КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Уравнение Хилла. Мощность одиночного сокращения
|
|
|
|
Последовательный элемент определяет упругость актин-миозинового комплекса, обусловленную, прежде всего, местами прикрепления актина к Z-дискам и местами соединения мостиков с активными центрами тонких нитей.
Вязкий элемент η обусловлен скольжением нитей актина относительно миозина. Эта компонента резко возрастает при пассивном режиме мышцы, так как в этом случае мостики разомкнуты. Это проявляется в возможности сильного растяжения пассивной мышцы даже при незначительных нагрузках.
Активное сокращение мышцы.
Для исследования характеристик сокращающихся мышц используют два искусственных режима:
1. Изометрический режим, при котором длина мышцы l =const, а регистрируется развиваемая сила F(t).
 2. Изотонический режим, при котором мышца поднимает постоянный груз Р=const, а регистрируется изменение ее длины во времени Δ l(t).
2. Изотонический режим, при котором мышца поднимает постоянный груз Р=const, а регистрируется изменение ее длины во времени Δ l(t).
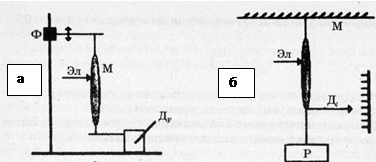
Рис. 6. Схемы опытных установок для реализации в эксперименте изометрического (а) и изотонического (б) режимов (ДF- датчик силы, Д - датчик изменения длины, М - мышца, Эл – электроды стимуляции, Р - нагрузка, Ф - фиксатор длины).
При изометрическом режиме с помощью фиксатора (рис. 6, а) предварительно устанавливают длину мышцы l. После установки длины на электроды Э подается электрический стимул и с помощью датчика регистрируется функция F(t). Вид функции F(t) в изометрическом режиме для двух различных длин представлен на рис. 7, а.
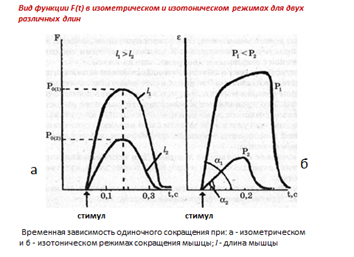
Рис. 7. Временная зависимость одиночного сокращения при: а - изометрическом и б - изотоническом режимах сокращения мышцы; l - длина мышцы.
Максимальная сила Р0, которую может развивать мышца, зависит от ее начальной длины и области перекрытия актиновых и миозиновых нитей, в которой могут замыкаться мостики: при начальной длине саркомера 2,2 мкм в сокращении участвуют все мостики. Поэтому максимальная сила генерируется тогда, когда мышца предварительно растянута на установке (рис. 6, а) так, чтобы длины ее саркомеров были близки к 2,2 мкм. На рис. 7, а это соответствует начальный длинам двух мышц 11 и 12. Но так как количество мостиков в мышце 11 больше, чем в 12 (11 > 12), то сила, генерируемая 11 больше.
При изотоническом режиме к незакрепленному концу мышцы подвешивают груз Р (рис.6, б). После этого подается стимул и регистрируется изменение длины мышцы во времени: Δ l(t). Вид этой функции в изотоническом режиме для двух различных нагрузок показан на рис.7, б.
Как следует из рис. 7.б, чем больше груз Р, тем меньше укорочение мышцы и короче время удержания груза. При некоторой нагрузке Р = Р0 мышца совсем перестает поднимать груз; это значение Р0 и будет максимальной силой изометрического сокращения для данной мышцы (рис. 7, а).
Здесь важно отметить, что при увеличении нагрузки угол наклона восходящей части кривой изотонического сокращения уменьшается (рис. 7, б): α2 < α1. Другими словами, скорость укорочения с ростом нагрузки падает.
Зависимость скорости укорочения от нагрузки Р является важнейшей при изучении работы мышцы, так как позволяет выявить закономерности мышечного сокращения и его энергетики. Она была подробно изучена при разных режимах сокращения Хиллом и представлена на рис. 8. Им же было предложено эмпирическое выражение, описывающее эту кривую:
V(P)=b(P0-P)/P+a
Это выражение называется уравнением Хилла и является основным характеристическим уравнением механики мышечного сокращения. P0 - максимальное изометрическое напряжение, развиваемое мышцей, или максимальный груз, удерживаемый мышцей без ее удлинения; b - константа, имеющая размерность скорости, а - константа, имеющая размерность силы.
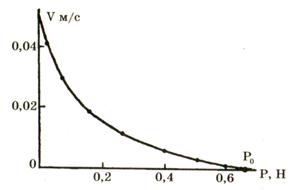
Рис. 8. Зависимость скорости одиночного сокращения мышцы от нагрузки
Из уравнения (V(P)=b(P0-P)/P+a) следует, что максимальная скорость развивается
при Р = 0:
Vmax = P0 b/a
При Р = P0 получаем V = 0, то есть укорочение не происходит. Работа А, производимая мышцей при одиночном укорочении на величину Δ1 равна:
А = РΔ1
Эта зависимость, очевидно, нелинейная, так как V = f(P). Но на ранней фазе сокращения можно пренебречь этой нелинейностью и считать V = const. Тогда
Δ1 = VΔt,
а развиваемая мышцей мощность W = dA/dt имеет вид: W = PV.
Исходя из этого, получим зависимость мощности от развиваемой силы Р:
W(P) = PV = b(P0-P)/ P+а · P
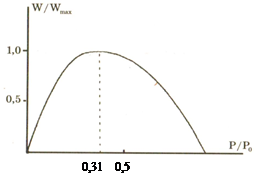 Функция W(P) имеет колоколообразную форму и представлена следующим образом:
Функция W(P) имеет колоколообразную форму и представлена следующим образом:
Рис. 9. Зависимость мощности мышцы от нагрузки
Эта кривая, полученная из уравнения Хилла, хорошо согласуется с результатами опытов. Мощность равна нулю при Р = P0 иР = 0 и достигает максимального значения при оптимальной величине нагрузки Ропт:
 Ропт = √a(P0 + a)-a, то есть когда Р = 0,31 Р0.
Ропт = √a(P0 + a)-a, то есть когда Р = 0,31 Р0.
Эффективность работы мышцы при сокращении может быть определена как отношение совершенной работы к затраченной энергии ΔЕ:
ξм= А/ΔЕ
Развитие наибольшей мощности и эффективности сокращения достигается при усилиях 0,3 - 0,4 от максимальной изометрической нагрузки Р0 для данной мышцы. Это используют, например, спортсмены-велогонщики: при переходе с равнины на горный участок нагрузка на мышцы возрастает и спортсмен переключает скорость на низшую передачу, тем самым уменьшая Р, приближая ее к Ропт. Практически эффективность может достигать значений 40 - 60 % для разных типов мышц. Самая высокая эффективность наблюдается у мышц черепахи, достигающая 75 - 80 %.
|
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 1971; Нарушение авторских прав?; Мы поможем в написании вашей работы!