КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Первый закон Ньютона. Масса. Сила
|
|
|
|
Динамика является основным разделом механики, в ее основе лежат три закона Ньютона, сформулированные им в 1687 г. Законы Ньютона играют исключительную роль в механике и являются (как и все физические законы) обобщением результатов огромного человеческого опыта. Их рассматривают как систему взаимосвязанных законов и опытной проверке подвергают не каждый отдельный закон, а всю систему в целом.
Первый закон Ньютона: всякая материальная точка (тело) сохраняет состояние покоя или равномерного прямолинейного движения до тех пор, пока воздействие со стороны других тел не заставит ее изменить это состояние.
Стремление тела сохранять состояние покоя или равномерного прямолинейного движения называется инертностью. Поэтому первый закон Ньютона называют также законом инерции.
Механическое движение относительно, и его характер зависит от системы отсчета. Первый закон Ньютона выполняется не во всякой системе отсчета, а те системы, по отношению к которым он выполняется, называются инерциальными системами отсчета. Инерциальной системой отсчета является такая система, которая либо покоится, либо движется равномерно и прямолинейно относительно какой-то другой инерциальной системы. Первый закон Ньютона утверждает существование инерциальных систем отсчета.
Опытным путем установлено, что инерциальной можно считать гелиоцентрическую (звездную) систему отсчета (начало координат находится в центре Солнца, а оси проведены в направлении определенных звезд). Система отсчета, связанная с Землей, строго говоря, неинерциальна, однако эффекты, обусловленные ее неинерциальностью (Земля вращается вокруг собственной оси и вокруг Солнца), при решении многих задач пренебрежимо малы, и в этих случаях ее можно считать инерциальной.
Из опыта известно, что при одинаковых воздействиях различные тела неодинаково изменяют скорость своего движения, т. е., иными словами, приобретают различные ускорения. Ускорение зависит не только от величины воздействия, но и от свойств самого тела (от его массы).
Масса тела — физическая величина, являющаяся одной из основных характеристик материи, определяющая ее инерционные (инертная масса) и гравитационные (гравитационная масса) свойства. В настоящее время можно считать доказанным, что инертная и гравитационная массы равны друг другу (с точностью, не меньшей 10-12 их значения).
Чтобы описывать воздействия, упоминаемые в первом законе Ньютона, вводят понятие силы. Под действием сил тела либо изменяют скорость движения, т. е. приобретают ускорения (динамическое проявление сил), либо деформируются, т. е. изменяют свою форму и размеры (статическое проявление сил). В каждый момент времени сила характеризуется числовым значением, направлением в пространстве и точкой приложения. Итак, сила — это векторная величина, являющаяся мерой механического воздействия на тело со стороны других тел или полей, в результате которого тело приобретает ускорение или изменяет свою форму и размеры.
Второй закон Ньютона
Второй закон Ньютона — основной закон динамики поступательного движения — отвечает на вопрос, как изменяется механическое движение материальной точки (тела) под действием приложенных к ней сил.
Если рассмотреть действие различных сил на одно и то же тело, то оказывается, что ускорение, приобретаемое телом, всегда прямо пропорционально равнодействующей приложенных сил:
a~F (m=const). (6.1)
При действии одной и той же силы на тела с разными массами их ускорения оказываются различными, а именно:
а~ 1 /т (F= const). (6.2)
Используя выражения (6.1) и (6.2) и учитывая, что сила и ускорение — величины векторные, можем записать
a = kF/m. (6.3)
Соотношение (6.3) выражает второй закон Ньютона: ускорение, приобретаемое материальной точкой (телом), пропорционально вызывающей его силе, совпадает с нею по направлению и обратно пропорционально массе материальной точки (тела).
В СИ коэффициент пропорциональности k = 1. Тогда
a = F /m,
или
F = m a = md v /dt (6.4)
Учитывая, что масса материальной точки (тела) в классической механике есть величина постоянная, в выражении (6.4) ее можно внести под знак производной:
F =(d/dt)(m v). (6.5)
Векторная величина
p = m v, (6.6)
численно равная произведению массы материальной точки на ее скорость и имеющая направление скорости, называется импульсом (количеством движения) этой материальной точки.
Подставляя (6.6) в (6.5), получим
F =d p /dt (6.7)
Это выражение — более общая формулировка второго закона Ньютона: скорость изменения импульса материальной точки равна действующей на нее силе. Выражение (6.7) называется уравнением движения материальной точки.
Единица силы в СИ — ньютон (Н): 1 Н — сила, которая массе в 1 кг сообщает ускорение 1 м/с2 в направлении действия силы:
1 Н=1 кг•м/с2.
Второй закон Ньютона справедлив только в инерциальных системах отсчета. Первый закон Ньютона можно получить из второго. Действительно, в случае равенства нулю равнодействующей сил (при отсутствии воздействия на тело со стороны других тел) ускорение (см. (6.3)) также равно нулю. Однако первый закон Ньютона рассматривается как самостоятельный закон (а не как следствие второго закона), так как именно он утверждает существование инерциальных систем отсчета, в которых только и выполняется уравнение (6.7).

о механике большое значение имеет принцип независимости действия сил: если на материальную точку действует одновременно несколько сил, то каждая из этих сил сообщает материальной точке ускорение согласно второму закону Ньютона, как будто других сил не было. Согласно этому принципу, силы и ускорения можно разлагать на составляющие, использование которых приводит к существенному упрощению решения задач. Например, на рис. 10 действующая сила F = m a разложена на два компонента: тангенциальную силу Ft (направлена по касательной к траектории) и нормальную силу F n (направлена по нормали к центру кривизны).
Используя выражения
аt=dv/dt и аn=v 2 /R, а также v=Rw, можно записать:
Если на материальную точку действует одновременно несколько сил, то, согласно принципу независимости действия сил, под F во втором законе Ньютона понимают результирующую силу
Третий закон Ньютона
Взаимодействие между материальными точками (телами) определяется третьим законом Ньютона: всякое действие материальных точек (тел) друг на друга носит характер взаимодействия; силы, с которыми действуют друг на друга материальные точки, всегда равны по модулю, противоположно направлены и действуют вдоль прямой, соединяющей эти точки:
F 12=- F 2I, (7.1)
где F 12 — сила, действующая на первую материальную точку со стороны второй; F 21 — сила, действующая на вторую материальную точку со стороны первой. Эти силы приложены к разным материальным точкам (телам), всегда действуют парами и являются силами одной природы.
При использовании законов динамики иногда допускают следующую ошибку: так как действующая сила всегда вызывает равную по модулю и противоположную по направлению силу противодействия, то, следовательно, их равнодействующая должна быть равна нулю и тела вообще не могут приобрести ускорения. Однако надо помнить, что во втором законе Ньютона речь идет об ускорении, приобретаемом телом под действием приложенных к нему сил. Равенство нулю ускорения означает равенство нулю равнодействующей сил, приложенных к одному и тому же телу. Третий же закон Ньютона говорит о равенстве сил, приложенных к различным телам. На каждое из двух взаимодействующих тел действует только одна сила, которая и сообщает данному телу ускорение.
Третий закон Ньютона позволяет осуществить переход от динамики отдельной материальной точки к динамике системы материальных точек. Это следует из того, что и для системы материальных точек взаимодействие сводится к силам парного взаимодействия между материальными точками.
Силы трения
Обсуждая до сих пор силы, мы не интересовались их происхождением. Однако в механике мы будем рассматривать различные силы: трения, упругости, тяготения.
Из опыта известно, что всякое тело, движущееся по горизонтальной поверхности другого тела, при отсутствии действия на него других сил с течением времени замедляет свое движение и в конце концов останавливается. Это можно объяснить существованием силы трения, которая
препятствует скольжению соприкасающихся тел друг относительно друга. Силы трения зависят от относительных скоростей тел. Силы трения могут быть разной природы, но в результате их действия механическая энергия всегда превращается во внутреннюю энергию соприкасающихся тел.
Различают внешнее (сухое) и внутреннее (жидкое или вязкое) трение. Внешним трением называется трение, возникающее в плоскости касания двух соприкасающихся тел при их относительном перемещении. Если соприкасающиеся тела неподвижны друг относительно друга, говорят о трении покоя, если же происходит относительное перемещение этих тел, то в зависимости от характера их относительного движения говорят о трении скольжения, качения или верчения.
Внутренним трением называется трение между частями одного и того же тела, например между различными слоями жидкости или газа, скорости которых меняются от слоя к слою. В отличие от внешнего трения здесь отсутствует трение покоя. Если тела скользят относительно друг друга и разделены прослойкой вязкой жидкости (смазки), то трение происходит в слое смазки. В таком случае говорят о гидродинамическом трении (слой смазки достаточно толстый) и граничном трении (толщина смазочной прослойки ~0,1 мкм и меньше).
Обсудим некоторые закономерности внешнего трения. Это трение обусловлено шероховатостью соприкасающихся поверхностей; в случае же очень гладких поверхностей трение обусловлено силами межмолекулярного притяжения.
Рассмотрим лежащее на плоскости тело (рис. 11), к которому приложена горизонтальная сила F.


Тело придет в движение лишь тогда, когда приложенная сила F будет больше силы трения F тр. Французские физики Г. Амонтон (1663—1705) и Щ. Кулон (1736—1806) опытным путем установили следующий закон: сила трения скольжения Fтр пропорциональна силе N нормального давления, с которой одно тело действует на другое:
Fтр =fN,
где f — коэффициент трения скольжения, зависящий от свойств соприкасающихся поверхностей.
Найдем значение коэффициента трения. Если тело находится на наклонной плоскости с углом наклона а (рис. 12), то оно приходит в движение только когда тангенциальная составляющая F силы тяжести Р больше силы трения F тр. Следовательно, в предельном случае (начало скольжения тела)
F=F тр
или

Таким образом, коэффициент трения равен тангенсу угла a0, при котором начинается скольжение тела по наклонной плоскости.
Для гладких поверхностей определенную роль начинает играть межмолекулярное притяжение. Поэтому Б. В. Дерягиным (р. 1902) предложен закон трения скольжения
F тр = f ист (N + SP0),
где p0 — добавочное давление, обусловленное силами межмолекулярного притяжения, которые быстро уменьшаются с увеличением расстояния между частицами; S — площадь контакта между телами; fист — истинный коэффициент трения скольжения.
Трение играет большую роль в природе и технике. Благодаря трению движется транспорт, удерживается забитый в стену гвоздь и т. д.
В некоторых случаях силы трения оказывают вредное действие, и поэтому их надо уменьшать. Для этого на трущиеся поверхности наносят смазку (сила трения уменьшается примерно в 10 раз), которая заполняет неровности между этими поверхностями и располагается тонким слоем между ними так, что поверхности как бы перестают касаться друг друга, а скользят друг относительно друга отдельные слои жидкости. Таким образом, внешнее трение твердых тел заменяется значительно меньшим внутренним трением жидкости.
Радикальным способом уменьшения силы трения является замена трения скольжения трением качения (шариковые и роликовые подшипники и т.д.). Сила трения качения определяется по закону Кулона:
F тр = f kN/r, (8.1)
где r — радиус катящегося тела; fk — коэффициент трения качения, имеющий размерность dimfk=L. Из (8.1) следует, что сила трения качения обратно пропорциональна радиусу катящегося тела.
Закон сохранения импульса. Центр масс
Для вывода закона сохранения импульса рассмотрим некоторые понятия. Совокупность материальных точек (тел), рассматриваемых как единое целое, называется механической системой. Силы взаимодействия между материальными точками механической системы называются внутренними. Силы, с которыми на материальные точки системы действуют внешние тела, называются внешними. Механическая система тел, на которую не действуют
внешние силы, называется замкнутой (или изолированной). Если мы имеем механическую систему, состоящую из многих тел, то, согласно третьему закону Ньютона, силы, действующие между этими телами, будут равны и противоположно направлены, т. е. геометрическая сумма внутренних сил равна нулю.
Рассмотрим механическую систему, состоящую из n тел, масса и скорость которых соответственно равны т 1, m 2,..., тn и v 1, v 2,..., v n. Пусть F '1, F '2,..., F 'n — равнодействующие внутренних сил, действующих на каждое из этих тел, a f 1, f 2,..., F n — равнодействующие внешних сил. Запишем второй закон Ньютона для каждого из n тел механической системы:
d/dt(m1v1)= F '1+ F 1,
d/dt(m2v2)= F' 2+ F 2,
d/dt)mn v n)= F 'n+ F n.
Складывая почленно эти уравнения, получим
d/dt (m1 v 1+m2 v 2+... + mn v n) = F '1+ F '2+...+ F ' n + F 1+ F 2+...+ F n.
Но так как геометрическая сумма внутренних сил механической системы по третьему закону Ньютона равна нулю, то
d/dt(m1v1+m2v2 +... + mnvn)= F 1 + F 2+...+ F n, или
dp/dt= F 1+ F 2+...+ F n, (9.1)
где 
импульс системы. Таким образом, производная по времени от импульса механической системы равна геометрической сумме внешних сил, действующих на систему.
В случае отсутствия внешних сил (рассматриваем замкнутую систему)

Это выражение и является законом сохранения импульса: импульс замкнутой системы сохраняется, т. е. не изменяется с течением времени.
Закон сохранения импульса справедлив не только в классической физике, хотя он и получен как следствие законов Ньютона. Эксперименты доказывают, что он выполняется и для замкнутых систем микрочастиц (они подчиняются законам квантовой механики). Этот закон носит универсальный характер, т. е. закон сохранения импульса — фундаментальный закон природы.
Закон сохранения импульса является следствием определенного свойства симметрии пространства — его однородности. Однородность пространства заключается в том, что при параллельном переносе в пространстве замкнутой системы тел как целого ее физические свойства и законы движения не изменяются, иными словами, не зависят от выбора положения начала координат инерциальной системы отсчета.
Отметим, что согласно (9.1), импульс сохраняется и для незамкнутой системы, если геометрическая сумма всех внешних сил равна нулю.
В механике Галилея — Ньютона из-за независимости массы от скорости импульс системы может быть выражен через скорость ее центра масс. Центром масс (или центром инерции) системы материальных точек называется воображаемая точка С, положение которой характеризует распределение массы этой системы. Ее радиус-вектор равен

где mi и ri — соответственно масса и радиус-вектор i-й материальной точки; n — число материальных точек в системе;

— масса системы.
Скорость центра масс

Учитывая, что p i =mi v i, а

есть импульс р системы, можно написать
p = m v c, (9.2)
т. е. импульс системы равен произведению массы системы на скорость ее центра масс.
Подставив выражение (9.2) в уравнение (9.1), получим
mdvc/dt= F 1+ F 2+...+ F n, (9.3)
т. е. центр масс системы движется как материальная точка, в которой сосредоточена масса всей системы и на которую действует сила, равная геометрической сумме всех внешних сил, действующих на систему. Выражение (9.3) представляет собой закон движения центра масс.
В соответствии с (9.2) из закона сохранения импульса вытекает, что центр масс замкнутой системы либо движется прямолинейно и равномерно, либо остается неподвижным.
Уравнение движения тела переменной массы
Движение некоторых тел сопровождается изменением их массы, например масса ракеты уменьшается за счет истечения газов, образующихся при сгорании топлива, и т. п.
Выведем уравнение движения тела переменной массы на примере движения ракеты. Если в момент времени t масса ракеты т, а ее скорость v, то по истечении времени dt ее масса уменьшится на dm
и станет равной т- dm, а скорость станет равной v +d v. Изменение импульса системы за отрезок времени dt
dp = [(m-dm) (v +d v)+dm (v + u)]- m v,
где и — скорость истечения газов относительно ракеты. Тогда
d p = md v + u dm
(учли, что dm dv — малый высшего порядка малости по сравнению с остальными).
Если на систему действуют внешние силы, то d p = F dt, поэтому
F dt = md v + u dm,
md v /dt= F - u dm/dt. (10.1)
Член - u dm/dt называют реактивной силой
at
F p. Если u противоположен v, то ракета ускоряется, а если совпадает с v, то тормозится.
Таким образом, мы получили уравнение движения тела переменной массы
m a = F + F p, (10.2)
которое впервые было выведено И. В.Мещерским (1859—1935).
Идея применения реактивной силы для создания летательных аппаратов высказывалась в 1881 г. Н. И. Кибальчичем (1854—1881). К.Э.Циолковский (1857— 1935) в 1903 г. опубликовал статью, где
предложил теорию движения ракеты и основы теории жидкостного реактивного двигателя. Поэтому его считают основателем отечественной космонавтики.
Применим уравнение (10.1) к движению ракеты, на которую не действуют никакие внешние силы. Полагая F = 0 и считая, что скорость выбрасываемых газов относительно ракеты постоянна (ракета движется прямолинейно), получим
dv dm т dv/dt=-udm/dt. откуда

Значение постоянной интегрирования С определим из начальных условий. Если в начальный момент времени скорость ракеты равна нулю, а ее стартовая масса то, то С = uln m0. Следовательно,
v = uln(m0/m). (10.3)
Это соотношение называется формулой Циолковского. Она показывает, что: 1) чем больше конечная масса ракеты т, тем больше должна быть стартовая масса ракеты то; 2) чем больше скорость истечения и газов, тем больше может быть конечная масса при данной стартовой массе ракеты.
Выражения (10.2) и (10.3) получены для нерелятивистских движений, т. е. для случаев, когда скорости v и u малы по сравнению со скоростью света с.
Работа и энергия
§11. Энергия, работа, мощность
Энергия — универсальная мера различных форм движения и взаимодействия. С различными формами движения материи связывают различные формы энергии: механическую, тепловую, электромагнитную, ядерную и др. В одних явлениях форма движения материи не изменяется (например, горячее тело нагревает холодное), в других — переходит в иную форму (например, в результате трения механическое движение превращается в тепловое). Однако существенно, что во всех случаях энергия, отданная (в той или иной форме) одним телом другому телу, равна энергии, полученной последним телом.
Изменение механического движения тела вызывается силами, действующими на него со стороны других тел. Чтобы
количественно характеризовать процесс обмена энергией между взаимодействующими телами, в механике вводится понятие работы силы.
Если тело движется прямолинейно и на него действует постоянная сила F, которая составляет некоторый угол а с направлением перемещения, то работа этой силы равна произведению проекции силы Fs на направление перемещения (Fs = Fcosa), умноженной на перемещение точки приложения силы:
A = Fss = Fs cosa. (11.1)
В общем случае сила может изменяться как по модулю, так и по направлению, поэтому формулой (11.1) пользоваться нельзя. Если, однако, рассмотреть элементарное перемещение dr, то силу F можно считать постоянной, а движение точки ее

приложения — прямолинейным. Элементарной работой силы F на перемещении d r называется скалярная величина
dА = F d r = Fcos a• ds=Fsds,
где а — угол между векторами F и d r; ds = |d r | — элементарный путь; Fs — проекция вектора F на вектор d r (рис. 13).
Работа силы на участке траектории от точки 1 до точки 2 равна алгебраической сумме элементарных работ на отдельных бесконечно малых участках пути. Эта сумма приводится к интегралу

Для вычисления этого интеграла надо знать зависимость силы Fs от пути s вдоль траектории 1 — 2. Пусть эта зависимость представлена графически (рис. 14), тогда искомая работа А определяется на графике площадью закрашенной фигуры. Если, например, тело движется прямолинейно, сила F=const и a=const, то получим

где s — пройденный телом путь (см. также формулу (11.1)).
Из формулы (11.1) следует, что при a<p/2 работа силы положительна, в этом случае составляющая F s совпадает

по направлению с вектором скорости движения v (см. рис. 13). Если a>p/2, то работа силы отрицательна. При a = p/2 (сила направлена перпендикулярно перемещению) работа силы равна нулю.
Единица работы — джоуль (Дж): 1 Дж — работа, совершаемая силой в 1 Н на пути в 1 м (1 Дж = 1 Н•м).
Чтобы охарактеризовать скорость совершения работы, вводят понятие мощности:
N=da/dt. (11.3)
За время dt сила F совершает работу F d r, и мощность, развиваемая этой силой, в данный момент времени
N= F d r /dt= Fv
т. е. равна скалярному произведению вектора силы на вектор скорости, с которой движется точка приложения этой силы; N — величина скалярная.
Единица мощности — ватт (Вт): 1 Вт — мощность, при которой за время 1 с совершается работа в 1 Дж (1 Вт = 1 Дж/с).
Кинетическая и потенциальная энергии
Кинетическая энергия механической системы — это энергия механического движения этой системы.
Сила F, действуя на покоящееся тело и вызывая его движение, совершает работу, а энергия движущегося тела возрастает на величину затраченной работы. Таким образом, работа dA силы F на пути, который тело прошло за время возрастания скорости от 0 до v, идет на увеличение кинетической энергии dT тела, т. е.
dA= dT.
Используя второй закон Ньютона F =md v /dt
и умножая обе части равенства на перемещение d r, получим
F d r =m(d v /dt)dr=dA

Таким образом, тело массой т, движущееся со скоростью v, обладает кинетической энергией
Т = тv2/2. (12.1)
Из формулы (12.1) видно, что кинетическая энергия зависит только от массы и скорости тела, т. е. кинетическая энергия системы есть функция состояния ее движения.
При выводе формулы (12.1) предполагалось, что движение рассматривается в инерциальной системе отсчета, так как иначе нельзя было бы использовать законы Ньютона. В разных инерциальных системах отсчета, движущихся друг относительно друга, скорость тела, а следовательно, и его кинетическая энергия будут неодинаковы. Таким образом, кинетическая энергия зависит от выбора системы отсчета.
Потенциальная энергия — механическая энергия системы тел, определяемая их взаимным расположением и характером сил взаимодействия между ними.
Пусть взаимодействие тел осуществляется посредством силовых полей (например, поля упругих сил, поля гравитационных сил), характеризующихся тем, что работа, совершаемая действующими силами при перемещении тела из одного положения в другое, не зависит от того, по какой траектории это перемещение произошло, а зависит только от начального и конечного положений. Такие поля называются потенциальными, а силы, действующие в них,— консервативными. Если же работа, совершаемая силой, зависит от траектории перемещения тела из одной точки в другую, то такая сила называется диссипативной; ее примером является сила трения.
Тело, находясь в потенциальном поле сил, обладает потенциальной энергией II. Работа консервативных сил при элементарном (бесконечно малом) изменении конфигурации системы равна приращению потенциальной энергии, взятому со знаком минус, так как работа совершается за счет убыли потенциальной энергии:
dA=-dП. (12.2)
Работа d А выражается как скалярное произведение силы F на перемещение d r и выражение (12.2) можно записать в виде
F d r =-dП. (12.3)
Следовательно, если известна функция П(r), то из формулы (12.3) можно найти силу F по модулю и направлению.
Потенциальная энергия может быть определена исходя из (12.3) как

где С — постоянная интегрирования, т. е. потенциальная энергия определяется с точностью до некоторой произвольной постоянной. Это, однако, не отражается на физических законах, так как в них входит или разность потенциальных энергий в двух положениях тела, или производная П по координатам. Поэтому потенциальную энергию тела в каком-то определенном положении считают равной нулю (выбирают нулевой уровень отсчета), а энергию тела в других положениях отсчитывают относительно нулевого уровня. Для консервативных сил

или в векторном виде
F =-gradП, (12.4) где

(i, j, k — единичные векторы координатных осей). Вектор, определяемый выражением (12.5), называется градиентом скаляра П.
Для него наряду с обозначением grad П применяется также обозначение ÑП. Ñ («набла») означает символический вектор, называемый оператором Гамильтона или набла-оператором:

Конкретный вид функции П зависит от характера силового поля. Например, потенциальная энергия тела массой т, поднятого на высоту h над поверхностью Земли, равна
П = mgh, (12.7)
где высота h отсчитывается от нулевого уровня, для которого П0 = 0. Выражение (12.7) вытекает непосредственно из того, что потенциальная энергия равна работе силы тяжести при падении тела с высоты h на поверхность Земли.
Так как начало отсчета выбирается произвольно, то потенциальная энергия может иметь отрицательное значение (кинетическая энергия всегда положительна!}. Если принять за нуль потенциальную энергию тела, лежащего на поверхности Земли, то потенциальная энергия тела, находящегося на дне шахты (глубина h'), П =-mgh'.
Найдем потенциальную энергию упругодеформированного тела (пружины). Сила упругости пропорциональна деформации:
Fх упр= -kx,
где Fxупр — проекция силы упругости на ось х; k — коэффициент упругости (для пружины — жесткость), а знак минус указывает, что Fx упр направлена в сторону, противоположную деформации х.
По третьему закону Ньютона, деформирующая сила равна по модулю силе упругости и противоположно ей направлена, т. е.
Fx=-Fx упр=kx Элементарная работа dA, совершаемая силой Fx при бесконечно малой деформации dx, равна
dA = Fx dx = kxdx,
а полная работа

идет на увеличение потенциальной энергии пружины. Таким образом, потенциальная энергия упругодеформированного тела
П =kx2/2.
Потенциальная энергия системы, подобно кинетической энергии, является функцией состояния системы. Она зависит только от конфигурации системы и ее положения по отношению к внешним телам.
Полная механическая энергия системы — энергия механического движения и взаимодействия:
Е = Е+П,
т. е. равна сумме кинетической и потенциальной энергий.
Закон сохранения энергии
Закон сохранения энергии — результат обобщения многих экспериментальных данных. Идея этого закона принадлежит М. В. Ломоносову (1711 —1765), изложившему закон сохранения материи и движения, а количественная формулировка закона сохранения энергии дана немецким врачом Ю. Майером (1814—1878) и немецким естествоиспытателем Г. Гельмгольцем (1821 — 1894).
Рассмотрим систему материальных точек массами m1, m 2 ,..., mn, движущихся со скоростями v 1, v 2,..., v n. Пусть F '1, F '2,..., F ' n — равнодействующие внутренних консервативных сил, действующих на каждую из этих точек, a f 1, F 2,..., F n— равнодействующие внешних сил, которые также будем считать консервативными. Кроме того, будем считать, что на материальные точки действуют еще и внешние неконсервативные силы; равнодействующие этих сил, действующих на каждую из материальных точек, обозначим f 1, f 2,..., fn. При v<<с массы материальных точек
постоянны и уравнения второго закона Ньютона для этих точек следующие:

Двигаясь под действием сил, точки системы за интервал времени dt совершают перемещения, соответственно равные d r 1, d r 2,..., d r n. Умножим каждое из уравнений скалярно на соответствующее перемещение и, учитывая, что dri = vidt, получим:

Сложив эти уравнения, получим

Первый член левой части равенства (13.1)
где dT есть приращение кинетической энергии системы. Второй член

равен элементарной работе внутренних и внешних консервативных сил, взятой со знаком минус, т. е. равен элементарному приращению потенциальной энергии dП системы (см. (12.2)).
Правая часть равенства (13.1) задает работу внешних неконсервативных сил,
действующих на систему. Таким образом, имеем
d(T+ П )=dA. (13.2)
При переходе системы из состояния 1 в какое-либо состояние 2

т. е. изменение полной механической энергии системы при переходе из одного состояния в другое равно работе, совершенной при этом внешними неконсервативными силами. Если внешние неконсервативные силы отсутствуют, то из (13.2) следует, что
d(Т+П) = 0,
откуда
Т+П = E=const, (13.3)
т. е. полная механическая энергия системы сохраняется постоянной. Выражение (13.3) представляет собой закон сохранения механической энергии: в системе тел, между которыми действуют только консервативные силы, полная механическая энергия сохраняется, т. е. не изменяется со временем.
Механические системы, на тела которых действуют только консервативные силы (внутренние и внешние), называются консервативными системами. Закон сохранения механической энергии можно сформулировать так: в консервативных системах полная механическая энергия сохраняется.
Закон сохранения механической энергии связан с однородностью времени, т. е. инвариантностью физических законов относительно выбора начала отсчета времени. Например, при свободном падении тела в поле сил тяжести его скорость и пройденный путь зависят лишь от начальной скорости и продолжительности свободного падения тела и не зависят от того, когда тело начало падать.
Существует еще один вид систем — диссипативные системы, в которых механическая энергия постепенно уменьшается за счет преобразования в другие (немеха-нические) формы энергии. Этот процесс получил название диссипации (или рассеяния) энергии. Строго говоря, все системы в природе являются диссипативными.
В консервативных системах полная механическая энергия остается постоянной. Могут происходить лишь превращения кинетической энергии в потенциальную и обратно в эквивалентных количествах, так что полная энергия остается неизменной. Поэтому, как указывает Ф. Энгельс, этот закон не есть просто закон количественного сохранения энергии, а закон сохранения и превращения энергии, выражающий и качественную сторону взаимного превращения различных форм движения друг в друга. Закон сохранения и превращения энергии — фундаментальный закон природы, он справедлив как для систем макроскопических тел, так и для систем микротел.
В системе, в которой действуют также неконсервативные силы, например силы трения, полная механическая энергия системы не сохраняется. Следовательно, в этих случаях закон сохранения механической энергии несправедлив. Однако при «исчезновении» механической энергии всегда возникает эквивалентное количество энергии другого вида. Таким образом, энергия никогда не исчезает и не появляется вновь, она лишь превращается из одного вида в другой. В этом и заключается физическая сущность закона сохранения и превращения энергии — сущность неуничтожимости материи и ее движения.
Удар абсолютно упругих и неупругих тел
Примером применения законов сохранения импульса и энергии при решении реальной физической задачи является удар абсолютно упругих и неупругих тел.
Удар (или соударение) — это столкновение двух или более тел, при котором взаимодействие длится очень короткое время. Исходя из данного определения, кроме явлений, которые можно отнести к ударам в прямом смысле этого слова(столкновения атомов или биллиардных шаров), сюда можно отнести и такие, как удар человека о землю при прыжке с трамвая и т. д. При ударе в телах возникают столь значительные внутренние силы, что внешними силами, действующими на них, можно пренебречь. Это позволяет рассматривать соударяющиеся тела как замкнутую систему и применять к ней законы сохранения.
Тела во время удара претерпевают деформацию. Сущность удара заключается в том, что кинетическая энергия относительного движения соударяющихся тел на короткое время преобразуется в энергию упругой деформации. Во время удара имеет место перераспределение энергии между соударяющимися телами. Наблюдения показывают, что относительная скорость тел после удара не достигает своего прежнего значения. Это объясняется тем, что нет идеально упругих тел и идеально гладких поверхностей. Отношение нормальных составляющих относительной скорости тел после и до удара называется коэффициентом восстановления e:
e = v'n/vn.
Если для сталкивающихся тел e=0, то такие тела называются абсолютно неупругими, если e=1 —абсолютно упругими.
На практике для всех тел 0<e<1 (например, для стальных шаров e»0,56, для шаров из слоновой кости e»0,89, для свинца e»0). Однако в некоторых случаях тела можно с большой точностью рассматривать либо как абсолютно упругие, либо как абсолютно неупругие.
Прямая, проходящая через точку соприкосновения тел и нормальная к поверхности их соприкосновения, называется линией удара. Удар называется центральным, если тела до удара движутся вдоль прямой, проходящей через их центры масс. Мы будем рассматривать только центральные абсолютно упругие и абсолютно неупругие удары.
Абсолютно упругий удар — столкновение двух тел, в результате которого в обоих взаимодействующих телах не остается никаких деформаций и вся кинетическая энергия, которой обладали тела до удара, после удара снова превращается в кинетическую энергию

.
Для абсолютно упругого удара выполняются закон сохранения импульса и закон сохранения кинетической энергии.
Обозначим скорости шаров массами m 1 и m 2 до удара через v1 и v2, после удара — через v'1 и v'2 (рис. 18). При прямом центральном ударе векторы скоростей шаров до и после удара лежат на прямой линии, соединяющей их центры. Проекции векторов скорости на эту линию равны модулям скоростей. Их направления учтем знаками: положительное значение припишем движению вправо, отрицательное — движению влево.
При указанных допущениях законы сохранения имеют вид

Произведя соответствующие преобразования в выражениях (15.1) и (15.2), получим

Решая уравнения (15.3) и (15.5), находим

Разберем несколько примеров.

Проанализируем выражения (15.8) и (15.9) для двух шаров различных масс:
а) m 1 =m 2. Если второй шар до удара висел неподвижно (v 2=0) (рис. 19), то после удара остановится первый шар (v'1=0), а второй будет двигаться с той же скоростью и в том же направлении, в котором двигался первый шар до удара (v' 2 = v 1 );
б) m 1> m 2.

Первый шар продолжает двигаться в том же направлении, как и до удара, но с меньшей скоростью (v' 1 <v 1 ). Скорость второго шара после удара больше, чем скорость первого после удара (v'2>v'1) (рис.20);

в) m 1< m2. Направление движения первого шара при ударе изменяется — шар отскакивает обратно. Второй шар движется в ту же сторону, в которую двигался первый шар до удара, но с меньшей скоростью, т.е. v' 2 <v 1 (рис. 21);
г) m 2>> m 1 (например, столкновение шара со стеной). Из уравнений (15.8) и (15.9) следует, что v' 1 =-v 1, v' 2 »2 m1v1/m2 » 0.

2) При m 1= m 2 выражения (15.6) и (15.7) будут иметь вид
v' 1 =v 2, v' 2 =v 1,
т. е. шары равной массы «обмениваются» скоростями.
Абсолютно неупругий удар — столкновение двух тел, в результате которого тела объединяются, двигаясь дальше как единое целое.

Продемонстрировать абсолютно неупругий удар можно с помощью шаров из пластилина (глины), движущихся навстречу друг другу (рис. 22).
Если массы шаров m1 и m2, их скорости до удара v1 и v2, то, используя закон сохранения импульса, можно записать

Если шары движутся навстречу друг другу, то они вместе будут продолжать двигаться в ту сторону, в которую двигался шар, обладающий большим импульсом. В частном случае если массы шаров равны (m 1 =m 2 ), то
v = (v1+v2)/2.
Выясним, как изменяется кинетическая энергия шаров при центральном абсолютно неупругом ударе. Так как в процессе соударения шаров между ними дей-ствуют силы, зависящие не от самих деформаций, а от их скоростей, то мы имеем дело с силами, подобными силам трения, поэтому закон сохранения механической энергии не должен соблюдаться. Вследствие деформации происходит «потеря» кинетической энергии, перешедшей в тепловую или другие формы энергии. Эту «потерю» можно определить по разности кинетической энергии тел до и после удара:

Если ударяемое тело было первоначально неподвижно (v 2 = 0), то

Когда m 2 >>m 1 (масса неподвижного тела очень большая), то v<<v 1 и почти вся кинетическая энергия тела при ударе переходит в другие формы энергии. Поэтому, например, для получения значительной деформации наковальня должна быть массивнее молотка. Наоборот, при забивании гвоздей в стену масса молотка должна быть гораздо большей (m 1 >>m 2 ), тогда v»v 1 и практически вся энергия затрачивается на возможно большее перемещение гвоздя, а не на остаточную деформацию стены.
Абсолютно неупругий удар — пример того, как происходит «потеря» механической энергии под действием диссипативных сил.
Механика твердого тела
§ 16. Момент инерции
При изучении вращения твердого тела пользуются понятием момента инерции. Моментом инерции системы (тела) относительно оси вращения называется физическая величина, равная сумме произведений масс n материальных точек системы на квадраты их расстояний до рассматриваемой оси:

В случае непрерывного распределения масс эта сумма сводится к интегралу

где интегрирование производится по всему объему тела. Величина r в этом случае есть функция положения точки с координатами х, у, z.
В качестве примера найдем момент инерции однородного сплошного цилиндра высотой Л и радиусом R относительно его геометрической оси (рис.23). Разобьем
 цилиндр на отдельные полые концентрические цилиндры бесконечно малой толщины dr с внутренним радиусом r и внешним — r+dr. Момент инерции каждого полого цилиндра dJ = r2dm (так как dr<<r, то считаем, что расстояние всех точек цилиндра от оси равно r), где dm — масса всего элементарного цилиндра; его объем 2prhdr. Если r — плотность материала, то dm= r• 2prhdr и dJ = 2prr3dr. Тогда момент инерции сплошного цилиндра
цилиндр на отдельные полые концентрические цилиндры бесконечно малой толщины dr с внутренним радиусом r и внешним — r+dr. Момент инерции каждого полого цилиндра dJ = r2dm (так как dr<<r, то считаем, что расстояние всех точек цилиндра от оси равно r), где dm — масса всего элементарного цилиндра; его объем 2prhdr. Если r — плотность материала, то dm= r• 2prhdr и dJ = 2prr3dr. Тогда момент инерции сплошного цилиндра

но так как p R'2h — объем цилиндра, то его масса m = pR2hr, а момент инерции
J = 1/2R2.
Если известен момент инерции тела относительно оси, проходящей через его центр масс, то момент инерции относительно любой другой параллельной оси определяется теоремой Штейнера: момент инерции тела J относительно любой оси вращения равен моменту его инерции Jc относительно параллельной оси, проходящей через центр масс С тела, сложенному с произведением массы m тела на квадрат расстояния а между осями: J = Jc + ma2. (16.1)
Таблица 1
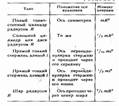
В заключение приведем значения моментов инерции (табл. 1) для некоторых тел (тела считаются однородными, т — масса тела).
Кинетическая энергия вращения
Рассмотрим абсолютно твердое тело (см. § 1), вращающееся около неподвижной оси z, проходящей через него (рис. 24). Мысленно разобьем это тело на маленькие объемы с элементарными массами m 1, m 2 ,..., mn, находящиеся на расстоянии r 1, r 2,..., rn от оси вращения. При вращении твердого тела относительно неподвижной оси отдельные его элементарные объемы массами mi, опишут окружности различных радиусов ri и имеют различные линейные скорости vi. Но так как мы рассматриваем абсолютно твердое тело, то угловая скорость вращения этих объемов одинакова:
w = v 1 /r 1 = v 2 /r 2 =... = vn/rn. (17.1)
Кинетическую энергию вращающегося тела найдем как сумму кинетических энергий его элементарных объемов:


или

Используя выражение (17.1), получим

где Jz — момент инерции тела относительно оси 2. Таким образом, кинетическая энергия вращающегося тела
Tвр = Jzw2/2. (17.2)
Из сравнения формулы (17.2) с выражением (12.1) для кинетической энергии тела, движущегося поступательно (T= mv2/2), следует, что момент инерции вращательного движения — мера инертности тела. Формула (17.2) справедлива для тела, вращающегося вокруг неподвижной оси.
В случае плоского движения тела, например цилиндра, скатывающегося с наклонной плоскости без скольжения, энергия движения складывается из энергии поступательного движения и энергии вращения:

где m — масса катящегося тела; vc — скорость центра масс тела; J с — момент инерции тела относительно оси, проходящей через его центр масс; w — угловая скорость тела.
Момент силы. Уравнение динамики вращательного движения твердого тела
Моментом силы F относительно неподвижной точки О называется физическая величина, определяемая векторным произведением радиуса-вектора г, проведенного из точки О в точку А приложения силы, на силу F (рис. 25):
M = [ rF ].

Здесь М — псевдовектор, его направление совпадает с направлением поступательного движения правого винта при его вращении от г к F.
Модуль момента силы
M = Frsina= Fl, (18.1)
где a — угол между г и F; rsina = l — кратчайшее расстояние между линией действия силы и точкой О — плечо силы.
Моментом силы относительно неподвижной оси z называется скалярная величина Мz, равная проекции на эту ось вектор а М момента силы, определенного относительно произвольной точки О данной оси 2 (рис.26). Значение момента Мz не зависит от выбора положения точки О на оси z.
Если ось z совпадает с направлением вектора М, то момент силы представля-


ется в виде вектора, совпадающего с осью:
М z = [ rF ]z.
Найдем выражение для работы при вращении тела (рис.27). Пусть сила F приложена в точке В, находящейся от оси вращения на расстоянии r, a — угол между направлением силы и радиусом-вектором r. Так как тело абсолютно твердое, то работа этой силы равна работе, затраченной на поворот всего тела. При повороте тела на бесконечно малый угол dj точка приложения В проходит путь ds= rdj, и работа равна произведению проекции силы на направление смещения на величину смещения:
dA=F sinardj. (18.2) Учитывая (18.1), можем записать dA=Mzdj,
где Fr sina = Fl =Mz — момент силы относительно оси z. Таким образом, работа при вращении тела равна произведению момента действующей силы на угол поворота.
Работа при вращении тела идет на увеличение его кинетической энергии:
dA = dT, но

Учитывая, что w=dj/dt, получим

Уравнение (18.3) представляет собой уравнение динамики вращательного движения твердого тела относительно неподвижной оси.
Можно показать, что если ось вращения совпадает с главной осью инерции (см. §20), проходящей через центр масс, то имеет место векторное равенство

где J — главный момент инерции тела (момент инерции относительно главной оси).
Момент импульса и закон его сохранения
При сравнении законов вращательного и поступательного движений просматривается аналогия между ними, только во вращательном движении вместо силы «выступает» ее момент, роль массы играет момент инерции. Какая же величина будет аналогом импульса тела? Ею является момент импульса тела относительно оси.
Моментом импульса (количества движения) материальной точки А относительно неподвижной точки О называется физическая величина, определяемая векторным произведением:
L = [ rp | = [ r m v ],

где r — радиус-вектор, проведенный из точки О в точку A; p = m v — импульс материальной точки (рис.28); L —псевдовектор, его направление совпадает с направлением поступательного движения правого винта при его вращении от r к p. Модуль вектора момента импульса
L = rp sinalfa =mvr sinalfa= pl,
где a — угол между векторами r и p, l — плечо вектора р относительно точки О.
Моментом импульса относительно неподвижной оси z называется скалярная величина Lz, равная проекции на эту ось вектора момента импульса, определенного относительно произвольной точки О данной оси. Значение момента импульса Lz не зависит от положения точки О на оси z.
При вращении абсолютно твердого тела вокруг неподвижной оси z каждая отдельная точка тела движется по окружности постоянного радиуса ri с некоторой
скоростью vi. скорость vi; и импульс m ivi
перпендикулярны этому радиусу, т. е. радиус является плечом вектора mi v i. Поэтому можем записать, что момент импульса отдельной частицы
Liz = тiviri (19.1)
и направлен по оси в сторону, определяемую правилом правого винта.
Момент импульса твердого тела относительно оси есть сумма моментов импульса отдельных частиц:

Используя формулу (17.1) vi = wri, получим

т. е.
Lz = Jzw. (19.2)
Таким образом, момент импульса твердого тела относительно оси равен произведению момента инерции тела относительно той же оси на угловую скорость.
Продифференцируем уравнение (19.2) по времени:

т. е.
dLz/dt= Mz
Это выражение — еще одна форма уравнения (закона) динамики вращательного движения твердого тела относительно неподвижной оси: производная момента импульса твердого тела относительно оси равна моменту сил относительно той же оси.
Можно показать, что имеет место векторное равенство
d L /dt= М. (19.3)
В замкнутой системе момент внешних сил М =0 и d L /dt=0, откуда
L = const. (19.4)
Выражение (19.4) представляет собой закон сохранения момента импульса: момент импульса замкнутой системы сохраняется, т. е. не изменяется с течением времени.
Закон сохранения момента импульса — фундаментальный закон природы, Он связан со свойством симметрии пространства — его изотропностью, т. е. с ин-


вариантностью физических законов относительно выбора направления осей координат системы отсчета (относительно поворота замкнутой системы в пространстве на любой угол).
Продемонстрировать закон сохранения момента импульса можно с помощью скамьи Жуковского. Пусть человек, сидящий на скамье, которая без трения вращается вокруг вертикальной оси, и держащий в вытянутых руках гантели (рис. 29), приведен во вращение с угловой скоростью w1. Если человек прижмет гантели к себе, то момент инерции системы уменьшится. Поскольку момент внешних сил равен нулю, момент импульса системы сохраняется и угловая скорость вращения w2 возрастает. Аналогично, гимнаст во время прыжка через голову поджимает к туловищу руки и ноги, чтобы уменьшить свой момент инерции и увеличить тем самым угловую скорость вращения.
Сопоставим основные величины и уравнения, определяющие вращение тела вокруг неподвижной оси и его поступательное движение (табл.2).
Свободные оси. Гироскоп
Для того чтобы сохранить положение оси вращения твердого тела с течением времени неизменным, используют подшипники, в которых она удерживается. Однако существуют такие оси вращения тел, которые не изменяют своей ориентации в пространстве без действия на нее внешних сил. Эти оси называются свободными осями (или осями свободного вращения). Можно доказать, что в любом теле существуют три взаимно перпендикулярные оси, проходящие через центр масс тела, которые могут служить свободными осями (они называются главными осями инерции тела). Например, главные оси инерции однородного прямоугольного параллелепипеда проходят через центры противоположных граней (рис. 30). Для однородного цилиндра одной из главных осей инерции является его геометрическая ось, а в качестве остальных осей могут быть две любые взаимно перпендикулярные оси, проведенные через центр масс в плоскости, перпендикулярной геометрической оси цилиндра. Главными осями инерции шара

являются любые три взаимно перпендикулярные оси, проходящие через центр масс.
Для устойчивости вращения большое значение имеет, какая именно из свободных осей служит осью вращения.
Можно показать, что вращение вокруг главных осей с наибольшим и наименьшим моментами инерции оказывается устойчивым, а вращение около оси со средним моментом — неустойчивым. Так, если подбросить тело, имеющее форму параллелепипеда, приведя его одновременно во вращение, то оно, падая, будет устойчиво вращаться вокруг осей <
|
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 4432; Нарушение авторских прав?; Мы поможем в написании вашей работы!