КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основные понятия и определения. Кинематический анализ рычажных механизмов
Кинематический анализ рычажных механизмов.
Пространственные механизмы.
В пространственном механизме оси непараллельны, звенья могут двигаться в разных плоскостях.
Wпр= 6n - (S1+ S2+ S3+ S4+ S5)
Допустим, что механизм, изображенный на рис.1.2.1 – пространственный и все кинематические пары 5-го класса, т.е. одноподвижны AV,BV,CV,DV, тогда
Wпр= 6n - (5pV+4pIV+3pIII+2pII+pI)
Wпр= 6.3 - 5.4 = -2 à статически неопределимая ферма.
Для получения Wдейств=0, необходимо добавить 3 движения.
q= Wдейств - Wпр = 1 - (-2) = 3,
где q – избыточные связи.
Для того чтобы их устранить, надо изменить класс некоторых кинематических пар, при этом нельзя изменять класс КП А. Поэтому, сделаем КП В – сферическим шарниром, т.е. 3-го класса (добавим 2 подвижности), а КП С – 4-го класса (добавим 1 подвижность). Тогда
Wпр= 6.3 - (5.2 + 4.1 + 3.1) = 18 - 17 = 1
n
ФОРМУЛА СОМОВА-МАЛЫШЕВА: Wпр= 6.n - ΣSi + q
i=1
Зависимость линейных координат в какой-либо точке механизма от обобщенной координаты – линейная функция положения данной точки в проекциях на соответствующие оси координат.
Хс= f(j1)
Зависимость угловой координаты какого-либо звена механизма от обобщенной координаты – угловая функция положения данного звена.
j2= f(j1)
Первая производная линейной функции положения точки по обобщенной координате – линейная передаточная функция данной точки в проекциях на соответствующие оси координат (иногда называют «аналог линейной скорости…»)








полная скорость т. С будет 
Первая производная угловой функции положения звена по обобщенной координате – передаточное отношение.

Вторая производная линейной функции положения по обобщенной координате – аналог линейного ускорения точки в проекциях на соответствующие оси.


Вторая производная угловой функции положения звена по обобщенной координате – аналог углового ускорения звена.
Основными задачами кинематического исследования движения звеньев механизма являются:
1) определение положения звеньев и траекторий заданных точек;
2) определение линейных и угловых скоростей и ускорений звеньев и отдельных точек механизма.
Для этой цели применяются следующие методы:
a) графический (планы скоростей и ускорений);
б) графоаналитический (метод диаграмм);
в) аналитический.
Методы а и б уступают в точности аналитическому, но обладают простотой и наглядностью.
Для выполнения анализа движения звеньев механизма должны быть заданы:
а) схема механизма и
б) размеры его звеньев, а так же
в) функция зависимости перемещений ведущих звеньев от параметра времени или др. параметров их движения.
Построение планов механизма имеет целью определение относительных расположений звеньев и траекторий движения их точек по заданным положениям ведущих звеньев. Решение этой задачи производится при помощи метода засечек.
Планом механизма называют масштаб графического изображения кинематической схемы соответствующей заданному положению входного звена.
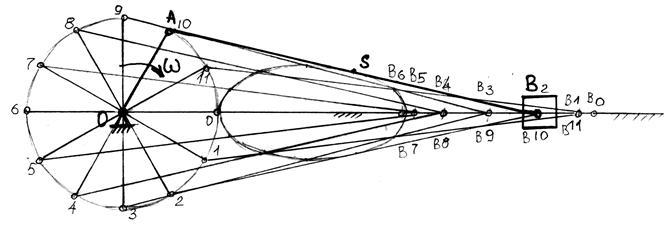 Рис 1.
Рис 1.
Определение скоростей и ускорений методом построения кинематических диаграмм.
Кинематической диаграммой принято называть зависимость какого-либо параметра движения звена от времени или параметра перемещения ведущего звена, представляемую графически кривой в прямоугольной системе координат.
Наивысший интерес представляют графики S, V, W ведомых звеньев. В качестве параметра S ведущего звена могут быть выбраны либо угол поворота, либо одна из координат принадлежащей ему точки. Эти параметры связаны с параметром времени.
Как известно, функции S,V и W движения какой-либо точки могут быть определены при помощи дифференцирования или интегрирования.
|
|
Дата добавления: 2014-01-20; Просмотров: 346; Нарушение авторских прав?; Мы поможем в написании вашей работы!