидроцилиндра.
Захваты состоят из опорных призм 23, закрепленных на стойке 15, зажимных крюков 16 и гидравлического замка, предотвращающего самопроизвольное открытие захватов в случае обрыва шлангов или трубопроводов. Захват дерева производится в двух местах зажимными крюками, расположенными на опорных призмах. Крюки раскрываются и закрываются гидроцилиндрами 18. Для тонкомерных лесонасаждений на ЗСУ целесообразно иметь не два, а три захвата (один – внизу, два – в верхней части стойки с шарнирными концами зажимных рычагов), что позволит накапливать в ЗСУ несколько спиленных деревьев, а затем их переносить к месту укладки и таким образом повышать произ
 |
води-тельность ВПМ.
Гидрозамок препятствует выходу жидкости из рабочей полости гидроцилиндра захвата и работает следующим образом. При закрытии зажимных крюков жидкость под давлением идет в поршневую полость гидроцилиндра через гидрозамок в направлении из полости А в полость Б, открывая при этом клапан 1 (рис. 3.16, а). При прекращении подачи жидкости в гидроцилиндр клапан 1 под действием пружины 4 закрывается и препятствует движению жидкости в обратном направлении. Для открытия зажимных крюков рабочая жидкость подается в штоковую полость гидроцилиндра. При этом она одновременно давит и на плунжер 2 гидрозамка, перемещая его в сторону шарика 3 клапана 1. В результате клапан открывается и жидкость из поршневой полости гидроцилиндра свободно сливается, проходя через гидрозамок из полости Б в полость А. Машина ЛП-19А предназначена для валки деревьев и формирования их в пачки на земле в насаждениях с диаметром стволов деревьев на высоте груди до 60 см на лесосеках, расположенных в равнинной местности (уклон не более 8°) с удовлетворительной и хорошей несущей способностью грунтов.
3.3.4. Схемы разработки лент, делянок, лесосек
Для лесозаготовительной машины (ЛЗМ) с ее габаритами проход внутрь древостоя невозможен, за исключением тех, которые сконструированы специально для работы под пологом леса (например «Макери», рис. 2.17, б).
В зависимости от способа разработки лент различают машины фронтальные и фланговые. В соответствии с этим существуют различные схемы движения (маршруты) ЛЗМ по делянке (лесосеке). Для того чтобы рационально осуществить трелевку древесины, схемы движения ЛЗМ должны быть согласованы со схемой размещения трелевочных волоков на делянке.
Фронтальные машины могут двигаться по делянке челночным способом (рис. 3.17, а, б). Наряду с ЛЗМ, в частности ВПМ, по таким схемам могут работать ВСРМ (харвесторы).
Удельное время перехода машины между лентами  в расчете на одно дерево определится по формуле
в расчете на одно дерево определится по формуле
 , (3.33)
, (3.33)
где С – расстояние перехода ЛЗМ между лентами, м;  – скорость перехода между лентами, м/с;
– скорость перехода между лентами, м/с;  – число обрабатываемых деревьев на ленте.
– число обрабатываемых деревьев на ленте.
 , (3.34)
, (3.34)
где  – площадь разрабатываемой за один прием (без разворотов) ленты, м2; q – запас леса на 1 га, м3; V – средний объем хлыста;
– площадь разрабатываемой за один прием (без разворотов) ленты, м2; q – запас леса на 1 га, м3; V – средний объем хлыста;  – доля вырубаемого компонента.
– доля вырубаемого компонента.
Рис. 3.17. Схемы движения ЛЗМ по делянке: а, б – челночные; в, г, д – по односторонне расширяющемуся периметру; е, ж – по двухсторонне расширяющемуся периметру; з – по двухсторонне сужающемуся периметру; и – челночно-комбинированная; к – по расширяющейся спирали
 - граница лент;
- граница лент;  - технологический коридор (волок);
- технологический коридор (волок);
 ,
,  - переходы ЛЗМ на ленту;
- переходы ЛЗМ на ленту;  - маршрут трелевки (для ВТМ)
- маршрут трелевки (для ВТМ)
Подставляя значение  в формулу (3.33), получаем
в формулу (3.33), получаем
 . (3.35)
. (3.35)
Для схем на рис. 3.17, а, б расстояние перехода между лентами  , которое является одним из самых коротких, и поэтому данные схемы целесообразно использовать там, где это возможно.
, которое является одним из самых коротких, и поэтому данные схемы целесообразно использовать там, где это возможно.
Фронтальные ВПМ в целях сохранения подроста могут работать по схеме на рис. 3.17, в. Однако в этом случае расстояние перехода машины между лентами
 , (3.36)
, (3.36)
где m – число лент на делянке; Б – ширина делянки, м.
Схема может быть эффективна, если эффект от сохранения подроста превышает ущерб от значительных холостых ходов ВПМ.
Валочно-трелевочные машины флангового типа используются по схемам рис. 3.17, г, д. Здесь переход на следующую ленту осуществляется после трелевки, а длина ленты должна быть равна (рис. 3.17, г) или кратна (рис. 3.17, д) длине ленты набора пачки
 , (3.37)
, (3.37)
где М – объем трелюемой пачки, м3.
По схемам рис. 3.17, е, ж, з могут работать фланговые валочные машины. Среднее расстояние перехода между лентами: для схем е, з – С=Б/2, для схемы ж – С=А/2. В схеме е [по пат. №2041612]* лесосека располагается с двух сторон от лесовозной дороги. В схеме ж [по пат. №1662430] трелевка осуществляется к двум дорогам по расположенному в центре волоку.
Схема рис. 3.17, и [по АС №1731099] используется при размещении магистрального волока по диагонали. В этом случае расстояние перехода между лентами равно ширине ∆, зато средняя длина ленты, а следовательно и ее площадь в 2 раза меньше.
Для проведения машинным способом группово-постепенных рубок, а также рубок ухода за лесом рекомендуется схема рис. 3.17, к [по АС №2041612]* с движением ЛЗМ по расширяющейся спирали. Длина ленты и расстояние перехода между лентами должны рассчитываться при этом в зависимости от конкретных условий.
Производительность машины в этом случае зависит от объема хлыста, запаса леса на 1 га, ширины обрабатываемой ВПМ ленты и числа компонентов.
Технологическая схема разработки лесосек фронтальной ВПМ представлены на рис. 3.18. При этом ленты 4, обрабатываемые ВПМ 5, располагаются перпендикулярно лесовозной дороге 8. При движении ВПМ от уса ширина ленты ∆ будет на 1...3 м уже, чем при движении к усу, так как машина смещается в сторону вырубки (рис. 3.19). Это необходимо для свободного формирования пачек под углом, обеспечивающим удобство в работе ПТМ при трелевке комлями вперед. Ленты могут располагаться параллельно лесовозной дороге. В этом случае отпадает необходимость сужать ленту, так как пачки могут располагаться в след машины, либо под небольшим (10 – 15°) углом к нему (см. рис. 3.19, б). Укладка пачки в след машины способствует сохранению подроста на полосе шириной b, равной b = D – c, где с – ширина следа ВПМ. Работа по этой схеме может выполняться с подсортировкой леса. Для этого ВПМ укладывает деревья, обрабатываемые с одной рабочей позиции, в пачки первого 1 и второго 2 компонентов.
Площадь леса S, обрабатываемая с одной рабочей позиции ВПМ с достаточной точностью может быть определена по формуле
 , (3.38)
, (3.38)
где R, r – соответственно максимальный и минимальный вылеты манипулятора, м.
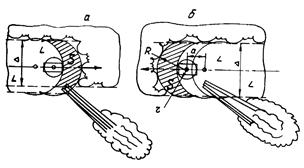
Рис. 3. 19. Схема работы грузонесущей ВПМ без ФУ
при ее движении: а – от уса; б – к усу
Пакетировочно-трелевочная машина 6, покомпонентно формируя полногрузные пачки, трелюет их на погрузочный пункт 9 в соответствующие штабеля. Перед началом разработки лесосеки могут прорубаться проходы 3, которые одновременно являются границами делянок.
3.3.5. Производительность валочных
и валочно-пакетирующих машин
Часовая и сменная производительность ВМ и ВПМ могут быть определены соответственно по формулам (2.54) и (2.58) с учетом, что А = V, где V – средний объем хлыста, м3. Время цикла обработки одного дерева найдется из выражений:
для ВМ рычажного типа
 ; (3.39)
; (3.39)
для ВПМ с грузонесущим манипулятором
 , (3.40)
, (3.40)
где  – время перехода ВМ между деревьями, с;
– время перехода ВМ между деревьями, с;  – время установки технологического оборудования (срезающего и сталкивающего устройств) в рабочее положение (у дерева), с;
– время установки технологического оборудования (срезающего и сталкивающего устройств) в рабочее положение (у дерева), с;  – время срезания дерева, с;
– время срезания дерева, с;  – время сталкивания дерева с пня и его падения, с;
– время сталкивания дерева с пня и его падения, с;  – время установки технологического оборудования в транспортное положение, с; – время перехода машины между лентами в расчете на одно дерево, с;
– время установки технологического оборудования в транспортное положение, с; – время перехода машины между лентами в расчете на одно дерево, с;  – время перехода ВПМ на смежную рабочую позицию в расчете на одно дерево, с;
– время перехода ВПМ на смежную рабочую позицию в расчете на одно дерево, с;  – время наведения ЗСУ на дерево, захвата, срезания и укладки дерева в пачку, с.
– время наведения ЗСУ на дерево, захвата, срезания и укладки дерева в пачку, с.
 ; (3.41)
; (3.41)  ; (3.42)
; (3.42)  , (3.43)
, (3.43)
где  – диаметр дерева в месте срезания, м;
– диаметр дерева в месте срезания, м;  и
и  – соответственно производительность (м2/с) и коэффициент использования производительности чистого пиления; С – среднее расстояние перехода машины между лентами, м; а – расстояние между смежными рабочими позициями ВПМ, м; u – скорость движения машин по лесосеке, м/с;
– соответственно производительность (м2/с) и коэффициент использования производительности чистого пиления; С – среднее расстояние перехода машины между лентами, м; а – расстояние между смежными рабочими позициями ВПМ, м; u – скорость движения машин по лесосеке, м/с;  – число деревьев, обрабатываемых на одной рабочей позиции.
– число деревьев, обрабатываемых на одной рабочей позиции.
Значения  и находятся соответственно по формулам (1.21) и (3.33).
и находятся соответственно по формулам (1.21) и (3.33).
 . (3.44)
. (3.44)
С учетом формулы (3.44) время
 (3.45)
(3.45)
По нашим исследованиям для машин типа ЛП-19А 
 , зависит в основном от объема хлыста V, м3, породы древесины и режима работы (выборочная рубка, с сохранением подроста, сплошная) ВПМ. Коэффициенты полинома a, b и g определяются путем статистической обработки достаточного числа хронометражных наблюдений по каждому режиму. Для условий наших исследований: при сплошной рубке ели a = 21,1, b = 38,6 и g = -20,5; при одновременной обработке хвойных и лиственных пород a = 32,4, b = 41 и g = 0; при рубках с сохранением подроста соответственно для ели a = 38,8, b = 19,5 и g = -16,5; для хвойных и лиственных пород a = 39,1, b = 32,8 и g = 0.
, зависит в основном от объема хлыста V, м3, породы древесины и режима работы (выборочная рубка, с сохранением подроста, сплошная) ВПМ. Коэффициенты полинома a, b и g определяются путем статистической обработки достаточного числа хронометражных наблюдений по каждому режиму. Для условий наших исследований: при сплошной рубке ели a = 21,1, b = 38,6 и g = -20,5; при одновременной обработке хвойных и лиственных пород a = 32,4, b = 41 и g = 0; при рубках с сохранением подроста соответственно для ели a = 38,8, b = 19,5 и g = -16,5; для хвойных и лиственных пород a = 39,1, b = 32,8 и g = 0.
* Пат. и А.С. получены автором либо при его участии
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 6611; Нарушение авторских прав?; Мы поможем в написании вашей работы!