КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Некоторые особенности анализа кинематической природы связей
|
|
|
|
Классификация связей по кинематическому признаку
Структурный анализ
К а ч е с т в е н н ы й (с т р у к т у р н ы й) а н а л и з – это исследование структуры расчётной схемы сооружения, заключающееся в проверке правильности расположения связей, выявлении возможных дефектов соединения дисков и завершающееся определением кинематического качества (природы) системы (её геометрической неизменяемости, изменяемости или мгновенной изменяемости).
В ходе структурного анализа дается оценка кинематического качества каждой внешней и внутренней связи на основании упоминавшегося выше кинематического признака классификации связей. По этому признаку классифицируются только простые (линейные и угловые) связи, которые подразделяются на необходимые, лишние и ложные. Имеющиеся в системе сложные связи (шарниры, припайки) предварительно представляются как соответствующие комбинации простых связей.
Н е о б х о д и м ы е с в я з и – это связи, удаление которых вызывает изменение кинематической природы системы (геометрически неизменяемая система превращается в геометрически изменяемую или мгновенно изменяемую, мгновенно изменяемая система становится геометрически изменяемой).
Л и ш н и м и называются связи, при удалении которых кинематическая природа системы не изменяется, но эти связи ограничивают перемещения в деформируемой системе.
Л о ж н ы е с в я з и – такие, которые не оказывают никакого влияния ни на кинематическую природу системы, ни на перемещения в ней, определяемые с учётом деформации элементов.
Иными словами, при удалении ложной связи в системе ничего не изменяется – ни в случае учёта деформаций её элементов, ни в предположении об условной идеальной жёсткости материала.
Как видно из вышеприведённых определений, связи трёх разных видов различаются по последствиям удаления связи из системы. Поэтому кинематический признак связи формулируется с использованием характерного геометрического параметра – возможного перемещения  в системе с удалённой данной связью по её направлению, в предположении о недеформируемости дисков и связей (по гипотезе отвердения). Если исследуемая связь линейная, то – это проекция взаимного линейного перемещения точек А и В соединяемых связью дисков (см. рис. 1.12) на направление оси связи. В случае угловой связи перемещение – угол взаимного поворота узлов (сечений) в точках А и В (см. рис. 1.13).
в системе с удалённой данной связью по её направлению, в предположении о недеформируемости дисков и связей (по гипотезе отвердения). Если исследуемая связь линейная, то – это проекция взаимного линейного перемещения точек А и В соединяемых связью дисков (см. рис. 1.12) на направление оси связи. В случае угловой связи перемещение – угол взаимного поворота узлов (сечений) в точках А и В (см. рис. 1.13).
Очевидно, что в случае необходимой связи результатом её удаления должно быть возникновение степени свободы – перемещения по её направлению, следовательно,  0 – это и есть кинематический признак необходимой связи. При удалении лишней или ложной связи новая степень свободы не возникает, поэтому = 0 – это кинематический признак, общий для лишней и ложной связи. Чтобы различать их, используется дополнительный критерий, в котором оценивается также возможное перемещение, но в деформируемой системе с удалённой исследуемой связью, по её направлению –
0 – это и есть кинематический признак необходимой связи. При удалении лишней или ложной связи новая степень свободы не возникает, поэтому = 0 – это кинематический признак, общий для лишней и ложной связи. Чтобы различать их, используется дополнительный критерий, в котором оценивается также возможное перемещение, но в деформируемой системе с удалённой исследуемой связью, по её направлению –  . Как следует из определения лишней связи, для неё 0, а в случае ложной связи = 0.
. Как следует из определения лишней связи, для неё 0, а в случае ложной связи = 0.
Дадим оценку кинематической природы внешних линейных связей 1, 2 и 3 (рис. 1.36, а). Удалив связь 1, обнаружим, что возникает возможность перемещений в левой части системы, даже если считать диски и связи абсолютно жёсткими (см. рис. 1.36, б), при этом проекция линейного перемещения точки А (точка В неподвижна) на направление связи 1 получается отличной от нуля ( 0), следовательно, связь 1 – необходимая. После удаления связи 2 (при этом связь 1, уже исследованная ранее, остаётся на своем месте) получаем систему, изображённую на рис. 1.36, в. Полагая её стержни и связи недеформируемыми, обнаружим, что никаких перемещений в ней, в том числе и по направлению удалённой связи 2, возникнуть не может, т.е.
0), следовательно, связь 1 – необходимая. После удаления связи 2 (при этом связь 1, уже исследованная ранее, остаётся на своем месте) получаем систему, изображённую на рис. 1.36, в. Полагая её стержни и связи недеформируемыми, обнаружим, что никаких перемещений в ней, в том числе и по направлению удалённой связи 2, возникнуть не может, т.е.  = 0 – по этому признаку связь 2 либо лишняя, либо ложная.
= 0 – по этому признаку связь 2 либо лишняя, либо ложная.
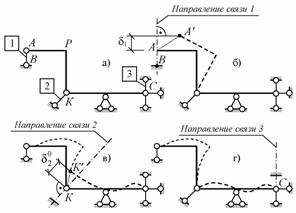
Рис.1.36
Для уточнения отказываемся от гипотезы отвердения и рассматриваем некоторое возможное (не противоречащее связям) произвольное деформированное состояние системы – на рис. 1.36, в оно изображено штриховой линией. По направлению связи 2 в узле К имеется перемещение  0 – значит, связь 2 – лишняя. Наконец, удалив связь 3, получаем систему, показанную на рис. 1.36, г, – в ней точка С не может перемещаться ни в случае отсутствия деформаций элементов, ни в деформированном состоянии, т.е.
0 – значит, связь 2 – лишняя. Наконец, удалив связь 3, получаем систему, показанную на рис. 1.36, г, – в ней точка С не может перемещаться ни в случае отсутствия деформаций элементов, ни в деформированном состоянии, т.е.  = 0 и
= 0 и  – признак того, что связь 3 – ложная.
– признак того, что связь 3 – ложная.
Лишние и ложные связи с количественной точки зрения являются избыточными, так как они не нужны для обеспечения геометрической неизменяемости системы – для этого достаточно только необходимых связей. Число избыточных связей определяется как n изб.св. = n c –  = – W.
= – W.
Несмотря на своё название, лишние связи, тем не менее, нужны для реализации определённых эксплуатационных качеств сооружения и появляются в расчётной схеме как результат принятия тех или иных инженерных решений при проектировании конструкций. Более того, в действительности систем без лишних связей не бывает – они возникают лишь в результате формирования расчётных моделей сооружений с идеализацией их реальных свойств (в частности, если пренебрегать трением в шарнирах, опорах и т.п.).
А вот ложные связи не нужны вообще, их можно рассматривать как «паразитные»; они должны быть выявлены и удалены из системы до начала её расчёта – в противном случае математическое решение задачи определения усилий и перемещений в сооружении окажется невозможным. В большинстве случаев специального исследования по критерию = 0 для обнаружения ложной связи не требуется, так как наглядным признаком её обычно является то, что она наложена на уже неподвижную точку (например, в системе на рис. 1.36 – связь 3 в точке С, которая и без этой связи уже неподвижна, будучи закреплена горизонтальной и нижней вертикальной жёсткими связями 1-го типа).
Поскольку «сортировка» избыточных связей – разделение их на лишние и ложные – производится путем учёта деформаций элементов системы (заметим, что это единственная процедура кинематического анализа, в которой не применяется гипотеза отвердения), то при разных исходных предпосылках о характере деформирования рассматриваемой системы возможны и разные оценки кинематического качества одной и той же избыточной связи – в одних случаях она может быть определена как лишняя, а в других – как ложная. Например, если систему, показанную на рис. 1.37, предполагается в дальнейшем рассчитывать с учётом всех видов деформаций стержневых элементов (изгиб, сдвиг, растяжение-сжатие), то горизонтальная связь в точке С – лишняя, так как её удаление не изменяет кинематическую природу системы, которая остаётся геометрически неизменяемой; но точка С получает возможность перемещаться горизонтально из-за продольных деформаций стержней АВ и ВС – следовательно, 0. Но если, как это часто делается в расчётах рамных систем, продольные деформации (укорочения-удлинения) стержней считать пренебрежимо малыми в сравнении с перемещениями, возникающими при искривлениях элементов от их изгиба, а сами «изгибные» перемещения – малыми, то при деформации горизонтального стержня АВС расстояние между точками А и С изменяться не будет, т.е. точка С останется неподвижной даже при удалённой горизонтальной связи – таким образом, = 0, и указанная связь оказывается ложной.
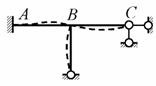
Рис.1.37
Если в реальном сооружении со схемой по рис. 1.38 допускается возникновение больших (соизмеримых с длинами элементов) перемещений, обусловленных изгибом, то и величину следует оценивать при больших перемещениях (рис. 1.38) – видно, что в этом случае 0, и горизонтальная связь в точке С – лишняя.
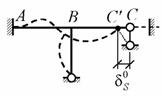
Рис.1.38
Приведённые примеры подтверждают обязательность корректного и строгого учёта исходных предпосылок и рабочих гипотез, определяющих особенности деформирования рассматриваемой системы, при выполнении её структурного анализа.
Выше уже указывалось, что по количественной оценке лишние и ложные связи входят в одну группу, являясь избыточными связями. Можно также заметить, что у необходимых и лишних связей есть общее свойство, заключающееся в том, что и те, и другие накладывают ограничения на перемещения системы (правда, в случае лишней связи – на перемещение, определяемое с учётом деформаций элементов). Следовательно, и необходимые, и лишние связи влияют на кинематические свойства системы и поэтому объединяются в категорию кинематических связей, в отличие от ложных связей, являющихся некинематическими.
В табл. 2 дано обобщение приведённых выше сведений о классификации связей по кинематическому признаку, а также сопутствующих терминов.
Таблица 2

В рассмотренном примере (см. рис. 1.36) связь 1 однозначно (безусловно) определена как необходимая. Относительно лишних и ложных связей такой однозначности нет. В частности, в узле С ложной связью может быть объявлена либо связь 3 (как это сделано в примере), либо нижняя вертикальная связь, если предположить, что она введена в узел С после его закрепления верхней вертикальной и горизонтальной линейными связями. Таким образом, существует альтернатива выявления ложной связи в узле С – для её разрешения должен быть обозначен определённый порядок наложения связей на узел, после чего делается заключение о том, какая именно из двух вертикальных связей рассматривается как ложная. Не столь очевидно решение вопроса о лишних связях. Если в той же системе (см. рис. 1.36) последовательно оценивать каждую из внешних связей (кроме необходимой), оставшихся после исключения ложной, то формально все они окажутся лишними, причём их число превысит найденное количественным анализом число избыточных связей n изб.св. = – W (здесь W – за вычетом удалённых ложных связей). Возникновение этого противоречия свидетельствует о некорректности процедуры поодиночного последовательного перебора всех связей, не являющихся необходимыми, на предмет определения лишних. Правильный подход состоит в том, что выявлять лишние связи нужно все одновременно, т.е. группой, исходя из того, что для системы с уже исключёнными ложными связями число лишних связей n лишн.св. = n изб.св. = – W. Рассматриваются разные возможные варианты групп, состоящих каждая из n лишн.св. предположительно лишних связей; причем к этому моменту необходимые связи должны быть обнаружены, чтобы не быть случайно включёнными в анализируемую группу.
Алгоритм действий таков:
1) одновременно удаляются все связи, включённые в исследуемую группу;
2) в системе с удалённой группой предположительно лишних
связей оцениваются возможные перемещения и по направлению каждой из связей группы;
3) при невыполнении критерия  хотя бы для одной связи рассмотренная группа отвергается как недопустимая; далее формируется новая группа, для которой выполняются процедуры 1 – 3;
хотя бы для одной связи рассмотренная группа отвергается как недопустимая; далее формируется новая группа, для которой выполняются процедуры 1 – 3;
4) в качестве контроля проверяются связи, оставшиеся в системе после удаления группы связей, признанных лишними по результатам процедур 1 – 3, – все оставшиеся связи должны оказаться необходимыми.
Например, после удаления в системе, представленной на рис. 1.36, а, ложной связи 3 (других ложных связей нет, если не пренебрегать продольными деформациями стержней; в противном случае ложной будет и горизонтальная связь в узле С) система принимает вид по схеме рис. 1.36, г. Выполняя её количественный анализ, имеем: D = 2, П = 0, H =1, С = 0, С о = 6, тогда W =  =
=  ; n лишн.св.= – W = 2.
; n лишн.св.= – W = 2.
Рассматривая группу из двух связей, образующих среднюю шарнирную неподвижную опору, после их удаления получаем систему, изображённую на рис. 1.39. Очевидно, что без учёта деформаций стержней получается = 0 и = 0, а в деформируемой системе  0 и 0 – значит, указанные две связи – лишние. Легко убедиться в том, что все остальные связи в системе (см. рис. 1.39) – необходимые.
0 и 0 – значит, указанные две связи – лишние. Легко убедиться в том, что все остальные связи в системе (см. рис. 1.39) – необходимые.
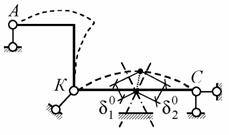
Рис.1.39
Возможны и другие варианты групп лишних связей, например, две опорные связи в точке С или связь в точке К и горизонтальная связь в точке С. Общее количество исследуемых вариантов групп предположительно лишних внешних связей в рассматриваемой системе определяется как число сочетаний из пяти внешних связей (необходимая связь в точке А не учитывается) по две:
 .
.
Среди них есть одна недопустимая – группа из связи в точке К и вертикальной связи в точке С (после их удаления получается  0 и
0 и  0 – рис. 1.40).
0 – рис. 1.40).
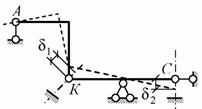
Рис.1.40
Если учитывать возможность отнесения к лишним связям наряду с внешними также и внутренних связей (например, трёх в припайке Р на рис. 1.36, а), то число вариантов групп становится значительно больше, возрастая до 28. Однако практической необходимости рассматривать все возможные варианты нет – достаточно проанализировать несколько наиболее характерных из них.
Более того, для большинства расчётных схем сооружений вообще можно не выполнять подробного исследования кинематической природы всех связей. Вместо этого структурный анализ сводится к воспроизведению последовательности операций по образованию (синтезу) системы из исходного набора несвязанных дисков наложением связей, предусмотренных расчетной схемой. При этом каждая операция заключается в соединении нескольких дисков (исходных или созданных путем укрупнения) с помощью определённой комбинации связей. Результатом очередного шага (операции) синтеза должно быть либо получение геометрически неизменяемой части системы (если это возможно обеспечить набором связей, имеющихся в расчётной схеме), либо выявление дефектов в расположении связей. В большинстве случаев разные ситуации в процессе синтеза системы могут быть сведены к применению типовых способов геометрически неизменяемого соединения элементов (дисков), изложенных в табл. 3 применительно к плоским системам.
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 815; Нарушение авторских прав?; Мы поможем в написании вашей работы!