КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Динамічне балансування роторів при відомому розташуванні незрівноважених мас
|
|
|
|
Задачею динамічного балансування обертових мас є не тільки зведення центра мас до осі обертання, але і те, щоб головна центральна вісь інерції збігалася з віссю обертання. Якщо статичного зрівноваження обертових мас можна досягти за допомогою однієї противаги, то, як показано вище (див. рис. 14.16), динамічного — лише двома масами, встановленими у двох різних площинах.
Для прикладу розглянемо обертовий ротор (рис. 14.19), у площинах якого 1, 2, 3, що перпендикулярні до осі обертання, знаходяться незрівноважені маси т1 т2, т3. Положення незрівноважених мас у цих площинах задані радіусами-векторами r1, r2, r3. Положення площин 1, 2, 3 відносно площини зведення I визначаються відповідно координатами Z1, Z2, Z3. Противаги встановлюються у площинах I і II відстань між якими l. Позначимо масу противаги при статичному зрівноваженні через тп, а радіус-вектор, який визначає положення центра мас через rn. Тоді умовою зрівноваженості ротора буде такою:
 (14.62)
(14.62)
тобто для статичного зрівноваження обертових мас необхідно забезпечити суму статичних дисбалансів рівною нулю.
Як відомо з викладеного вище, для повного зрівноваженняротора необхідно встановити дві противаги, які розміщують удвох площинах I і II. Позначимо маси цих противаг т1 і тn, арадіуси-вектори, що визначають їх положення відносно їх осіобертання, через rn, і rn. Тоді умовами повного зрівноваження будуть
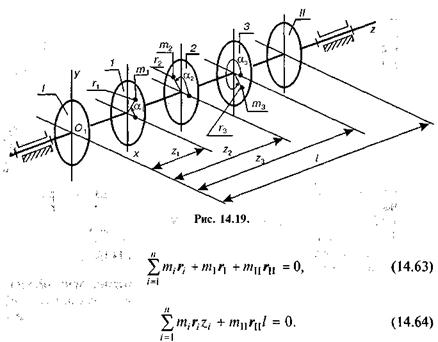
Отже, для динамічного зрівноваження обертових мас необхідно, щоб суми статичних і динамічних дисбалансів дорівнювали нулю.
При повному (динамічному) зрівноваженні спочатку будують векторний багатокутник динамічних дисбалансов за рівнянням (14.64). При цьому вектори динамічних дисбалансів зручно повернути на 90° так, щоб вони збігалися з напрямками відповідних сил інерції
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 947; Нарушение авторских прав?; Мы поможем в написании вашей работы!