КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Линеаризация уравнений статики
|
|
|
|
В большинстве случаев для реальных звеньев автоматической системы связь между значениями выходной и входной координатами является нелинейной. Поэтому и уравнения статики, и уравнения динамики системы в целом, как правило, получаются нелинейными. Нелинейные дифференциальные уравнения вносят значительные затруднения в решение задач, особенно в тех случаях, когда они имеют высокий порядок. Поэтому очень часто стараются заменить в первом приближении нелинейное дифференциальное уравнение или уравнение статики линейными, анализ которых выполняется значительно проще.
Такая замена нелинейных зависимостей линейными называется линеаризацией. Полученные в результате линеаризации приближенные уравнения могут быть положены в основу приближенного исследования достаточно широкого класса систем автоматического регулирования непрерывного действия. Выводы, получаемые в линейной теории автоматического регулирования, основанные на исследовании линеаризованных систем, имеют большое практическое значение.
Рассмотрим физическую сущность метода линеаризации на примере АСР температуры нагревательной печи. Для измерения температуры в печи используется платинородий-платиновый термоэлектрический термометр, статическая характеристика которого приведена на рисунке 2.6.
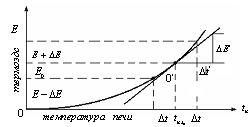
Рисунок 2.6– К вопросу линеаризации нелинейных характеристик.
При отклонении регулируемой температуры от заданного значения  , называемого также номинальным, (например, в результате повышения теплоотдачи печи во время ее загрузки деталями, подлежащими нагреву) произойдет изменение тэдс на величину ∆Е.
, называемого также номинальным, (например, в результате повышения теплоотдачи печи во время ее загрузки деталями, подлежащими нагреву) произойдет изменение тэдс на величину ∆Е.
Однако в замкнутой АСР регулятор будет воздействовать на источник тепла таким образом, чтобы температура в печи приняла заданное значение. Поэтому отклонения температуры, а следовательно, и величины тэдс от номинальных значений будут незначительны.
|
|
|
Учитывая малость отклонений, можно в окрестностях точки  , соответствующей равновесному состоянию, заменить участок кривой
, соответствующей равновесному состоянию, заменить участок кривой  прямой, касательной к этой кривой в точке .
прямой, касательной к этой кривой в точке .
При такой замене получаем линейную зависимость между тэдс и температурой около равновесного состояния:
 (2.10)
(2.10)
В уравнении (2.10) коэффициент  может быть определен из графика (рис. 2.6).
может быть определен из графика (рис. 2.6).
 (2.11)
(2.11)
Если перенесем начало координат в точку равновесного состояния, получим более простую зависимость.
 (2.12)
(2.12)
где  .
.
Если зависимость между выходной и входной координатами задана аналитически, то линеаризация осуществляется с помощью разложения функции в ряд Тейлора в окрестности точки, характеризующей состояние равновесия. В этом разложении оставляют только отклонения первой степени.
Допустим, что уравнение нелинейного звена имеет вид:
 (2.13)
(2.13)
Запишем разложение этой функции в ряд Тейлора для точки равновесного состояния А  :
:
 (2.14)
(2.14)
Отбрасывая из ряда члены высших порядков малости, т.е. содержащие отклонения координаты  в степенях выше первой, получим:
в степенях выше первой, получим:
 (2.15)
(2.15)
Учитывая, что  ,
,  ,
,  , получим:
, получим:
 (2.16)
(2.16)
Выражение (2.16) и представляет собой линеаризованную функцию  , представленную в отклонениях от равновесного состояния. Производная
, представленную в отклонениях от равновесного состояния. Производная  этой функции в точке равновесного состояния равна тангенсу угла наклона линеаризованного участка в окрестности точки равновесного состояния.
этой функции в точке равновесного состояния равна тангенсу угла наклона линеаризованного участка в окрестности точки равновесного состояния.
Рассмотрим конкретный пример. Уравнение статики имеет вид:
 (2.17)
(2.17)
Необходимо линеаризовать эту зависимость в окрестности точки равновесного состояния  .
.
Искомое уравнение должно иметь вид:
(2.18)
,  ,
,  (2.19)
(2.19)
Определяем
 (2.20)
(2.20)
Определяем
 (2.21)
(2.21)
Искомое уравнение имеет вид:
 (2.22)
(2.22)
Или
 (2.22)
(2.22)
Следует отметить, что статические характеристики экстремальных и релейных звеньев линеаризации не поддаются. Поэтому такие характеристики называют существенно нелинейными.
|
|
|
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 1374; Нарушение авторских прав?; Мы поможем в написании вашей работы!