КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Распределение активных нагрузок
|
|
|
|
В настоящее время к точности стабилизации частоты предъявляются высокие требования, что и обеспечивают современные регуляторы. Однако астатические характеристики регуляторов требуют, как было показано выше, соответствующих мер по обеспечению точности распределения активных нагрузок между параллельно работающими генераторными агрегатами. Сочетание высокой точности стабилизации частоты вращения с заданной точностью распределения активных нагрузок и обеспечивает метод мнимостатических характеристик.
Одной из первых систем автоматического регулирования частоты и распределения активной нагрузки является система типа УРЧН. В этой системе, как и в более поздних (УРМ-35), применяется принцип базового (ведущего) генератора. Регулятор частоты вращения базового генератора должен иметь астатическую скоростную характеристику. Регуляторы остальных агрегатов – статические. Любая система стабилизации частоты вращения содержит в своем составе механический центробежный регулятор. Известно, что изменение затяжки пружины в таких регуляторах с помощью серводвигателя приводит к перемещению их характеристик параллельно самим себе.
Поэтому, имея в системе неизменную частоту вращения у базового генератора, получаемую в рассматриваемых системах также воздействием на серводвигатель, но в функции от отклонения частоты сети, и перемещая статические характеристики других генераторных агрегатов параллельно самим себе, но в зависимости от разности активных нагрузок, добиваются астатического регулирования частоты и статического распределения нагрузок.
На рис. 11.4 показан идеализированный вариант такого распределения, когда и частота и распределение нагрузок регулируются астатически.
Рис. 11.4. Распределение активной нагрузки между параллельно работающими генераторами: 1 – базовый; 2,3 –ведомые.
Система автоматического регулирования частоты и распределения активной нагрузки типа УРЧН. На рис. 11.5 представлена блок-схема устройства регулирования частоты и распределения активной нагрузки. Она состоит из трех отдельных блоков: измерительного органа частоты, датчика активного тока и магнитного усилителя.
Для регулирования частоты в системе на вход магнитного усилителя базового агрегата подается сигнал с датчика частоты, который дает ток в обмотку управления магнитного усилителя при отклонении частоты в системе. Серводвигатель базового агрегата будет перемещать статическую характеристику, поддерживая частоту в системе неизменной. Появление разности сигналов в цепях датчиков активного тока вызовет появление токов в обмотках управления магнитных усилителей, и серводвигатели переместят статические характеристики первого и второго генераторов в общую точку.
В тех случаях, когда высокая стабильность частоты не нужна, у ведущего генератора отключается измерительный орган частоты, а напряжение выхода датчика активного тока подается на обмотку управления усилителя. Серводвигатели будут изменять характеристики регулирования до тех пор, пока они не пересекутся в одной точке, что будет соответствовать равномерному распределению нагрузок.
Устройство УРЧН обеспечивает в установившихся режимах точность поддержания заданной частоты в пределах ±0.5 % от номинального значения и точность распределения активной нагрузки не более 7…10 % при изменении суммарной нагрузки от 20 до 100 % от номинального значения с cos j = 0,6…1,0.
Рис. 11.5. Блок-схема устройства регулирования частоты и распеределения активной нагрузки (УРЧН).
Устройство распределения активной мощности типа УРМ-35. Устройство типа УРМ-35 предназначено для автоматического пропорционального распределения активной нагрузки между параллельно работающими синхронными генераторами электроэнергетических систем переменного тока. Использование данного устройства обеспечивает в статических режимах точность распределения активных нагрузок между параллельно работающими генераторами в пределах 5 % при изменении суммарной нагрузки системы от 20 до 110 % номинальной и изменении коэффициента мощности в пределах от 0,7 до 1,0.
Необходимым условием применения устройства УРМ-35 является возможность параллельного перемещения скоростных характеристик агрегата посредством воздействия на серводвигатель регулятора частоты вращения первичного двигателя в пределах ± 10 % от номинального значения. Соотношение мощностей параллельно работающих генераторов при использовании устройства УРМ-35 не должно быть более 1:5. Устройство содержит следующие блоки: датчик активного тока УРМ-35Д, формирователь импульсов УРМ-35Ф, усилитель УРМ-35У.
Блоки УРМ-35У имеют пять модификаций и предназначены для работы со следующими типами серводвигателей: УРМ-35У1 – с серводвигателем постоянного тока последовательного возбуждения напряжением 24 В и током до 10 А; УРМ-35У2 – с серводвигателем постоянного тока напряжением 110 В и током до 2,5 А; УРМ-35У3 – с серводвигателем постоянного тока независимого возбуждения напряжением 27 В и током до 2,5 А; УРМ-35У4 - с серводвигателем постоянного тока независимого возбуждения напряжением 110 В и током до 2,5 А; УРМ-35У5 – с двухфазными и трехфазными асинхронными двигателями напряжением 127 В и током до 2,5 А.
На рис. 11.6 приведена схема включения устройства УРМ-35 для электростанции с тремя генераторами.
Рис. 11.6. Схема включения блоков устройства УРМ-35 для трех ГА. М – серводвигатель; МИПТ – механизм изменения подачи топлива
Конструктивно функциональные блоки устройства размещены в двух корпусах. В одном корпусе (индекс УРМ-35Д) находится датчик активного тока, в другом (индекс УРМ-35ФУ) – формирователь и усилитель. Функциональный блок-усилитель выполнен сменным, что позволяет применять тот или иной тип усилителя в зависимости от типа принятого серводвигателя.
Количество датчиков и усилителей, а также типы усилителей, определяются составом оборудования, схемой генерирования и распределения электроэнергии.
На шины каждого генератора устанавливается датчик активного тока. Выходы датчиков соединяются по дифференциальной схеме. Коммутация дифференциальной цепи для случая параллельной работы двух и более генераторов производится контактами автоматов генераторов.
Так как выходы датчиков соединены между собой, то при равенстве нагрузок на генераторах напряжение на входах блоков УРМ-35ФУ равно нулю, и напряжение на их выходах тоже равно нулю. При неравенстве нагрузок генераторов датчики дают разный по величине выходной сигнал, что обусловливает на входах блоков УРМ-35ФУ напряжение. На выходах последних появляется сигнал, подаваемый на серводвигатели, которые воздействуют на регуляторы первичных двигателей таким образом, что выравнивают нагрузки на параллельно работающих генераторах.
Регулятор частоты и активной мощности типа РЧМ50. Электрический блок типа РЧМ50 регулирования частоты и активной мощности является частью комбинированной системы регулирования генераторных агрегатов. При этом первичные двигатели (ПД) укомплектованы штатными статическими регуляторами (РЧ).
РЧМ50 совместно с регулятором штатной системы обеспечивает:
- устойчивую длительную автономную и параллельную работу однотипных агрегатов, оснащенных аналогичными регуляторами во всем диапазоне нагрузок от 0 до 110 %;
- стабилизацию частоты агрегата в статическом режиме при автономной и параллельной работе с точностью ±2 %, при изменении нагрузки на валу от 0 до 100 %;
- максимальное отклонение частоты не более 2 % от номинального значения; продолжительность восстановления частоты до номинальной с точностью ±0,5 % не более 5 с при сбросах и набросах 100 %активной нагрузки;
- неравномерность распределения активной мощности в диапазоне нагрузок от 20 до 100 % суммарной номинальной мощности агрегатов не более 5 % номинальной мощности меньшего агрегата;
- автоматический вывод и работу на надсинхронной частоте до включения генераторного автомата с выдачей сигнала «Надсинхронные обороты»;
- подгонку частоты агрегата к частоте сети, лежащей в диапазоне 95…105 % номинальной частоты с точностью 0,4 Гц.
Функциональная схема системы автоматического регулирования первичных двигателей представлена на рис. 11.7.
В состав электрического блока входят: датчик активного тока интегрального канала ДАТ-Р; датчик активного тока канала регулирования по нагрузке ДАТ-Н; частотно-импульсный модулятор ЧИМ; интегратор И; импульсный датчик частоты ИДЧ; блоки питания БП1 и БП2; блок управления БУ; усилитель У. Интегратор И и усилитель У являются общими в режимах работы агрегата.
Для получения требуемых характеристик в динамических и статических режимах работы генераторного агрегата как при автономной, так и при параллельной работе в электрическом блоке РЧМ 50 объединены два канала регулирования: пропорционально-дифференциальный канал регулирования по возмущению (активной нагрузке); интегральный канал регулирования по отклонению.
Канал регулирования по возмущению включает в себя датчик активной мощности ДАТ-Н и при параллельной работе – уравнительную связь. Работа канала заключается в формировании сигнала, пропорционального активной мощности в статических режимах и определенным образом форсированного в динамических. Данный канал обеспечивает астатическую характеристику агрегата по основному возмущению за счет воздействия электромагнита Y A на систему топливоподачи агрегата.
При автономной работе выходная координата электромагнита определяется выходным сигналом датчика тока ДАТ-Н, который прямо пропорционален активной нагрузке регулируемого агрегата. Выходной сигнал датчика тока ДАТ-Н поступает на вход электромагнита Y A через усилитель У.
Электромагнит Y A входит в состав штатного регулятора частоты РЧ и представляет собой электромеханическое устройство, в котором обеспечивается пропорциональная зависимость между входным током управления и углом поворота якоря электромагнита.
При параллельной работе с помощью уравнительной связи между регуляторами параллельно работающими агрегатов (контакты реле К6 замкнуты) на вход усилителя У поступает сигнал, пропорциональный средней мощности нагрузки в долях номинальной мощности.
Для отключения канала регулирования по нагрузке имеются контакты реле К2, которые совместно с контактами реле К4 используются для перевода агрегата на работу по статической характеристике. Интегральный канал регулирования по отклонению участвует в трех режимах работы агрегата.
Рис. 11.7. Функциональная схема системы автоматического регулирования ГА с РЧМ50
Режим стабилизации частоты. Этот режим применяется при автономной и параллельной работе базового агрегата.
Интегральный канал при работе агрегата в режиме стабилизации состоит из датчика частоты ИДЧ, интегратора и усилителя У. Сигнал с ИДЧ, пропорциональный разности частот агрегата и эталонной частоты, через замкнутые контакты реле К3 и К4 поступают на вход интегратора И.
С выхода интегратора И сигнал поступает через усилитель У на электромагнит, который воздействует на систему топливоподачи таким образом, чтобы уменьшить до нуля отклонение регулируемой частоты от эталонной.
При работе генераторного агрегата с отключенным генераторным автоматом предусмотрен вывод агрегата на надсинхронную частоту вращения. При этом с датчика частоты ИДЧ на вход интегратора И поступает сигнал:
f = f p – (f эт + D f),
где f p - частота регулируемого агрегата; f эт - частота задатчика эталонной частоты; D f – частота, равная 0,4 Гц.
Режим подгонки частоты перед синхронизацией. Состав интегрального канала при работе агрегата в этом режиме тот же, что и при работе агрегата в режиме стабилизации частоты.
При подаче на вход датчика частоты ИДЧ сигнала от трехфазного источника в ИДЧ происходит автоматическое переключение и на его выходе появляется сигнал
f = f p – (f с + D f),
где f с - частота сети.
Выход агрегата на надсинхронную частоту необходим для исключения «зависания» агрегата при синхронизации, а также для двигательного режима.
Работа интегрального канала в этом режиме не отличается от его работы в режиме стабилизации частоты.
Режим распределения активных нагрузок. Этот режим имеет место при параллельной работе генераторных агрегатов, когда регулируемый агрегат является ведомым.
Интегральный канал при работе агрегата в режиме распределения активных нагрузок состоит из датчика частоты ДАТ-Р, частотно-импульсного модулятора ЧИМ, интегратора И и усилителя У.
Подключение интегрального канала в этот режим происходит за счет переключения входа интегратора И с выхода датчика частоты ИДЧ на выход частотно-импульсного модулятора ЧИМ при помощи контакта реле К5. Сигнал разности активных нагрузок формируется датчиком нагрузки ДАТ-Р и аналогичными датчиками в регуляторах параллельно работающих генераторных агрегатов, которые с помощью уравнительной связи, собираемой контактами реле К5, включаются по схеме вычитания.
Сигнал с выхода схемы вычитания поступает на вход интегратора через частотно-импульсный модулятор ЧИМ, в задачу которого входит преобразование сигнала разности активных нагрузок к виду, аналогичному выходному сигналу датчика частоты ИДЧ. С выхода интегратора сигнал поступает на вход усилителя и далее через электромагнит воздействует на систему топливоподачи агрегата. Если в любом из указанных режимов интегрального канала выходной сигнал интегратора И достигает одного или двух своих крайних значений, то происходит срабатывание реле управления серводвигателем, которое задает направление вращения серводвигателя в сторону увеличения или уменьшения уставки регулятора частоты вращения РЧ. В результате реакции всей динамической системы на работу серводвигателя на входе интегратора И появляется сигнал выхода из состояния насыщения. При этом отключится серводвигатель, а затем в процессе отработки появившегося сигнала рассогласования интегратор И установится в некоторое среднее состояние.
Все необходимые операции, зависящие от режима работы агрегата и связанные с коммутацией указанных в структурной схеме реле К1…К7, определяются работой блока управления БУ, получающего соответствующие указания от оператора и от регуляторов параллельно работающих агрегатов.
С помощью узла блока управления в электрическом блоке РЧМ 50 решаются следующие задачи:
- изменение структуры блока с целью обеспечения режимов работы агрегата: «ведомый» или «базовый» при параллельной работе и «стабилизация частоты» или «подгонка к частоте сети» при автономной работе;
- обеспечение работы агрегата на надсинхронной частоте по отношению к заданной при отключенном генераторном автомате и в режиме подгонки частоты;
- дистанционное и местное отключение всех каналов регулирования и каждого канала в отдельности;
- отключение интегральных каналов регулирования с выдержкой времени на их повторное включение при ручном управлении серводвигателем механизма изменения уставки штатного регулятора частоты вращения агрегата;
- автоматическая разгрузка агрегата по команде с пульта управления;
- выявление неисправности регулятора с последующим его отключением и выдачей соответствующего сигнала в пульт управления;
- организация уравнительных связей между блоками РЧМ50 параллельно работающих агрегатов с целью получения сигналов о средней нагрузке и разности нагрузок относительно базовых мощностей генераторов, а также отключения исправных блоков РЧМ50 при выходе из строя одного из них;
- выдача сигнала и выход на надсинхронные обороты.
Питание всех функциональных узлов регулятора осуществляется блоками питания БП1 и БП2.
Недостатком рассмотренного принципа распределения активной нагрузки «ведущий – ведомый» или «базового генератора» является то, что генераторы не равнозначны, и что в первый момент после наброса нагрузки она ложится на ведущий генератор, и только спустя некоторое время перераспределяется между генераторами поровну.
В настоящее время широко используется принцип формирования заданной мощности и регулирования по отклонению от заданной мощности (рис. 11.8). Основным преимуществом такого подхода является возможность модульного исполнения регуляторов с однотипными устройствами регулирования для всех генераторов.
Каждый параллельно работающий генератор имеет блоки распределения нагрузки, которые связаны между собой уравнительными соединениями.
Преобразователь мощности выдает стандартизованный сигнал напряжения, который, проходя через резистор R и попадая на уравнительный провод, усредняется. Средняя мощность подается на вход сумматора каждого из генераторов. На вход того же сумматора подается сигнал отклонения частоты (D f) от заданной системной частоты. С выхода сумматора снимается корректированная мощность, которая подается на вход второго компаратора (сравнивающее устройство - сумматор с одним инвертированным и одним прямым входами), выход которого подключен к дискриминатору, определяющему знак отклонения. Если отклонение в меньшую сторону подается сигнал «больше» в противном случае «меньше». Соответственно меняется уставка регулятора частоты вращения дизель-генератора, которая поднимает или опускает статическую характеристику дизеля, что, в свою очередь, приводит к перераспределению мощности между генераторами. Так происходит до тех пор, пока сигнал на выходе второго компаратора не станет равным нулю (с точностью, определяемой шириной мертвой зоной). Но это означает, что все генераторы будут иметь мощность равную средней, а отклонения частоты от заданной частоты не будет, что и требуется.
Рис. 11.8. Структура системы распределения активной мощности по принципу отклонения от заданной мощности
Реализацию данного принципа распределения активных нагрузок обеспечивает функциональное устройство LSU-114DG фирмы DEIF (рис. 11.9).

Рис. 11.9. Функциональное устройство LSU-114DG
Блок устанавливается на стандартной рейке DIN - 35 мм, или на монтажной панели. К каждому генератору подключается один блок.
Подключение блока осуществляется следующим образом (рис. 11.10):
· два входа по напряжению к фазам А и В;
· один вход по току через трансформатор тока к фазе А;
· выходы по частоте (FS) всех блоков объединяются для получения усредненной частоты;
· выходы по мощности (PS) всех блоков объединяются для получения усредненной мощности
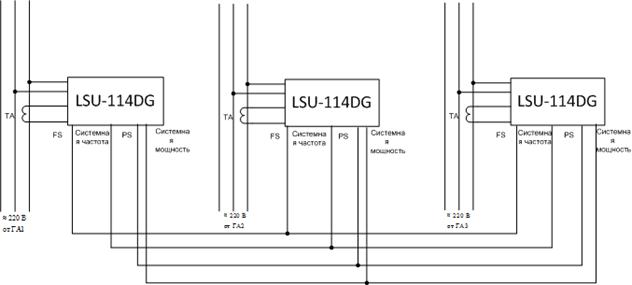
Рис. 11.10. Подключение устройств распределения активной нагрузки
· усредненное значение частоты (системная частота) подается на соответствующий вход блока;
· усредненное значение мощности (системная мощность) подается на соответствующий вход блока;
· два выхода для изменения частоты подключаются к контроллеру.
Каждый блок должен быть настроен на одинаковую частоту. При отклонениях частоты от требуемого значения и мощности генератора от значения системной мощности вырабатывается сигнал на изменения уставки частоты вращения ДПТ. Реализация осуществляется контроллером через выпрямитель.
В данном блоке помимо функции распределения активных нагрузок предусмотрена функция для запуска и остановки резервного генератора и для разгрузки останавливаемого ГА.
На рисунке 11.11 приведена принципиальная схема блока LSU-114DG.
|
Рис. 11.11. Принципиальная схема блока
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 6688; Нарушение авторских прав?; Мы поможем в написании вашей работы!