КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Достоинства и недостатки. 6 страница
|
|
|
|
 Термоэлектрические преобразователи-
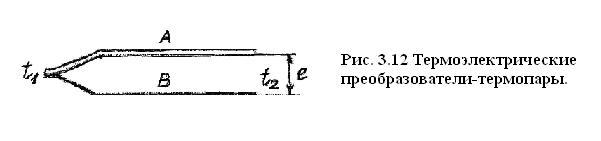
Термоэлектрические преобразователи-  термопара — относятся к устройствам генераторного типа. Они работают на принципе возникновения термоэлектродвижущей силы (термо-ЭДС) в двух сваренных друг с другом разнородных металлах А и Б при нагреве места спая (рис. 3.12). Значение термо-ЭДС пропорционально разности температур ∆t между спаем и свободными концами: е = k∆t (к — термоэлектрический коэффициент, зависящий от свойств материалов термопары). Значение термо-ЭДС не зависит от формы и геометрических размеров электродов. ЭДС на свободных концах термопары объясняется тем, что энергия свободных электронов в разных материалах неодинакова и по-разному зависит от температуры. Однако с ее увеличением энергия свободных электронов возрастает. Это вызывает их поток к холодному концу термопары, где накапливается отрицательный заряд. Разное число свободных электронов вызывает разность потенциалов на их свободных концах. При замыкании свободных концов потечет электрический ток, значение которого пропорционально разности t1 — t2
термопара — относятся к устройствам генераторного типа. Они работают на принципе возникновения термоэлектродвижущей силы (термо-ЭДС) в двух сваренных друг с другом разнородных металлах А и Б при нагреве места спая (рис. 3.12). Значение термо-ЭДС пропорционально разности температур ∆t между спаем и свободными концами: е = k∆t (к — термоэлектрический коэффициент, зависящий от свойств материалов термопары). Значение термо-ЭДС не зависит от формы и геометрических размеров электродов. ЭДС на свободных концах термопары объясняется тем, что энергия свободных электронов в разных материалах неодинакова и по-разному зависит от температуры. Однако с ее увеличением энергия свободных электронов возрастает. Это вызывает их поток к холодному концу термопары, где накапливается отрицательный заряд. Разное число свободных электронов вызывает разность потенциалов на их свободных концах. При замыкании свободных концов потечет электрический ток, значение которого пропорционально разности t1 — t2
Конструктивное исполнение термопар зависит от назначения. 1Чаще всего электроды термопары с рабочим спаем помещают в герметизируемой трубке из нержавеющей стали или фарфора, предохраняющих электроды от механических и других повреждений. Материалом термопар обычно являются хромель-копель, хромель-алюмель, платино-платинородий и др. Генерируемая ими ЭДС составляет 0,01...0,07 мВ/°С. Для повышения чувствительности термопар (до 1 мВ/°С) их изготовляют из полупроводников.
Для замера расхода или уровня используют следующие воспринимающие элементы: скоростные, объемные, переменного и постоянного перепадов.
|
|
|
Скоростной воспринимающий элемент (рис. 3.13, а) представляет собой крыльчатку, устанавливаемую в потоке жидкости (газов). Вал крыльчатки передает вращение на датчик системы регулятора.
Объемный воспринимающий элемент может иметь различное конструктивное исполнение, например в виде шестеренчатого насоса (рис. JI.13, б), в котором овальные шестерни / при вращении за каждый оборот пропускают строго определенный объем жидкости. В качестве датчика расхода может применяться также аксиально-поршневой гидравлический двигатель, к валу которого и подключают измеритель.
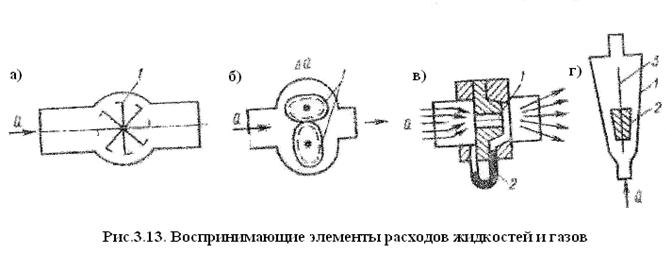
Датчик с элементом переменного перепада (рис. 3. 13, в) работает по принципу разности давления до и после дросселя 1, которое регистрируется манометром 2.
Датчик постоянного перепада — ротаметр (рис. 3.13) — имеет в коническом корпусе 1 поплавок 2 с линейкой 3. Изменение расхода жидкости или газа вызывает изменение положения поплавка и, следовательно, проходного сечения между ним и корпусом. Равновесие поплавка наступает при выравнивании давления на входе и выходе среды из ротаметра.
Уровень жидкости или сыпучих материалов в отличие, например, от температуры и давления можно непосредственно наблюдать. Однако если это невозможно, то по принципу измерения различают приборы:
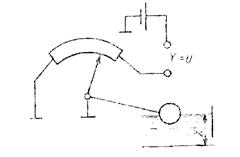
поплавковые и буйковые — чувствительным элементом является плавающий (рис. 3. 14) или полностью погруженный в измеряемую жидкость поплавок (буек);
емкостные — используется изменение электрической емкости датчика при изменении уровня измеряемой среды;
радиоактивные — основаны на изменении протекающего через объект потока излучения при изменении уровня;
мембранные — чувствительным элементом является мембрана; давление столба измеряемой жидкости уравновешивается упругой деформацией мембраны или пружины;
 приборы давления (поплавковые, сильфонные, мембранные) — основаны на измерении давления столба рабочей жидкости.
приборы давления (поплавковые, сильфонные, мембранные) — основаны на измерении давления столба рабочей жидкости.
|
|
|
Полученная с первичных преобразователей (датчиков) информация должна быть соответствующим образом переработана. Одна из задач переработки — определение величины полученного сигнала (измерение его), т. е. сравнение с эталоном. Роль таких элементов выполняют измерительные схемы.
|
|
Существует два метода преобразования информации о состоянии объекта: метод прямого преобразования и метод уравновешивания.
Метод прямого преобразования характеризуется тем, что все преобразования информации производятся только в одном, прямом, направлении. Аналогом такого преобразования может служить управление по разомкнутому циклу (см. рис. ^.1), где управляющим устройством является датчик, например, температуры (термопара), а объектом управления — милливольтметр.
Метод прямого преобразования отличается сравнительно низкой точностью, однако имеет и ряд преимуществ: простота конструкции, меньшая масса и стоимость, высокое быстродействие. Метод уравновешивания предусматривает использование двух цепей преобразователей: прямого и обратного преобразования. Аналогом, реализующим метод уравновешивания, может быть управление по замкнутому циклу (см. рис. 3.2). Здесь благодаря обратной связи на вход объекта управления (измерительного прибора) поступает только небольшая часть входной преобразуемой величины со знаком «+» или «—», характеризующей степень неравновесия. Метод уравновешивания применяется в ряде приборов (систем) с мостовыми равновесными и компенсационными измерительными схемами.
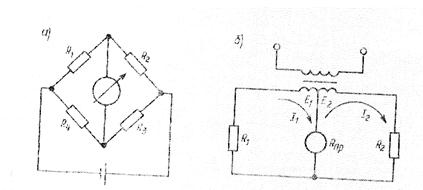
Мостовая схема переменного тока аналогична мосту постоянного тока, но отличается от него тем, что плечи состоят из сопротивлений, имеющих как активные составляющие, так и реактивные. Дифференциальная измерительная схема состоит из двух смежных контуров (рис.3.15, б), в каждом из которых действует своя ЭДС (EiEi). Измерительный прибор с сопротивлением %1р включен в ветвь, общую для обоих контуров. Такая схема удобна при использовании индуктивных датчиков. В этом случае Ri и R2 являются их сопротивлениями. Дифференциальная схема проще мостовой и в ряде случаев имеет более высокую чувствительность.
|
|
|
 Измерительный прибор, включенный в общую ветвь, показывает разность контуров токов. Эта разность появляется в результате изменения одной (обеих) ЭДС или одного (обоих) сопротивлений (например, у датчиков-тензорезисторов). В большинстве случаев мощность выходного сигнала воспринимающего или преобразующего элемента недостаточна для управления исполнительным элементом. Для количественного изменения этой мощности (энергии) применяют усилительные элементы.
Измерительный прибор, включенный в общую ветвь, показывает разность контуров токов. Эта разность появляется в результате изменения одной (обеих) ЭДС или одного (обоих) сопротивлений (например, у датчиков-тензорезисторов). В большинстве случаев мощность выходного сигнала воспринимающего или преобразующего элемента недостаточна для управления исполнительным элементом. Для количественного изменения этой мощности (энергии) применяют усилительные элементы.
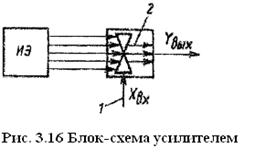
Усилителем (рис. 3.16) называют устройство, которое увеличивает энергию входного (управляющего) сигнала за счет энергии вспомогательного источника питания (ИЭ). Управляющий поток энергии, действуя на регулирующий орган, изменяет величину управляемого потока 2.
В системах автоматики широко используют усилители-преобразователи, которые помимо усиления осуществляют преобразование входного сигнала Хвх в другой вид выходного сигнала Увых, например постоянного тока в переменный.
Основной показатель усилителя — коэффициент усиления. Различают коэффициенты усиления по току, напряжению и мощности:
KL=Iвых/Iвх Кu=Uвых/Uвх Кр=Рвых/Рвх
где 1ВЫХ 1ВХ — выходное и входное значения тока, А; Uвых Uвх — выходное и входное значения напряжения, В; Рвых, Рвх — выходная и входная мощность, Вт. Иногда для значительного увеличения входного сигнала усилители или их каскады соединяют последовательно, тогда общий коэффициент усиления Ko6=KiK2...Kп
где Кп — коэффициент усиления отдельного каскада усилителя. В зависимости от вида усиливаемого сигнала различают усилители электрические, магнитные, пневматические и гидравлические. Кроме того, усилители классифицируют по принципу действия на усилители аналогового действия и дискретного, т. е. релейного (переключатели). Выбор типа усилителя для той или иной системы определяется конкретными условиями применения.
Электромагнитные (электромеханические) усилители-механотроны применяют в системах, где необходимо иметь скачкообразную (релейную) статическую характеристику. Эти усилители отличаются простой конструкцией, сравнительно малыми размерами, высокой стабильностью характеристик, малой стоимостью. Недостаток релейных усилителей — наличие подвижных частей и некоторая инерционность. Электронные усилители (ламповые и полупроводниковые) характеризуются возможностью усиления слабых электрических сигналов, высоким коэффициентом усиления, без инерционностью, отсутствием подвижных частей, большим диапазоном усиливаемых частот. Недостатки усилителей на электровакуумных лампах — невысокая механическая прочность (сопротивление ударам, вибрации), малый срок службы. В этом отношении от них положительно отличаются усилители на металлокерамических лампах. Полупроводниковые усилители отличаются большой надежностью и долговечностью в работе, малыми размерами и массой, экономичностью, мгновенной готовностью к работе, высоким коэффициентом усиления, вибро- и ударостойкостью, способностью усиления слабых сигналов, большим диапазоном усиливаемых частот. Недостатки — зависимость характеристик усилителя от температуры, а также большой разброс параметров.
|
|
|
Магнитные усилители характеризуются большой надежностью, долговечностью, высокими эксплуатационными качествами, высоким коэффициентом усиления и перегрузочной способностью. Недостатки магнитных усилителей — сравнительно высокая инерционность, сложность в осуществлении больших входных сопротивлений, повышенная чувствительность к температурным изменениям, большие габариты и масса.
Электро машинные усилите ли применяют в качестве усилителей мощности для управления объединенными с ними исполнительными элементами постоянного тока. Эти усилители целесообразно использовать в системах мощностью более 100 Вт. Достоинство этих усилителей — возможность управления большими мощностями, высокий коэффициент усиления, сравнительно малая инерционность; недостатки — наличие коллектора и щеток, которые требуют тщательного ухода, непостоянство параметров, склонность к колебанию при перекомпенсации.
Гидравлические и пневматические усилители применяют в системах гидре- и пневмоавтоматики, Достоинства этих усилителей — высокая помехоустойчивость, большой коэффициент усиления, возможность управления исполнительными элементами большой мощности. Обычно эти усилители выполнены с исполнительными элементами как единый механизм. Недостаток этих усилителей — сложность эксплуатации при отрицательных температурах.
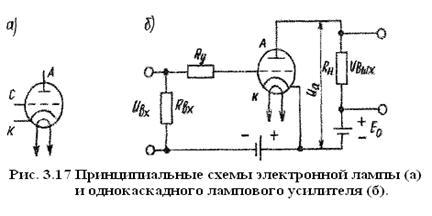
Принцип действия электронных усилителей основан на явлении электронной эмиссии. Под электронной эмиссией понимают физическое явление испускания электронов твердыми телами при внешнем энергетическом воздействии. Так, при нагревании вольфрамовой проволоки до 2000°С с ее поверхности испускаются электроны, которые образуют электронное облако. Сам электрон представляет собой отрицательно заряженную элементарную частицу. Трехэлектродная лампа (триод) представляет вакуумную стеклянную или металлическую колбу с тремя электродами: А — анод, К — катод, С — сетка (рис. 3.17, а). Если к катоду и аноду приложить соответственно отрицательный и положительный потенциалы, то электроны от катода начнут перемещаться на анод, замыкая электрическую цепь. Управление этими электронами, производится сеткой лампы. Если сетка лампы имеет отрицательный потенциал относительно катода, то она отталкивает электроны катода, ток анода отсутствует и лампа является запертой; если на сетку подать положительный потенциал, то лампа откроется и в анодной цепи появится ток. Триоды являются основными частями ламповых усилителей. Их основными характеристиками являются коэффициент усиления 3 частотная и фазовая характеристики. Частотная характеристика усилителя показывает, как изменяется коэффициент усиления от частоты усиливаемого напряжения. Идеальной частотной характеристикой является такая, при которой в определенном частотном диапазоне коэффициент усиления Kv не изменяется. Фазовая характеристика показывает сдвиг фаз усиливаемого сигнала в зависимости от его частоты. Идеальная фазовая характеристика близка к прямой линии с постоянным углом наклона.
Простейший однокаскадный усилитель показан на рис.3.17, б. В цепи сетки действует два напряжения: постоянное отрицательное сеточное смещение Uc и напряжение управляющего сигнала Uвх- Сопротивление Rвx служит для того, чтобы электроны, случайно попавшие на сетку, могли стекать с нее в цепь источника питания. Совместно с входным сопротивлением усилителя Ку оно служит доя ограничения сеточных токов. Работа усилителя сводится к следующему. При отсутствии сигнала управления (Uex = 0) за счет отрицательного смещения управляющей сетки лампы ее анодный ток устанавливается до определенного среднего значения. При подаче управляющего сигнала U≠0) и в зависимости от его полярности результирующее напряжение на управляющей сетке лампы изменяется, что приводит к изменению и анодного тока лампы. Если отрицательное смещение на сетке очень велико, то при отсутствии сигнала управления (Uвx = 0) лампа заперта отрицательным сеточным напряжением смещения (£/с). При подаче управляющего сигнала на сетку Uвх > 0) лампа открывается, в анодной цепи появляется ток, значение которого определяется потоком электронов. Такой режим работы электронной лампы называют релейным.
Полупроводниковое усилители работают по следующему принципу. Известно, что электрический ток создается свободными электронами, т. е. не связанными с атомами. В проводниках таких свободных электронов очень много. Когда к проводнику прикладывают электрическое напряжение, свободные электроны проводника образуют электрический ток, поэтому электрическое сопротивление проводника мало. В диэлектриках же, наоборот, свободных электронов почти нет, все электроны жестко связаны с атомами и, чтобы вырвать их у атома и создать движение электронов, требуется приложить очень большое электрическое напряжение. Именно поэтому электрическое сопротивление диэлектриков велико.
Некоторые вещества, например германий и кремний, одновременно являются и проводниками, и диэлектриками.
Их называют полупроводниками. Большинство электронов в полупроводниках жестко связано с атомами, но все же в них есть электроны, которые при некотором внешнем воздействии тепла, света или электрического напряжения высвобождаются, причем характерно,, что высвобождаются носители не только отрицательного (электроны), но и положительного электричества (так называемые дырки). Если к полупроводнику приложено электрическое напряжение, то электроны начинают двигаться к положительному полюсу, а дырки — к отрицательному. В полупроводнике образуются электронный и дырочный токи.
 Не надо думать, что дырочный ток — это движущиеся атомы, потерявшие электроны. В полупроводниках атомы неподвижны. Они образуют кристаллическую решетку и очень прочно держатся на своих местах. Но атом, потерявший электрон, захватывает электрон соседнего атома и перестает быть дыркой. Соседний атом, отдавший ему свой электрон и превратившийся в дырку, захватывает электрон у другого атома и т. д. Поэтому, хотя атомы и остаются на своих местах, дырки перемещаются, причем в направлении, противоположном движению электронов. Если к полупроводнику не приложено электрическое напряжение, то свободные электроны и дырки перемещаются беспорядочно и стремятся равномерно распределиться по объему проводника. Это стремление, характерное вообще для всех частиц материи, носит название диффузии. Так как в проводнике имеются носители отрицательного (электроны) и положительного (дырки) зарядов электричества, то они не могут долго существовать. Действительно, достаточно свободному электрону наткнуться на нуждающийся в электроне атом (дырку), как он будет «захвачен». При этом одновременно исчезнут свободный электрон и дырка. Такую встречу называют рекомбинацией.
Не надо думать, что дырочный ток — это движущиеся атомы, потерявшие электроны. В полупроводниках атомы неподвижны. Они образуют кристаллическую решетку и очень прочно держатся на своих местах. Но атом, потерявший электрон, захватывает электрон соседнего атома и перестает быть дыркой. Соседний атом, отдавший ему свой электрон и превратившийся в дырку, захватывает электрон у другого атома и т. д. Поэтому, хотя атомы и остаются на своих местах, дырки перемещаются, причем в направлении, противоположном движению электронов. Если к полупроводнику не приложено электрическое напряжение, то свободные электроны и дырки перемещаются беспорядочно и стремятся равномерно распределиться по объему проводника. Это стремление, характерное вообще для всех частиц материи, носит название диффузии. Так как в проводнике имеются носители отрицательного (электроны) и положительного (дырки) зарядов электричества, то они не могут долго существовать. Действительно, достаточно свободному электрону наткнуться на нуждающийся в электроне атом (дырку), как он будет «захвачен». При этом одновременно исчезнут свободный электрон и дырка. Такую встречу называют рекомбинацией.
Используя все эти особенности полупроводникового кристалла, оказалось возможным создать кристаллический прибор, способный усиливать электрические колебания.
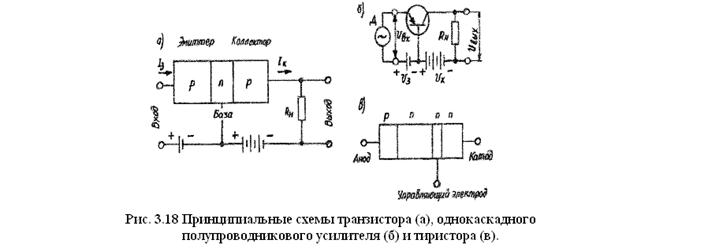
Триод-транзистор (рис. 3.18, а) состоит из трех слоев полупроводников с различной проводимостью: крайние — с дырочной, а между ними (так называемая база) — с электронной. Такая схема записывается следующим образом: р-п-р. Значит, транзистор имеет
два перехода: р-п и п-р. Первый переход р-п включен в прямом направлении, т. е. минус — к я-области, а плюс — к р-области. Через этот переход проходит прямой ток. Второй переход п-р включен в обратном направлении, т. е. плюс — к я-области (базе), а минус — к р-области.
Полупроводники, из которых изготовлены эмиттер и база, подобраны с различной концентрацией основных носителей, т. е. концентрация дырок в эмиттере значительно выше концентрации электронов в базе. Поэтому, когда в результате протекания тока через эмиттерный переход в базу попадают дырки, их оказывается там так много, что только малая часть из них находит необходимые для рекомбинации электроны. Эмиттер как бы насыщает базу дырками. Благодаря диффузии пришедшие дырки начинают перемещаться в области базы, прилегающие к коллектору. К коллекторному переходу приложено обратное напряжение, довольно значительное (в десятки раз больше напряжения, приложенного к эмиттерному переходу), причем полярность коллекторного напряжения такова (на коллекторе — минус), что положительные дырки, подойдя к коллекторному переходу, испытывают действие сильного ускоряющего поля, переходят в коллектор и рекомбинируют с электронами, приходящими в коллектор из отрицательного полюса источника питания. В результате через коллекторный переход проходит электрический ток, несмотря на то что к нему приложено обратное напряжение.
Значение коллекторного тока зависит от значения тока эмиттера. Действительно, чем больше ток через эмиттерный переход, т. е. чем больше дырок «впрыскивает» эмиттер в базу, тем больше ток коллектора, который зависит от числа этих дырок. Поэтому, управляя эмиттерным током, можно управлять и коллекторным током. Схема простейшего полупроводникового усилителя изображена на рис. 2.18, б. В цепь коллектора (на выходе триода) включена нагрузка К„. Источник питания U э подсоединяется в прямом направлении, и поэтому эмиттерный р-л-переход обладает малым сопротивлением. Источник питания в цепи коллектора подсоединяется в обратном направлении, в связи с чем сопротивление коллекторного п-р-перехода имеет значительную величину.
Сопротивление нагрузки Rн при соответствующем подборе напряжения источника питания Uэ может быть достаточно большим по сравнению с сопротивлением на входе усилителя.
Полупроводниковый триод будет усиливать мощность подаваемого сигнала, так как мощность, подводимая к его входу Д, меньше полезной мощности сигнала на выходе.
Тиристор — управляемый полупроводниковый вентиль — имеет четырехслойную кремниевую структуру типа р-η-р-η (рис. 3.18, в) с двумя крайними и двумя внутренними областями. Внешние выводы присоединяются к двум крайним и одной базовой области. Если на анод (внешний р-слой) подан потенциал положительный относительно катода (внешний и-слой), то при приложении между анодом и катодом
тиристора положительного напряжения через прибор начинает протекать слабый ток. При подаче на цепь управляющего электрода положительного потенциала общий ток, проходящий через управляемый полупроводниковый вентиль, возрастает вследствие эффекта транзисторного усиления и небольшая мощность, затраченная в цепи «управляющий электрод — катод», во много раз увеличивает мощность в цепи анода.
Свойства и характеристики управляемых кремниевых вентилей-тиристоров позволяют создавать качественно новые системы управления электрическим приводом постоянного и переменного тока. Тиристорный привод имеет следующие преимущества: бесступенчатое регулирование, незначительную мощность управления, постоянную готовность к включению, возможность работать при вибрации, тряске, ударах. Применение тиристорных преобразователей-усилителей обеспечивает плавность пусковых режимов, улучшение работы механической части, повышение КПД, снижение массы и габаритов аппаратуры, что имеет существенное значение для самоходных машин. Используя тиристорный привод, можно осуществить быстрый переход от автономного источника питания к питанию от сети строительной площадки. Электромагнитное устройство, использующее зависимость изменения магнитной проницаемости ферромагнитного материала изменения напряженности магнитного поля, называют магнитным усилителем. Достоинство магнитных усилителей — отсутствие контактов, высокая чувствительность и долговечность.
Простейший магнитный усилитель или дроссель насыщения работает следующим образом. При питании рабочей обмотки усилителя Wp переменным током напряжением Up ток, протекающий по нагрузке R будет мал ввиду того, что индуктивное сопротивление катушки велико: lH=Up/
где R — активное сопротивление катушки и нагрузки, Ом; cob — индуктивное сопротивление, Ом; со — угловая частота, рад/с; L — индуктивность катушки, Гн,
Индуктивность же катушки зависит от магнитной индукции сердечника, а следовательно, и магнитной проницаемости:
Z=[4πSω2/(10-7L)]µ
где S — сечение магнитопривода, м2; со — число витков катушки;
L — длина магнитопривода, м; µ — магнитная проницаемость материала сердечника, Гн/м.
Управление магнитной проницаемостью µ, а точнее управление напряженностью магнитного поля, производится обмоткой управления Wy в которую подается постоянный ток. При подаче сигнала управления Uy магнитная индукция сердечника магнитного усилителя увеличивается, а магнитная проницаемость его уменьшается. Изменяется индуктивность катушки, уменьшается индуктивное сопротивление рабочей катушки и ток нагрузки возрастает (эффект усиления).
Исполнительным органом или механизмом называют устройство, преобразующее командные сигналы в регулирующее воздействие (перемещение, вращение). Исполнительные органы систем регулирования являются последним звеном цепи автоматического регулирования. Они воздействуют на процесс в соответствии с получаемой командной
информацией.
 В зависимости от вида используемой энергии и конструктивных особенностей исполнительные механизмы подразделяют на электрические, пневматические, гидравлические, мембранные, поршневые и комбинированные.
В зависимости от вида используемой энергии и конструктивных особенностей исполнительные механизмы подразделяют на электрические, пневматические, гидравлические, мембранные, поршневые и комбинированные.
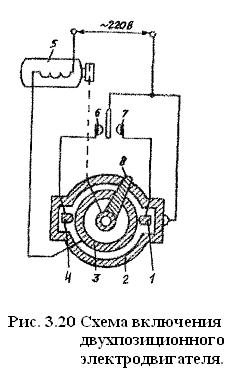
К наиболее распространенным электрическим исполнительным механизмам относятся двухпозиционные двигатели ДР (двух-позиционное регулирование). Они состоят из однофазного асинхронного электродвигателя и шестеренчатого редуктора, находящихся в общем литом корпусе. Выходной вал редуктора может обеспечить поворот регулирующего органа (например, секторной задвижки) на 180°. Частота вращения выходного вала зависит от сочетания шестерен в редукторе, которое выбирают при наладке системы.
Схема включения двухпозиционного электродвигателя показана на рис. 3.20. Когда значение регулируемой величины находится в заданных пределах, контакты б и 7 управляющего прибора (например, реле) разомкнуты. Пока движок 8 замыкает внутреннее контактное кольцо 5, к которому подключена обмотка статора, и наружное контактное кольцо 2, электродвигатель 5 и движок 8 вращаются (например, по часовой стрелке). Достигнув концевого выключателя, движок 8 соскакивает с наружного кольца и размыкает цепь. Двигатель останавливается. Изменение регулируемого параметра приводит к замыканию контакта 7. Двигатель включается, движок поворачивается и снова входит в контакт с наружным кольцом, но уже с нижней его половиной. Регулирующий орган перемещается, пока движок 8 не дойдет до другого концевого выключателя 4. Теперь включение электродвигателя произойдет только при замыкании контакта 6, т. е. когда регулируемый параметр достигнет своего нижнего предела. Таким образом, выходной вал делает по пол-оборота и останавливается, а рабочий орган замыкает при этом то одно, то другое крайнее положение регулятора. Скорость выходного вала зависит от передаточного числа редуктора.
Значительному повышению общего технического уровня строительного производства способствует внедрение в практику автоматизации строительных и коммунальных машин микропроцессорной техники. Учитывая необычайно широкие возможности современной вычислительной техники доя автоматизации машин, в частности наличие компактных запоминающих устройств, обладающих большой емкостью и позволяющих хранить в них довольно сложные программы управления (что является основой микропроцессора), можно создать с помощью микропроцессорной техники машины с очень высоким уровнем автоматизации. Микропроцессорная техника придает системам автоматического управления новую технологическую, функциональную, эксплуатационную гибкость и универсальность, простоту программирования и перепрограммирования при изменении состава технологического оборудования и самого процесса, сравнительную дешевизну и надежность работы систем управления.
Основным направлением использования современной микропроцессорной техники в строительных и коммунальных машинах является оптимизация режимов работы машин по критериям минимального потребления топлива и наименьших механических нагрузок на основные узлы, а также автоматическое диагностирование работы машины в целом и тестирование отдельных ее элементов (двигатель, трансмиссия, гидросистема, система автоматики и др.). Автоматическое диагностирование и тестирование позволяют не только своевременно обнаруживать повреждения в системе и сокращать продолжительность аварийных простоев за счет быстрой и четкой информации о неисправных элементах, но и повышают надежность, работоспособность и долговечность машин.
Микропроцессоры используют также в устройствах, обеспечивающих безопасность и облегчающих работу операторов машин. Например, их эффективно применяют в автоматических ограничителях грузоподъемности строительных кранов.
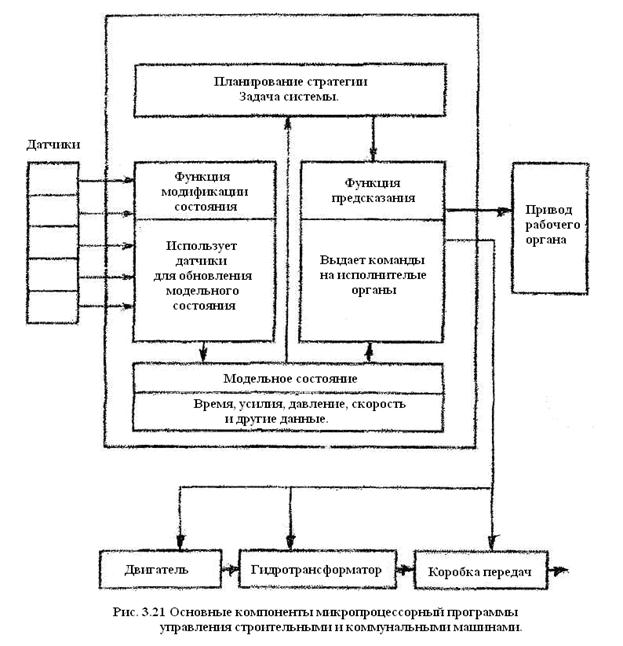
В настоящее время идет подготовка к массовому использованию в строительных и коммунальных машинах микропроцессоров для управления двигателями внутреннего сгорания, трансмиссией и приводом рабочих органов. Центральное звено такой микропроцессорной системы (рис.3.21 ) — модель реально протекающего процесса. Она включает три компонента: модельное состояние, описывающее реальный процесс во времени; функцию модификации состояний, описываемых по сигналам от датчиков, и функцию предсказания определенного модельного состояния, на основании чего и формируется набор машинных команд. Использование в строительных и коммунальных машинах микропроцессорной техники в сравнении с традиционной дает ряд существенных преимуществ: простота перестройки системы с пульта управления за счет изменения программы при замене технологического оборудования и изменения условий производства (схемные решения заменяются программными); широкая информация о технологическом процессе, контроле и учете горюче-смазочных материалов; оптимизация технологических процессов в целях уменьшения расхода сырья, топлива, энергии и др.; формирование и регистрация объективной технико-экономической информации (учет производительности, простоев, расхода топлива и др.); высокая надежность и резкое сокращение нестандартного оборудования.
3.4 Агрегатированный комплекс аппаратуры (АКА) для строительных машин.
Применение автоматизированных машин в строительстве не только повышает качество строительных работ и производительность труда, но и облегчает труд машинистов, улучшает условия и куль-гуру труда, обеспечивает безопасность работы.
По своему назначению средства автоматизации можно разделить на группы регулирования, управления, защиты и контроля. Для дорожных машин главным направлением является автоматизация управления рабочими органами, хотя в каждой системе применяются различные комбинации ее элементов. В отрасли строительного и дорожного машиностроения разработан ряд агрегатированных комплексов аппаратуры (АКА), в которых системы регулирования и управления различными машинами и установками составляют из минимального набора унифицированных приборов, что обеспечивает высокую серийность их производства и надежность в работе.
К таким унифицированным системам относят: «АКА-Дормаш» — для автоматизации саморегулирования рабочих органов и элементов управления дорожно-строительными машинами; «АКА-Бетон» — для автоматизации взвешивания материалов и контроля за работой асфальто- и бетоносмесительных установок всех типов и назначений; «АКА-Кран» - для автоматизации контроля безопасности работы различных крапов и погрузчиков, ограничения их грузоподъемности, а также осуществления их дистанционного и автоматического управления. Структурная схема аппаратуры комплекта «АКА-Дормаш» обеспечивает построение систем для частичной и комплексной автоматизации регулирования, управления и контроля рабочими органами различных машин при выполнении работ по заданным отметкам, уклону и направлению движения. Как видно из схемы, объектами автоматизации являются: I - «Стабилослой» для различных укладочных машин; II — «Профиль» для автогрейдеров и профилировщиков; Ш — «Автоплан» для бульдозеров; IV — «Стабилоплан» для скреперов, канавокопателей, дреноукладчиков и др.
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 873; Нарушение авторских прав?; Мы поможем в написании вашей работы!