КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Определение минимального радиуса кулачковой шайбы по известному закону движения толкателя
|
|
|
|
а) для кулачка с поступательно движущимся толкателем:
Дано: sB=f(φ1); vB= f(φ1); [θ]
Определить: ro min
при условии, что угол давления в любой точке профиля кулачка не превышает допустимый.
Порядок построения графика кинематических отношений:
1. проводится вертикальная ось sB,мм вдоль которой от произвольно выбранной точки Во (начало отсчета) откладываются отрезки перемещения т.В, взятые с графика sB=f(φ1). Масштаб по оси μs* перемещений может быть равен масштабу графика перемещений μs.
2. 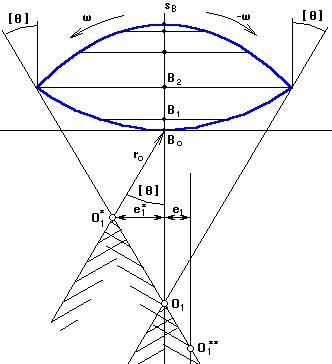 в каждой из полученных точек определяют отрезки кинематических отношений, посчитанные в масштабе μs*, и откладывают их под углом в 90º по направлению вращения кулачка.
в каждой из полученных точек определяют отрезки кинематических отношений, посчитанные в масштабе μs*, и откладывают их под углом в 90º по направлению вращения кулачка.
 мм
мм
Там, где отрезок имеет максимальное значение, восстанавливается перпендикуляр, и под углом [θ] проводится луч.
3. Если учитывать реверс, то второй луч проводят под углом [θ] через отрезок кинематических отношений, отложенный под углом в 90º по направлению реверса и имеющий максимальное значение.
Если реверс не учитывать, второй луч проводят через т.Во под углом [θ]. Если допускается внеосность, то она будет равна е1*. Если внеосность равна нулю, то центр кулачка будет в т.О1:
ro = O1Bo
Если внеосность задана в техническом задании, например левая, то проводят прямую, параллельную прямой О1Во и отстоящая от нее на расстоянии, равном величине внеосности е1, с учетом масштаба μs*. В итоге получают точку О1**.
б) для кулачка с качающимся толкателем:
Порядок построения: В произвольном месте выбирается точка Со, из которой радиусом, равным длине толкателя, проводят дугу окружности. По хордам откладывают перемещения т.В. Полученные точки последовательно соединяют с т.Со.
1. На этих прямых и на их продолжении откладываются отрезки кинематических отношений, посчитанные в масштабе μs* по вышеприведенной формуле. Там, где отрезок имеет максимальное значение, восстанавливается перпендикуляр, и под углом [θ] проводится луч.
2. 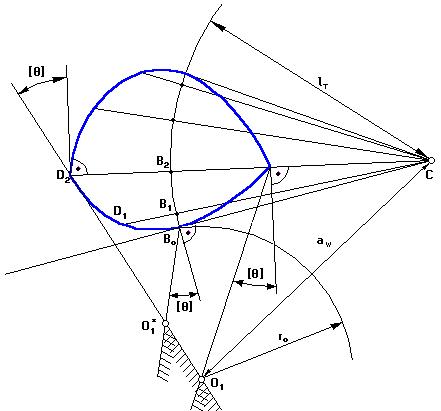 Если учитывать реверс, то второй луч проводят под углом [θ] через отрезок кинематических отношений, отложенный под углом в 90º по направлению реверса и имеющий максимальное значение. Центр кулачка будет в т.О1*:
Если учитывать реверс, то второй луч проводят под углом [θ] через отрезок кинематических отношений, отложенный под углом в 90º по направлению реверса и имеющий максимальное значение. Центр кулачка будет в т.О1*:
ro = O1Bo
Если реверс не учитывать, то второй луч проводят через т.Во под углом [θ]. Центр кулачка будет в т.О1*:
ro = O1*Bo
|
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 335; Нарушение авторских прав?; Мы поможем в написании вашей работы!