КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Степень подвижности пространственных
|
|
|
|
КЛАССИФИКАЦИЯ МЕХАНИЗМОВ
КЛАССИФИКАЦИЯ КИНЕМАТИЧЕСКИХ ЦЕПЕЙ
КЛАССИФИКАЦИЯ КИНЕМАТИЧЕСКИХ ПАР
В
КЛАССИФИКАЦИЯ ЗВЕНЬЕВ В МЕХАНИЗМАХ
Твердые тела, из которых образуется механизм, называются звеньями.
Звено – это деталь, либо совокупность деталей, соединенных в одну неизменную систему.
Звенья механизмов на схемах изображаются упрощенно в виде линий или геометрических фигур. Условное изображение механизма называют структурной схемой (моделью) механизма.
Структурная схема (модель) – безмасштабное графическое изображение механизма с применением условных обозначений звеньев и кинематических пар. Если структурную схему выполнить в масштабе, то получится кинематическая схема (модель) механизма.
Звенья бывают подвижные и неподвижные.
Неподвижное звено механизма называется стойкой или опорой. Неподвижное звено на кинематических схемах показывается штриховкой (рисунок 1.1).
а) б) в)
 | |||||||
 | |||||||
 | |||||||
 | |||||||
а - для вращательных кинематических пар;
б, в - для поступательных кинематических пар
Рисунок 1.1 - Изображение неподвижных звеньев
Подвижные звенья классифицируют по характеру движения:
|
 |
 1
1
 О
О





 ω1=const
ω1=const

 3 4
3 4

 б)
б)
 | |||||
 | | ||||
 |
3 4





 в) 3 4
в) 3 4
 | |||||||
| |||||||
 | |||||||
| |||||||


 О3 3
О3 3
О3 ω3


 ω3
ω3
г)



 3
3

 A
A


 2
2
C ω3


 4
4

 д) А
д) А
 |
В
Рисунок 1.2, а-д - Изображение
подвижных звеньев

 е) А 2 3
е) А 2 3
Рисунок 1.2, е - Изображение
подвижных звеньев
или начальные), ведомые (выходные, рабочие) и промежуточные (соединительные).
Ведущее (начальное) – звено, закон движения которого задан. Сумма элементарных работ приложенных к нему внешних сил положительна. Ведущее звено приводит в движение весь механизм. За ведущее звено принимается кривошип, реже ползун.
Ведомое (рабочее) – звено, совершающее требуемое движение, для которого предназначен механизм. Сумма элементарных работ приложенных к нему внешних сил равна нулю.
Промежуточные (соединительные) – звенья, соединяющие ведущее звено с рабочим.
Кинематическая пара – подвижное соединение двух соприкасающихся звеньев.
По характеру соединений двух соприкасающихся звеньев кинематические пары делятся на поступательные и вращательные.
Если два звена движутся относительно друг друга вращательно, то получается вращательная кинематическая пара (шарнирное соединение), если поступательно - то поступательная кинематическая пара (цилиндр движется внутри поршня). Кинематические пары изображены на рисунке 1.3.
а) А б) В






 1 2 3
1 2 3



 4
4
а - вращательная; б - поступательная
Рисунок 1.3 - Изображение кинематической пары
Известно, что твердое тело, движущееся в пространстве, обладает шестью видами движений (тремя вращательными вокруг осей X, Y, Z и тремя поступательными относительно тех же осей), т.е. обладает шестью степенями свободы (рисунок 1.4).
|

 z
z
 | |||
 |
y x
Рисунок 1.4
Таблица 1.1 - Классификация кинематических пар
| Класс пары | Число условий связи | Число степеней свободы | Название пары | Рисунок | Условное обозначение |
| I | шар-плоскость | 
| 
| ||
| II | шар-цилиндр; цилиндр - плоскость | 
| 
| ||
| III | сферическая | 
| 
| ||
| III | плоскостная | 
| 
| ||
| IV | цилиндрическая | 
| 
| ||
| IV | сферическая с пальцами | 
| 
| ||
| V | поступательная | 
| 
| ||
| V | вращательная | 
| 
| ||
| V | винтовая | 
| 
|
Кинематическая пара I-го класса (р1) получается, когда на нее накладывается одна связь, т.е. нет одного движения, допустим по оси Z.
Если на кинематическую пару накладываются две связи, то получается кинематическая пара II-го класса (р2); если 3 связи - то III-го класса (р3) и т.д.
Классификация кинематических пар в зависимости от числа степеней свободы и от количества наложенных связей представлена в таблице 1.1.
По характеру соприкосновения кинематические пары делятся на высшие и низшие.
Высшие кинематические пары р4 (двухподвижные или пары IV класса) - такие, при которых соприкосновение звеньев происходит в точке или по линии. Примером такой пары являются: шар-плоскость, контакт 2-х зубьев.
Низшие кинематические пары р5 (одноподвижные или пары V класса) - такие, при которых соприкосновение звеньев происходит по плоскости или по поверхности. Примером такой пары является шарнирное соединение.
Кинематическая цепь - система звеньев, связанных между собой кинематическими парами.
а) В 3 С б) А 2 В А 2 В С









 2 4 1
2 4 1
 3 1 3 4
3 1 3 4


 А С С 4
А С С 4
1 5
В 2 С A 2 B





 в) 1 3 г) 1 3
в) 1 3 г) 1 3
А F C





 D G
D G
6 4 6 4
 F E E D
F E E D
5 5
а - простые и незамкнутые; б - сложные и незамкнутые; в - простые
и замкнутые; г - сложные и замкнутые
Рисунок 1.5 - Изображение кинематических цепей
Кинематические цепи делятся на:
Ø простые – такие, у которых каждое звено входит не более чем в две кинематические пары (рисунок 1.5, а, в);
Ø сложные – такие, у которых имеется хотя бы одно звено, входящее более чем в две кинематические пары (рисунок 1.5, б, г);
Ø замкнутые цепи – такие, звенья которых образуют один или несколько замкнутых контуров (рисунок 1.5 в, г);
Ø незамкнутые (открытые) цепи – такие, звенья которых не образуют замкнутых контуров (рисунок 1.5 а, б);
Ø плоские цепи – такие, все точки которых движутся в одной или параллельных плоскостях (рисунок 1.5 а - г);
Ø пространственные цепи – такие, все точки которых описывают пространственные кривые.
Механизм – искусственно созданная кинематическая цепь, совершающая вполне определенные движения.
В простейшей интерпретации: механизм – это кинематическая цепь + двигатель. Из этого вытекает, что в любом механизме есть одно или несколько ведущих звеньев (см. § 1.1). Поэтому ясно, что сумма элементарных работ всех внешних сил, приложенных к ведущему звену, положительна, а для ведомого звена – равна нулю.
Так как механизм состоит из кинематических цепей, то также как и кинематические цепи, механизмы делятся на плоские и пространственные, простые и сложные.
Плоские механизмы – такие, все звенья которых движутся в одной или параллельных плоскостях.
Пространственные механизмы – такие, все звенья которых описывают пространственные кривые.
Простой – механизм, состоящий не более чем из четырех звеньев.
Сложный – механизм, состоящий из более чем четырех звеньев.
Также все механизмы классифицируют по конструктивной схожести.
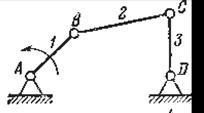
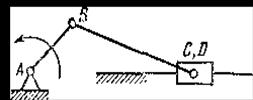
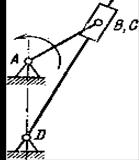
Ø Рычажные (в других источниках – стержневые) – это механизмы, звенья которых при соединении образуют между собой только низшие кинематические пары. Они применяются для преобразования движения или передачи силы в машинах. Простые (типовые, частные) рычажные механизмы состоят из четырех звеньев и подразделяются на коромысловые, кривошипно-ползунные, кулисные (рисунок 1.6, а-в). Рычажные механизмы получили широкое применение благодаря их долговечности, надежности и простоте. Кривошипно-ползунные механизмы (рисунок 1.6, а) применяются в двигателях внутреннего сгорания, компрессорах, насосах и т.д. В этих механизмах вращательное движение преобразуется в возвратно-поступательное и наоборот. Коромысловые механизмы (рисунок 1.6, б) применяются в зерноуборочных комбайнах, в стогометателях, в пресс-подборщиках, качающихся конвейерах и т.д. Кулисные механизмы (рисунок 1.6, в) получили широкое применение в строгальных, зубодолбежных станках. Обычно у них длительный рабочий ход и быстрый, обеспечивающий возврат резца в исходное положение, холостой ход. Большей частью кулисные механизмы применяются в практике с дополнительной структурной группой. Пространственные рычажные механизмы получили более широкое применение в робототехнике, чем плоские. На их основе создаются различные роботы и манипуляторы. Особенностью этих механизмов является то, что они имеют незамкнутую кинематическую цепь, обладают большим числом степеней свободы, а значит, имеют много приводов. Согласованная работа приводов звеньев обеспечивает перемещение руки захвата по рациональной траектории в заданное место.
а)
| б)
| в)
|
а - коромысловый; б - кривошипно-ползунный; в – кулисный
Рисунок 1.6 - Типовые (частные) рычажные механизмы
Разновидностью кулисного механизма является мальтийский механизм. Он относится к механизму прерывистого движения.
Ø Зубчатые механизмы. Если в состав механизма входят зубчатые звенья, то такой механизм называется зубчатым. Зубчатые механизмы представляют собой трехзвенный механизмы с высшей кинематической парой и предназначен для сообщения непрерывного вращательного движения с заданным отношением угловых скоростей. Их также называют еще зубчатыми передачами. При помощи зубчатых колес можно осуществить передачу движения между валами как с неподвижными осями, так и с перемещающимися в пространстве.
Разновидностью зубчатых передач являются храповые и цевочные механизмы. Храповые механизмы предназначены для осуществления движения только в одном направлении. Они применяются в станках, грузоподъемных машинах, часовых механизмах, а также в передачах периодического движения. Цевочный механизм служит для передачи вращательного или поступательного движения, в котором одно из звеньев имеет зубья, выполненные в виде круглых цилиндров (цевок), а зубья второго звена имеют сопряженный профиль.
Более подробно зубчатые механизмы рассмотрены в гл. 4, § 2.
Ø Кулачковые механизмы. Механизмы, в состав которых входит звено, имеющее переменный профиль (кулачок), называют кулачковыми. Они применяются для сообщения ограниченного движения ведомому звену по заданному или выбранному закону. Ведомое звено (толкатель) и ведущее звено (кулачок) могут совершать поступательное, вращательное или сложное движения. Кулачковые механизмы используются как в рабочих машинах, так и в приборных устройствах для реализации необходимых законов движения ведущих звеньев. Например, они применяются в газораспределительных механизмах для открывания и закрывания впускных клапанов и т.д. Подробно кулачковые механизмы будут рассмотрены в главе 4, § 1.
Ø Фрикционные механизмы – такие механизмы, в которых передача движения между соприкасающимися телами осуществляется за счет сил трения. Фрикционные механизмы нашли широкое применение в приборах, станках, транспорте, вариаторах (механизмах с плавной регулировкой числа оборотов).
Ø Механизмы с гибкими звеньями. В таких механизмах в качестве гибких звеньев, передающих движение от одного тела к другому, используются различной формы поперечного сечения ремни, канаты, цепи и др. Они применяются, если необходимо передать на относительно большое расстояние механическую энергию из одной точки пространства в другую. Передачи с гибкими звеньями широко применяются в машиностроении, приборостроении и в других отраслях промышленности. Подробно эти механизмы рассматриваются в курсе деталей машин.
Ø Клиновые механизмы применяются в различного вида зажимных приспособлениях или в устройствах, в которых требуется создать большие усилия на выходной стороне при ограниченных силах, действующих на входной стороне. Клиновые механизмы состоят из поступательных кинематических пар V класса. Они могут быть плоскими и пространственными. Чаще применяются в комбинации с другими механизмами. Отличительной особенностью этих механизмов является простота и надежность конструкции.
Ø Резьбовые (винтовые) механизмы. Механизмы, имеющие в своем составе кинематическую пару «винт-гайка», называют резьбовыми. Резьбовые механизмы применяются для преобразования вращательного движения в поступательное. Они используются в металлорежущих станках, прессах, различных приборах, измерительных устройств, домкратах и др. механизмах.
Ø Гидравлические и пневматические механизмы подробно рассматриваются при изучении других предметов.
Широкое применение нашли комбинированные механизмы, например рычажно-зубчатые, кулачково-зубчатые и др.
|
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 638; Нарушение авторских прав?; Мы поможем в написании вашей работы!