КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Синтез структурных групп с помощью структурных формул
|
|
|
|
Кинематические цепи, обладающие нулевой подвижностью относительно внешних кинематических пар и не распадающиеся на более простые цепи, удовлетворяющие этому условию, получили название структурных групп или групп Ассура.
Структурную формулу любого простого или сложного механизма. образованного с помощью структурных групп, можно представить следующим образом:
 Слайд№ 2 (3.1)
Слайд№ 2 (3.1)
где W - подвижность синтезируемого механизма;  - подвижность элементарного механизма;
- подвижность элементарного механизма;  - подвижность структурной группы; m - число элементарных первичных механизмов; n - число присоединяемых структурных групп; i =1, 2,... m; j =1, 2,... n.
- подвижность структурной группы; m - число элементарных первичных механизмов; n - число присоединяемых структурных групп; i =1, 2,... m; j =1, 2,... n.
Так как подвижность присоединяемых (ой) структурных(ой) групп(ы) равна нулю, то  , а значит, (3.1) эквивалентно выражению:
, а значит, (3.1) эквивалентно выражению:
 (3.2)
(3.2)
Анализ (3.2) показывает, что присоединяемые к элементарному механизму структурные группы не влияют на подвижность простого или сложного механизма. Они только изменяют его структуру и законы движения звеньев.
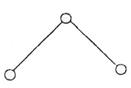
Структурная группа, существующая в трехподвижном пространстве и имеющая только одноподвижные кинематичесие пары, в соответствии с (3.7) должна состоять из двух звеньев и трёх одноподвижных кинематических пар. Эта группа носит название диады Сильвестера или двухповодковой группы и приведена на рис. 3.3, а.
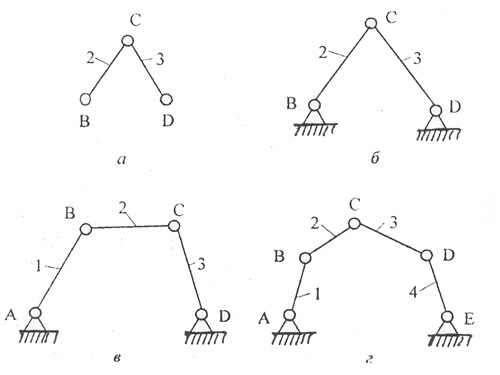
Рис. 3.3. Двухповодковая структурная группа и простые механизмы на её основе:
а - диада Сильвестера; б - статически определимая ферма, в - одноподвижный четырехзвенник;
г - двухподвижный пятизвенник; 1, 2... 4 ~ подвижные звенья; А, В... Е - кинематические пары
Если двухповодковую группу связать шарнирами В и D со стойкой, то получим элементарную статически определимую ферму (рис.3.3, 6).
Присоединив эту двухповодковую структурную группу к одному неподвижному и одному или двум подвижным звеньям 1 и 4 элементарных механизмов, получим простой механизм с одной (рис.3.3, в) или двумя (рис.3.3, г) степенями свободы.
Анализ (3.6),...,(3.10) показывает, что, задаваясь различными кинематическими парами и звеньями для каждого пространства, можно синтезировать множество структурных групп.
Рассмотрим синтез структурных групп с помощью структурных формул на примере наиболее распространенных в технике механизмов, которые существуют в трехмерном (М=3) трехподвижном (П=3) пространстве, допускающем два поступательных перемещения вдоль осей X и Y и одно вращательное вокруг оси Z.
Структурная формула групп Ассура для механизмов, существующих в трехподвижном пространстве, имеет вид (3.7)
Уравнение (3.7) для структурных групп в трехподвижном пространстве, можно переписать в виде:
 (3.11)
(3.11)
Решив (3.11) относительно числа одноподвижных кинематических пар, получим
 (3.12)
(3.12)
Равенство (3.12) устанавливает связь между числом кинематических пар и подвижных звеньев, входящих в структурную* группу. Так как число звеньев и кинематических пар в группе Ассура может быть только целым числом, условию (3.12) могут удовлетворять следующие сочетания чисел звеньев и кинематических пар
| n | … | ||||
| P1 | … |
Первое из этих соответствий между подвижными звеньями и кинематическими звеньями реализуется в рассмотренной диаде Сильвестера (рис. 3.3, а).
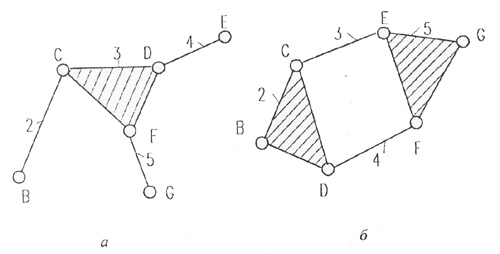 |
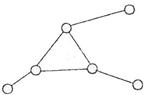
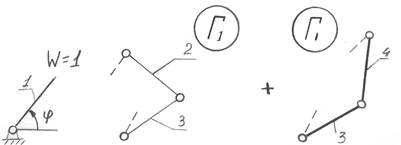
Второе сочетание чисел звеньев (n =4) и кинематических пар (
 ) позволяет реализовать две различные структурные группы. Эти группы приведены на рис. 3.4.
) позволяет реализовать две различные структурные группы. Эти группы приведены на рис. 3.4.
Рис. 3.4. Структурные группы, содержащие четыре подвижных звена
и шесть кинематических пар:
а - структурная группа с тремя внешними кинематическими пирами;
б - структурная группа с двумя внешними кинематическими парами.
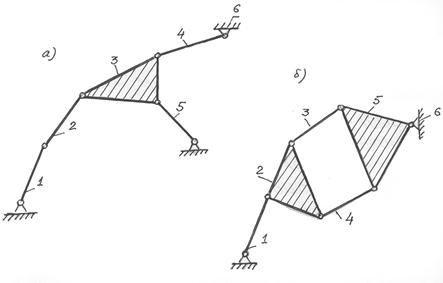 |
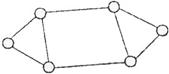
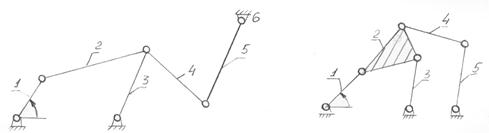
Присоединение структурных групп, изображенных на рис.3.4, а,б, к элементарным механизмам и стойке приводит к образованию следующих простых механизмов (рис.3.5).
Рис.3.5
Заметим, что в механизме (рис.3.5, а) в зависимости от выбора начального звена можно выделить две или одну структурные группы. Действительно, если в качестве начального звена выбрать звено 1, то структурная группа будет иметь вид, изображенный на рис. 3.4, а. Однако если за начальное звено взять, например, звено 5, то в механизме (рис.3.5) можно выделить две двухповодковые структурные группы (диады Сильвестера).
Классификация структурных групп.
Анализ показывает, что в машинах и механизмах имеется большое количество разнообразных структурных групп. Это усложняет их анализ и синтез. С целью упрощения изучения и анализа группы Ассура пытаются классифицировать.
В настоящее время нет единой классификации всех структурных групп. Наиболее полно проклассифицированы только группы Accура, существующие в трехмерном трёхподвижном пространстве, допускающем два независимых поступательных движения вдоль осей Х и Y и одно вращательное вокруг оси Z. Отметим, что в современном машиностроении именно механизмы, существующие в трехмерном трехподвижном пространстве, нашли самое широкое распространение на практике. Потому в данной лекции рассмотрим структурную классификацию структурных групп и так называемых плоских механизмов.
Напомним, что механизмы с высшими парами можно привести к механизмам с низшими кинематическими парами. В настоящее время признано, что лучшей классификацией механизмов с низшими кинематическими парами, которые существуют в трехмерном трехподвижном пространстве, является структурная классификация Ассура-Артоболевского [3]. Достоинством этой классификации является то, что с ее помощью не только упрощаются структурный анализ и синтез механизмов, но и она увязывается с методами кинематического, силового и динамического исследования механизмов.
Каждый рычажный механизм рассматривается как система, состоящая из элементарного первичного механизма, который в классификации Ассура-Артоболевского назван механизмом 1 класса, и соединенных с ним и между собой структурных групп.
Все механизмы и структурные группы, в них входящие, делятся на классы, а класс механизма в целом определяется высшим классом структурной группы, которая в него входит.
Элементарные механизмы условно отнесены к механизмам 1 класса.
Класс структурной группы определяется числом кинематических пар, входящих в замкнутый контур, образованный внутренними кинематическими парами.
При этом двухповодковая структурная группа (рис.3.3, а), не имеющая замкнутого контура, отнесена ко второму классу (см. табл. 3.1)
Порядок группы определяется числом внешних кинематических пар.
Так как на практике наибольшее применение нашла двухповодковая группа, то, в зависимости от места размещения на ней вращательных и поступательных кинематических пар, эта группа разделяется еще и по видам (рис.3.11).
| N п/п | Структурная схема | Класс группы | Порядок группы | Вид группы |
| II | I | ||
| III | - | ||
| IV | - |
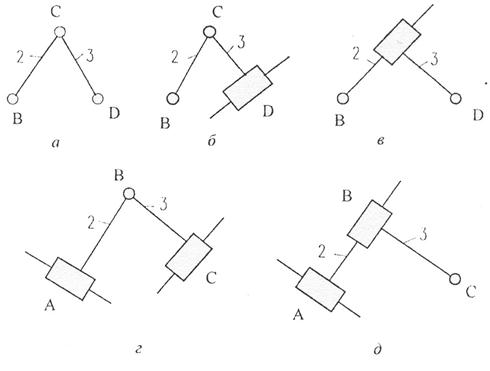 |
Рис. 3.11 Виды двухповодковых структурных групп:
а – диада 1 вида; б – диада 2 вида; в – диада 3 вида; г – диада 4 вида; д – диада 5 вида
К первому виду отнесена диада, у которой все кинематические пары - вращательные (рис. 3.11, а). Диада, у которой одна из внешних кинематических пар является поступательной, отнесена ко второму виду (рис. 3.11, 6). Диада, у которой внутренняя пара поступательная, относится к третьему виду (рис. 3.11, в). Двухповодковая группа, у которой две внешние кинематические пары поступательные, отнесена к четвертому виду (рис. 3.11, г). И, наконец, группа, у которой одна внешняя и внутренняя пары - поступательные, отнесена к пятому виду (рис. 3.11, д).
Казалось бы, что идя по пути последовательной замены в диаде Сильвестера вращательных кинематических пар поступательными, можно заменить все три вращательные пары на поступательные. Однако этого делать нельзя, так как в этом случае получим не структурную группу, а клиновой, который, конечно же, не является структурной группой и даже существует в другом по подвижности пространстве.
При проектировании механизмов без избыточных связей чаще всего применяется метод наслоения групп, предложенный Л.В. Ассуром. При этом механизм образуется из первичного механизма (обычно кривошип со стойкой) и присоединённых к нему групп нулевой подвижности. Что бы избежать избыточных связей, необходимо, что бы они отсутствовали как в первичном механизме так и в присоединяемых группах. При структурном синтезе механизма без избыточных связей с W=1 (в частном случае) необходимо соблюдать правила:
· Замкнутая кинематическая цепь механизма с W=1 и одним контуром без избыточных связей (q=0) должна иметь такой набор кинематических пар, что бы сумма их подвижностей была равна семи (7) для пространственного механизма и четырём (4) для плоского.
· Последующие присоединяемые группы звеньев, образующий после присоединения замкнутый контур, должны иметь в своём составе набор кинематических пар, сумма подвижностей которого равна 6 для пространственного механизма и 3 для плоского.
Давайте разберем несколько примеров структурного анализа.
1. Дано: 
2. Дано: 

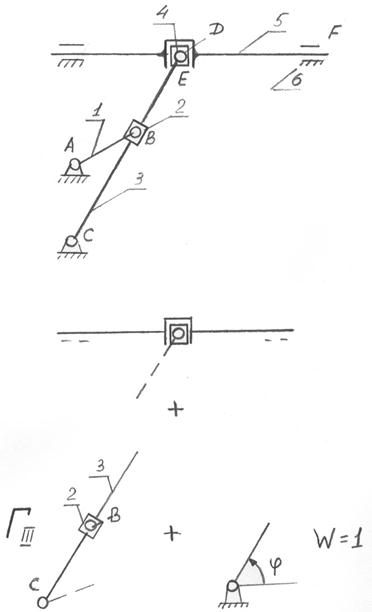
Структурный анализ – задача обратная синтезу. Структурный анализ заданного механизма следует производить путём расчленения его на структурные группы и первичные механизмы в порядке обратном образованию механизма.
От структурной схемы механизма при этом отделяют по одной все структурные группы таким образом, что бы оставшаяся цепь продолжала быть механизмом. После снятия всех групп должны остаться первичные механизмы, количество которых определяет число степеней свободы механизма
3. Дано: Поперечно-строгальный станок.

|
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 952; Нарушение авторских прав?; Мы поможем в написании вашей работы!