КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основные понятия и определения. Seminar / tutorial plan
|
|
|
|
Seminar / tutorial plan.
Theme 1: Introduction to “History of Ukrainian Culture” course
Theoretical points for discussion at a seminar (tutorial):
Students are expected to work independently to prepare oral or written reports on the topics:
1. Subject and tasks of “History of Ukrainian Culture”.
2. Definition of culture.
3. Structure of culture.
4. Forms of culture.
5. Functions culture performs.
6. Place of culture in our life and society.
7. Ukrainian culture in a context of world culture (theme 1).
Individual practical tasks:
Prepare synopses on the following topics:
1. Culture genesis.
2. Cultural shock.
Prepare a PowerPoint presentation of
1. A foreign student’s national culture;
2. Religion(s) of a foreign student’s country.
Большие скорости протекания рабочих процессов в различных технических устройствах и повышение требований к точности выдерживания их параметров привели к широкому применению систем автоматического управления. Автомат – слово греческого происхождения, которое дословно обозначает – самодействующий, то есть, это устройство или механизм, который может выполнять некоторую работу без участия человека. Теория автоматического управления изучает общие принципы построения, способы расчета и методы анализа работы систем автоматического управления и необходимых для них технических устройств.
Система автоматического управления должна обеспечивать поддержание на определенном уровне или изменение по заданному закону некоторых переменных характеристик (регулируемых параметров) в машинах и агрегатах без участия человека с помощью различного рода технических средств. Под с истемой автоматического управления (САУ) понимают объединение объекта управления, режимом работы которого требуется управлять, и устройств для осуществления такого управления, рис. 1.
 |
В САУ преобразование входного сигнала (которым обычно является задающее воздействие) в выходной сигнал (регулируемый параметр) определяет закон изменения регулируемого параметра. Реализация желаемого закона осуществляется в результате формирования управляющего воздействия, которое действует на объект регулирования посредством регулирующего органа. Законы изменения регулируемой величины во времени могут быть различными; математически они описываются законом регулирования системы. Этот закон может реализовать пропорциональную зависимость выходного сигнала от входного, связь в виде производной или интеграла и т. д. В более общем случае этот закон может быть нелинейным. Законы регулирования в САУ нарушаются под влиянием внешних или внутренних воздействий, которые называют возмущающими воздействиями. Из определения этих воздействий видно, что система автоматического регулирования должна как можно точнее воспроизводить задающее воздействие и возможно меньше реагировать на возмущающее воздействие.
Краткая историческая справка. Первые известные автоматически действующие системы появились в храмах Вавиона и Египта еще за несколько сотен лет до н. э. Они продавали "святую воду", открывали двери храма при зажигании жертвенного огня. В Греции за 300 лет до н. э. созданы поплавковые регуляторы основанные на принципе обратной связи, которые были применены в водяных часах (рис. 1). В I веке до нашей эры жил изобретатель первых програмных автоматически действующих театров Герон Александрийский.
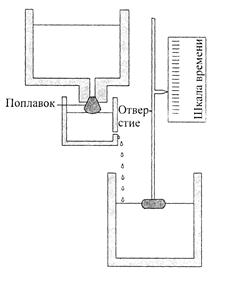
Рис. 2. Водяные часы
Первым автоматическим регулятором промышленного назначения считается центробежный регуляторДжеймса Уатта, разработанный в 1769 г. для управления скоростью вращения вала паровой машины, рис. 2. С помощью этого полностью механического устройства производилось измерение скорости вращения вала машины. При увеличении скорости металлические шарики за счет центробежной силы расходились, что приводило к перемещению втулки вверх по оси регулятора. Это перемещение с помощью рычажного механизма передавалось на клапан, который уменьшал подачу пара в машину и, следовательно, скорость вращения вала. Для приведения регулятора в действие от машины отбиралась некоторая мощность, поэтому измерение скорости проводилось не точно. В России первой в истории системой с обратной связью был поплавковый регулятор уровня воды в паровом котле, изобретенный И. Ползуновьш в 1765 г., рис. 3. С помощью поплавка измерялся уровень воды, а рычажный механизм воздействовал на клапан, регулировавший подачу воды в котел.
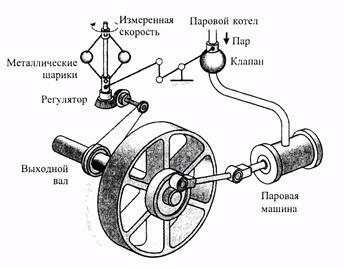
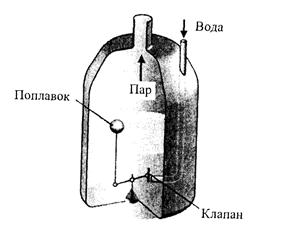
Рис. 3. Центробежный регулятор Уатта. Рис. 4. Поплавковый регулятор уровня воды Ползунова.
Период до середины 19-го столетия характеризовался появлением систем автоматического управления, главным образом, благодаря интуиции и изобретательству. Попытки увеличить точность управления приводили к медленному затуханию колебаний во время переходных процессов и даже к потере системой устойчивости. Тогда и возникла необходимость разработки теории автоматического управления. Дж. Максвелл, используя дифференциальное уравнение как модель регулятора, заложил математические основы теории управления. Его работа была посвящена исследованию влияния изменения параметров системы на ее поведение. В те же годы И. А. Вышнеградский сформулировал математическую теорию регуляторов.
Перед Второй мировой войной развитие теории и практики управления в США и Западной Европе шло по несколько иному пути, нежели в России и Восточной Европе. В США в это время основные усилия были направлены на применение обратной связи в системах телефонии и электронных усилителях. В работах американских исследователей было предложено описывать работу усилителей с обратной связью с помощью частотных характеристик. В бывшем же Советском Союзе математики и механики опережали западных ученых в области собственно теории управления, причем акцент делался на анализ систем во временной области с использованием дифференциальных уравнений.
Большой толчок развитию теории и практики автоматического управления дала Вторая мировая война, когда возникла потребность в создании автопилотов, систем орудийной наводки, станций радарного слежения и других устройств военного назначения, работающих на основе принципа обратной связи. До 1940 г. в большинстве случаев синтез систем управления проводился методом проб и ошибок и являлся своего рода искусством. В 40-е годы значительно выросло число аналитических методов синтеза, и теория управления стала настоящей инженерной дисциплиной.
После Второй мировой войны в теории управления по-прежнему преобладали частотные методы, но наряду с этим возросла роль преобразования Лапласа и комплексной s -плоскости. В 50-е годы акцент в теории управления был сделан на разработку методов, связанных с использованием s -плоскости, в частности, метода корневого годографа. В 80-е годы в системах управления стали широко применять цифровые компьютеры.
Запуск первого искусственного спутника Земли и начало космической эры дали новый толчок развитию техники управления. Возникла необходимость создания сложных, высокоточных систем управления для ракет и космических зондов, а возросшие требования к точности этих систем и желание минимизировать массу спутников обусловили повышенный интерес к теории оптимального управления. Именно поэтому в последние десятилетия стали популярными методы анализа и синтеза во временной области, разработанные Ляпуновым, Минорским и другими учеными, в особенности Л. С. Понтрягиным в СССР и Р. Беллманом в США. Не вызывает сомнения, что при решении задач анализа и синтеза систем автматического управления одновременно должны использоваться как частотные, так и временные методы.
Области использования САУ. В настоящее время существует большое число различных по своему назначению систем автоматического регулирования. Одни из них поддержи-вают заданную температуру, давление, расход жидкости или газов в обьектах регулирования, другие изменяют эти параметры по различным законам. Автоматические системы обеспечивают также регулирование концентрации жидкостей или газов, натяжение проволоки или ткани при их намотке на барабани. С помощью систем регулирования режется металл на заданнне длины, фрезеруются детали сложной формы, очищаются газы и жидкости от вредных примесей и т. д.
Автоматические системи применяют и для управлення скоростью вращения гидравлических и парових турбин, дизелей, регулирования напряжения на электростанциях. Их используют также для регулирования мощности в ядерних знергетических реакторах, удержання электронного пучка в линейных ускорителях, регулирования тока в физических установках.
Системы автоматического регулирования управляют движением самолетов и ракет, обеспечивают ориентацию и угловую стабилизацию космических летательних аппаратов. С помощью систем автоматического регулирования был взят грунт с Луны и Марса.
Принципы автоматического управления. Существует три основных принципа построения САУ, обеспечивающих реализацию требуемого закона изменения регулируемого параметра: по разомкнутому контуру, по замкнутому контуру, по комбинированному контуру регулирования (замкнуто-разомкнутый). Принцип разомкнутого цикла заключается в обеспечении требуемого закона изменения регулируемой величины непосредственно путем преобразования управляющего воздействия, рис. 5. Принцип замкнутого цикла характеризуется сравнением управляющего воздействия с действительным изменением регулируемой величины за счет применения обратной связи и элемента сравнения. Образующийся в результате сравнения сигнал ошибки не должен превышать некоторой заданной величины. За счет этого и обеспечивается в замкнутых системах требуемый закон изменения регулируемой величины, рис. 6. Сравнивая свойства первого и второго принципов регулирования, необходимо отметить большую скорость реакции на внешние обстоятельства принципа регулирования по возмущению и большую точность регулирования по отклонению.



Позитивные свойства названных принципов регулирования привели к изобретению третьего принципа – комбинированного регулирования, которому присущи оба позитивные показателя качества регулирования – быстродействие и значительная точностю регулирования. Комбинированный принцип заключается в сочетании замкнутого и разомкнутого контуров в одной системе, рис. 7.
В середине прошлого столетия был открыт четвертый принцип управления – адаптивный. Для нормального функционирования систем, работающих по адаптивному принципу не требуется полних знаний о характере процесса регулирования, так как в процессе работы эти системы приспосабливаются к изменяющимся внешним условиям. Этот принцип управления используется в сложных системах, которые работают в условиях малодоступных для контроля человеком их действий (космические системы, роботы, автоматы для работы в глубинах океана, в условиях высокого уровня радиации, и др.).
|
|
Классификация систем автоматического управления. САУ можно классифицировать по различным признакам: принципу действия, характеру сигналов, математическому описанню, виду используемой знергии и т. д.
По принципу действия САУ делят на четыре класса: системы, работающие по разомкнутому, замкнутому, комбинированному контурам, а также адаптивные системы. В каждом классе САУ выделются группы.
САУ, работающие по разомкнутому контуру, делятся на системы компенсации и разомкнутые системы программного регулирования. Системы компенсации уменьшают влияние возмущающих воздействий на регулируемые параметры путем изменения самих воздействий или компенсации их действия на системы. Широкое применение получили разомкнутые системы программного регулирования. К ним относятся металлорежущие станки с числовым программным управлением. Программа управления, записанная на магнитных запоминающих устройствах в цифровом коде, поступает на исполнительные устройства станков, обеспечивая заданную последовательность выполнения операций обработки.
Системы автоматического управления, работающие по замкнутому контуру, делятея на системы автоматической стабилизации, системы программного регулирования и следящие системы.
В системах автоматической стабилизации заданные значения регулируемого параметра являютея постоянными величинами. К системам стабилизации относятся регуляторы Уатта и Ползунова, системой стабилизации является автопилот самолета. На рис. 8 приведена схема автопилота, предложенная К.Э. Циолковским, для стабилизации дирижабля в горизонтальном полете.
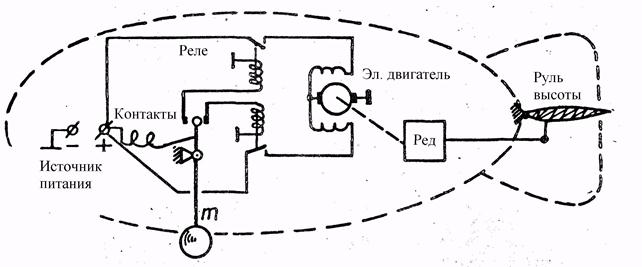
Рис. 8. Автопилот К.Э. Циолковского для стабилизации дирижабля в горизонтальном полете.
Системы программного регулирования отличаютея от систем стабилизации тем, что в них заданные значения регулируемого параметра являются известнымими функциями времени. Автоматические системы программного регулирования должна обеспечивать изменение режима работы объекта по наперед заданной программе. Примером такой системы является система автоматического запуска авиационного реактивного двигателя.
В следящих системах управляющие воздействия представляют собой функции времени, заранее неизвестные. Задачей этих систем является изменение рабочего режима объекта при условии отсутствия заранее известного порядка, вслед за изменением некоторого ведущего параметра. Как пример следящей системы можно привести штурвальную систему управления полетом самолета, когда рулевые поверхности перемещаются вслед за перемещением штурвала.
Комбинированные САУ делятся на две группы: системы автоматической стабилизации и следящие системы. Эти системы могут иметь один или два разомкнутых контура, компенсирующих влияние управляющих и возмущающих воздействий.
Адаптивные системы управления относят к самонастраивающимся системам, в таких системах выделют следующие группы: самонастраивающиеся системы экстремального регулирования, системы с перестраивающимися устройствами и аналитические самонастраивающиеся системы. В экстремальных системах автоматический регулятор поддерживает экстремальное значение регулируемой величины путем подачи поискового сигнала. В системах с перестраивающимися устройствами параметры или структура САУ автоматически изменяются в зависимости от управляющих и возмущающих воздействий или от изменения параметров объекта. Перестройка свойств аналитических самонастраивающихся систем осуществляется на основе аналитического определения их динамических характеристик, в состав аналитических самонастраивающихся систем должны входить вычислительные машины.
По характеру сигналов все системы можно разделить на непрерывные, дискретные, дискретно-непрерывные (цифровые) и релейные. В непрерывных системах все сигналы в устройствах и объектах регулирования представляют собой непрерывные функции времени. В дискретных системах все сигналы квантуются по времени, а в дискретно-непрерывных — как по времени, так и по уровню. В последнем классе систем имеются две группы устройств регулирования: непрерывные и дискретные. При квантовании непрерывного сигнала по уровню образуется ступенчатый сигнал. Элементы, осуществляющие квантование сигнала по уровню, называются релейными, а системы с подобного рода элементами — релейными системами автоматического регулирования.
По математическому описанию все системы делятся на два класса: линейные и нелинейные (по виду дифференциальных уравнений, описывающих поведение системы в динамике). При такой классификации каждый класс систем можно разбить на четыре группы: 1) стационарные с сосредоточенными параметрами; 2) стационарные с сосредоточенными и распределенными параметрами; 3) нестационарные системы с сосредоточенными параметрами; 4) нестационарные системы с сосредоточенными и распределенными параметрами. Первая группа систем описывается обыкновенными дифференциальными уравнениями с постоянными параметрами. В системах с распределенными параметрами (вторая группа) отдельные устройства системы или ее объекты описываются дифференциальными уравнениями в частных производных. В системах третьей и четвертой групп параметры дифференциальных уравнений изменяются в зависимости от времени. Каждая группа систем может быть разделена на две подгруппы: на детерминированные и стохастические.
По виду используемой энергии все САУ можно подразделить на электрические, гидравлические, пневматические, электро-гидравлические, электропневматические и т. п.
Всякая САУ состоит из объекта регулирования и регулятора, в который входит чувствительный элемент. Системы регулирования, где чувствительный элемент воздействует непосредственно на регулирующий орган, называют системами прямого регулирования, а регуляторы – регуляторами прямого действия. В регуляторах прямого действия энергия, необходимая для изменения положения регулирующего органа, поступает от чувствительного элемента. Если последний не в состоянии развить мощность, требуемую для нормальной работы регулирующего органа, то система регулирования не может функционировать. Кроме того, системы прямого регулирования имеют низкую точность и поэтому применяются редко.
В системах непрямого регулирования после чувствительного элемента устанавливаются усилители мощности и серводвигатели, воздействующие на регулирующие органы. В этом случае повышается точность и качество процессов регулирования.
В зависимости от числа регулируемых величин системы автоматического регулирования подразделяют на одномерные (одна регулируемая величина), двухмерные (две регулируемые величины) и многомерные (при п регулируемых величинах). Многомерные системы регулирования могут быть системами несвязанного и связанного регулирования. В системе несвязанного регулирования регуляторы, управляющие различными переменными, не связаны один с другим и работают независимо. В системе связанного регулирования регуляторы связаны между собой, и для нормальной работы требуется их вполне определенное взаимодействие.
Примеры систем управления.
Упрощенная блок-схема САУ движением самолета изображена на рис. 9 (а). Желаемое направление движения сравнивается с результатом измерения действительного направления и в итоге образуется ошибка.
а)


б) в)
Рис. 9. САУ движением самолета
Информация о действительном направлении поставляется за счет визуальной и тактильной обратной связи. Дополнительная обратная связь образуется ощущением рычага управления, рис. 9 (б) руками летчика (датчиком). На рис. 9 (в) изображена типичная реакция самолета на действия летчика. Система на рис. 9 – это система с отрицательной обратной связью, т. к. выходной сигнал вычитается из входного.
Рассмотрим замкнутую систему управления посадкой самолёта. В данном случае пилот имеет три основных задачи. Во-первых, самолёт должен приближаться к аэродрому, выдерживая курс по центру посадочной полосы, как показано на рис. 10. На этом рисунке также показана и вторая задача пилота – соблюдение надлежащей глиссады. Третьей задачей является выдерживание правильной скорости. Рассмотрим только задачу удержания самолёта по центру посадочной полосы (задачу управления горизонтальным положением самолёта). Функциональная схема системы, решающей данную задачу, приведена на рис. 11.
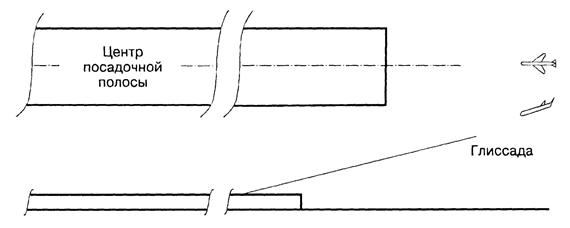
Рис. 10. Посадка самолета
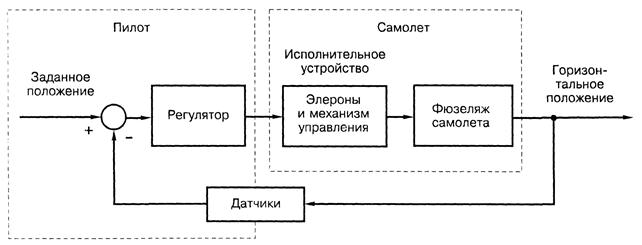
Рис. 11. Функциональная схема системы посадки самолета
Предполагается, что горизонтальное положение самолёта регулируется с помощью элеронов, специальных плоскостей в задней части каждого крыла. На самом деле для управления горизонтальным положением используется также руль поворота, но мы для простоты ограничимся только элеронами. Элероны в совокупности с механизмами, изменяющими угол их наклона, образуют исполнительное устройство системы управления. В данной системе пилот использует несколько датчиков для определения горизонтального положения самолёта. Он может сделать это с помощью прибора на панели управления в кабине самолёта. Кроме того, пилот обычно визуально наблюдает посадочную полосу и может оценить положение самолёта относительно её центра. Таким образом пилот знает желаемое горизонтальное положение самолёта и имеет информацию о действительном положении. Он управляет элеронами так, чтобы самолёт занял желаемое горизонтальное положение. В терминах систем управления мы обычно разность между желаемым и действительным положением называем ошибкой системы.
В системе на рис. 11 функции регулятора выполняет пилот, который также выступает в качестве датчика и одновременно управляет элеронами. Оценивая положение самолёта, пилот управляет элеронами таким образом, чтобы свести ошибку к нулю. Качество выполнения пилотом этих действий определяется степенью его тренированности. Например, для большого пассажирского лайнера действия пилота должны быть совершенно иными, нежели для небольшого одномоторного самолёта. То есть, мы можем сказать, что функции регулятора заложены в сознании пилота и являются результатом интенсивной тренировки. Цель её в том, чтобы при каждой посадке при одних и тех же обстоятельствах предпринимались одни и те же действия.
Во многих аэропортах, например, большой пассажирский лайнер может быть заведён на посадку автоматически. Ещё более сложная система управления посадкой характерна для авианосцев. Система автоматической посадки также может быть представлена схемой на рис. 11. Однако элеронами здесь управляет автопилот, который в свою очередь является замкнутой системой управления. Роль датчика обычно выполняет радар, который определяет положение самолёта относительно центра посадочной полосы. Функции регулятора выполняет цифровой компьютер, который решает систему уравнений и вырабатывает команды, подаваемые на автопилот. В системах автоматической посадки самолёта обычно используется ПИД-регулятор, который наиболее характерен для систем управления с обратной связью.
Структура САУ. Система автоматического управления структурно состоит из отдельных устройств (элементов автоматики), которые выполняют определенные функции. В целом, в САУ можно выделить объект управления регулирования, датчик и автоматический регулятор.
Объектом управления (регулирования) называют любую машину (аппарат, агрегат, станок, двигатель и др.), режимом работы которой необходимо управлять. Режим работы объекта управления определяется сочетанием параметров, характеризущих работу этого объекта. Параметры делят на главные и второстепенные. Управляют режимом работы объекта изменяя значения главных параметров, эти параметры и выбирают как регулируемые параметры. Режим работы объекта может определяться одним или несколькими регулируемыми параметрами.
Датчиком или чувствительным элементом является устройство, которое реагирует на изменение значения регулируемого параметра. Датчик является обязательным элементом любогоо автоматического регулятора. Задатчик – это устройство, которое включается в систему параллельно датчику и служит для подачи в регулятор заданного значения регулируемого параметра. Как правило сигналы датчика и задатчика обрабатываются в сумматоре, в котором вычисляется разница этих сигналов, по которой формируется управляющий сигнал регулятора.
Автоматический регулятор включает измерительные и усилительные элементы, исполнительные механизмы и регулирующие органы, а также, корректирующие устройства.
На рис. 12 показана типовая блок-схема САУ, состоящая из задающего устройства З, на вход которого поступает входной сигнал (заданное значение регулируемого параметра); суммирующих устройств С1 и С2; усилителя У; исполнительного механизма ИМ и регулирующего органа РО; корректирующих устройств последовательного действия К1 и параллельного действия К2; объекта управления ОУ и измерительного элемента Д. Элементы З, Д, С1 образуют датчик, элементы К1, С2, У, ИМ, РО, К2 – регулятор. Устройства системы, изображенной на рис. 1, соединяются друг с другом с помощью линий связи. Элемент К2 с линией ОСвн образует внутреннюю обратную связь. Внутренняя обратная связь обычно осуществляет не только передачу самого сигнала с выхода регулятора, но и учитывает его изменение во времени, поэтому ее называют гибкой обратной связью. При вычитании сигнала обратной связи в сумматоре, обратная связь является отрицательной, а при суммировании – положительной. Линия ОСгл представляет собой главную обратную связь системы. За счет действия главной обратной связи в системе образуется сигнал ошибки, характеризующий точность работы всей системы регулирования.
Исполнительный механизм регулятора служит для преобразования усиленного управляющего сигнала в перемещение регулирующего органа объекта. В качестве исполнительного механизма обычно используют электрический, гидравлический или пневматический двигатель, который обязательно должен быть реверсивным. В исполнительный механизм могут включаться концевые выключатели, редукторы, датчики положения регулирующего органа и другие элементы.
Корректирующие элементы служат в системе автоматического управлениня для коррекции качества процесса управления.
В автоматических системах могут использоваться дополнительные чувствительные элементы (для измерения возмущения), логические элементы и другие специальные устройства.
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 1003; Нарушение авторских прав?; Мы поможем в написании вашей работы!