КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Инженерная геодезия 8 страница
|
|
|
|


 А
А
 С0
С0
f
б
 |
 А
А







 γ С1
γ С1








 В β
В β
 S
S
 f С0
f С0

 в
в










 В β S С1
В β S С1
γ



 С0
С0
f
Рис. 61. Принцип работы компенсатора
При горизонтальном положении визирной оси трубы по средней нити сетки производят правильный отсчет А, соответствующий горизонту инструмента (рис. 61). При наклоне зрительной трубы на угол γ горизонтальный луч, соответствующий отсчету А, смещается вверх или вниз относительно средней нити сетки на величину С0С1=∆=f∙sinγ≈f∙γ/ρ". Для того, чтобы отсчет А по средней нити сетки не изменялся, нужно либо изменить положение сетки нитей из положения С0 в С1 (механический компенсатор, рис. 61, б), либо изменить направление горизонтального луча, соответствующего отсчету А так, чтобы этот луч снова попал на среднюю нить сетки (оптико-механический компенсатор, рис. 61, в).
Смещение сетки нитей или изменение положения визирного луча осуществляется с помощью расположенного в точке В специального устройства – компенсатора наклона зрительной трубы на величину ∆=S∙sinβ. Отсюда следует основное уравнение компенсации
f∙sinγ=S∙sinβ.
Существует еще одна группа компенсаторов – жидкостные, основанные на свойстве поверхности жидкости под действием силы тяжести устанавливаться нормально к отвесной линии. В геодезических приборах жидкостные компенсаторы применяют редко. Они действуют также по схеме оптико-механических компенсаторов. Угол β отклонения луча и местоположение точки В рассчитываются таким образом, чтобы удовлетворялось основное уравнение компенсации. Отношение f/S=β/γ=n называется угловым увеличением компенсатора. Для того, чтобы геометрические размеры компенсатора были невелики, точку В стремятся расположить внутри зрительной трубы (n≥1).
Компенсаторы наклона содержат подвижный элемент, находящийся в определенном положении под действием силы тяжести, неподвижный оптический элемент (например, отклоняющую призму) и демпфирующее устройство (демпфер) воздушного или магнитного типа. Жидкостные демпферы не используются в нивелирах с компенсатором.
В геодезии наиболее широко применяются оптико-механические компенсаторы маятникового типа, которые, в свою очередь, подразделяются на линзовые, зеркальные, призменные. В мире выпущено более 70 типов компенсаторов, поэтому вышеприведенное разделение на виды весьма условно.
Все компенсаторы можно сгруппировать в соответствии с их расположением в нивелире:
-с компенсатором перед объективом – НСМ-2А (СССР);
-с подвижным объективом или сеткой нитей – Сальмойраш 5172 и 5173 (Италия);
-с компенсатором между основным и фокусирующим компонентами телеобъектива – Ni-002 (ГДР), Ni-А31 (ВНР), Никон (Япония) и др.;
-с компенсатором между фокусирующей линзой и сеткой нитей – Ni-025, Ni-007 (ГДР), Ni-В3 (ВНР), НС-3 (СССР) и др.;
-с компенсатором, служащим фокусирующим компонентом – Н-10КЛ.
Механическим компенсатором является качающаяся сетка на трех металлических нитях, имеющая длину, равную f (f=S, n=1). Под действием силы тяжести перекрестие сетки нитей занимает такое положение, что визирная ось системы отвесна.
Наиболее часто используются оптико-механические компенсаторы в виде свободно подвешенных зеркал, призм, линз. Если зеркало подвесить на маятнике так, чтобы оно составляло с горизонтальной плоскостью всегда одинаковый угол, то его можно использовать в качестве компенсатора, у которого f=2S, следовательно, n=2.
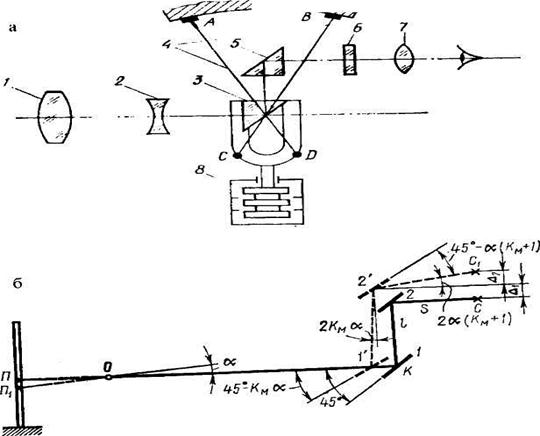
Рис. 62. Принципиальная схема (а) и схема действия (б)
призменного компенсатора:
1 - объектив; 2 - фокусирующая линза; 3 - призма-компенсатор;
4 - бериллиевые нити; 5 - призма АР-90°; 6 - сетка нитей; 7 - окуляр;
8 - воздушный демпфер
Эту схему используют в точных нивелирах типа Н-3К. Здесь Км(n) < -1. При наклоне зрительной трубы на угол g перекрестие сетки нитей С смещается в положение С1. Компенсатор сдвигает изображение правильного отсчета П в новое положение перекрестия сетки нитей на значение
D = D1 + D2
Полагают, что, из-за малости угла наклона g, изменение расстояний l и S мало, и записывают уравнение компенсации в виде:
¦’g =2 l KMg + 2Sa(KM+1)
или
KM = ¦-2S/2(l+S)
Задаваясь значениями ¦, S и l, вычисляют геометрические размеры подвески компенсатора. Для нивелира Н-ЗК значения Км = 2,62÷3,143. При сборке прибора изменяют значение S до тех пор, пока погрешность компенсации не будет минимальна.
На этом принципе разработана схема нивелира 3Н-3КЛ (рис. 63).
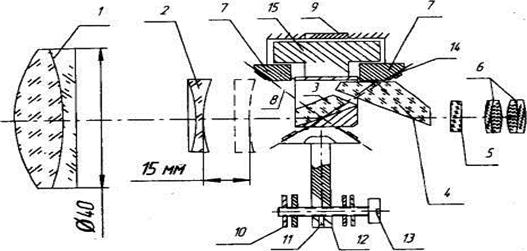
Рис. 63. Принципиальная оптико-механическая схема нивелира 3Н-3КЛ:
1 - объектив; 2 - фокусирующая линза; 3 - призма-компенсатор АР-60";4 - призма БкУ-60°; 5 - сетка нитей; 6 - окуляр; 7 — подвижные опоры;8 - бериллиевые нити; 9,15 – магнитоиндукционные демпфер (поз. 15 одновременно выполняет роль балансира); 10 - грузики; 11 - стопорный винт; 12 - маятник; 13 - винт; 14 – прокладка
В настоящее время наряду с оптическими нивелирами выпускают цифровые и лазерные нивелиры, которые нашли широкое применение при решении инженерно-геодезических задач в народном хозяйстве. Применение этих приборов в несколько раз повышает производительность труда.
Существуют лазерные нивелиры и теодолиты, задающие световую плоскость и линию (рис. 65). Лазерные нивелиры делятся на приборы для выполнения внутренних работ и приборы для выполнения наружных работ.
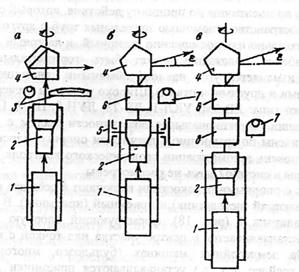
Рис. 64. Структурные схемы передатчиков
На рисунке: 1 – лазер, 2 – коллиматор, 4 – блок развертки луча в плоскость (например, в виде вращающейся пентапризмы). Лазерный луч может устанавливаться в строго вертикальное положение точным цилиндрическим уровнем 3, круглым уровнем 7 и шарниром 5, круглым уровнем и компенсатором 8. В системах с наклонной опорной плоскостью (угол наклона ε переменный) между коллиматором или компенсатором и блоком развертки устанавливается блок 6 формирования угла наклона. Лазер и коллиматор могут располагаться горизонтально, но тогда необходим дополнительный оптический элемент, изменяющий направление лазерного луча с горизонтального на вертикальное.
Для формирования горизонтальной опорной плоскости необходимо направить идущий строго вертикально лазерный луч на вращающуюся вокруг вертикальной оси, совпадающей с лучом, призму (прямоугольную или пентапризму), изменяющую его направление на 90°.
Способы формирования опорной плоскости с переменным углом наклона ε (или уклоном i) можно разделить на две группы: оптико-механические и электрооптические. Одним из наиболее распространенных способов задания наклонной плоскости является способ, использующий свойство вращающейся прямоугольной (редко) призмы или пентапризмы, т.е. такой призмы, которая может изменять вертикальное направление входящего луча на горизонтальное, разворачивать луч, отклоненный от вертикали на угол ε, в плоскость, наклоненную к горизонту на тот же угол ε (для пентапризмы) или 2ε (для прямоугольной призмы). Если изменять угол отклонения луча от вертикали, то в пространстве будет изменяться угол наклона плоскости.
Для придания лазерному лучу определенного угла отклонения от вертикали, т.е. для управления этим лучом, имеется ряд устройств.
а) б)
б) 
в)
Рис. 65. Нивелиры: а) цифровой нивелир DINI; б) FL -250 VA - N –автоматический мультифункциональный ротационный лазерный нивелир для измерений как внутри помещений – так и снаружи;
в) построитель плоскости FL 40-Pocket II Лазерный нивелир с широкой разверткой лазерных лучей. Имеет новую систему призм и лазерный диод, подходит для строительно-ремонтных работ внутри помещений. Прибор имеет отсоединяемое многофункциональное крепление, позволяющее закреплять его на бетонные стены, деревянные балки и
металлические поверхности.
9.3. Поверки нивелиров с цилиндрическим уровнем.
Рассмотрим поверки нивелиров с цилиндрическим уровнем.
 О
О
u u



 m
m



 V V
V V
 m u'
m u'
 |
О u'
Рис. 66. Схема основных осей нивелира с цилиндрическим уровнем
На рисунке 66:
ОО – основная ось вращения прибора; uu – ось цилиндрического уровня; VV – визирная ось зрительной трубы; u'u' – ось круглого уровня, mm – средняя горизонтальная нить сетки.
Поверки выполняют после приведения прибора в рабочее положение и поверяют выполнение следующих условий:
1) Ось круглого уровня должна быть параллельна основной оси вращения нивелира. Уровень располагают между двумя подъемными винтами, вращая их одновременно в разные стороны, приводят пузырек круглого уровня на середину. Затем поворачивают трубу на 180º и наблюдают за перемещением пузырька. Если пузырек круглого уровня остался в нульпункте, условие поверки выполнено, в противном случае производят юстировку. При помощи исправительных винтов круглого уровня перемещают пузырек по направлению к нульпункту на половину схода. Окончательно возвращают пузырек на середину подъемными винтами. После исправления поверку повторяют.
2) Средняя горизонтальная нить сетки нитей должна быть перпендикулярна оси вращения инструмента. Наводят трубу на рейку, расположенную не менее чем в 30 метрах от нивелира. Работают наводящим винтом трубы, перемещая изображение рейки сначала в правое положение поля зрения трубы, затем в левое, каждый раз при этом берут отсчет по рейке. В случае совпадения отсчетов аКП и аКЛ условие поверки выполнено, в противном случае нужно развернуть сетку нитей на величину  .
.
3) Ось цилиндрического уровня должна быть параллельна визирной оси зрительной трубы. Эта поверка считается основной поверкой нивелира. Один из способов ее выполнения – нивелирование «вперед» двух точек (рис. 67).
 | |||||||
| |||||||
| |||||||
 | |||||||




 х
х






 х
х







 а
а


 в i2
в i2
 i1 в0 а0
i1 в0 а0



 А В А В
А В А В
 |
Рис. 67. Схема выполнения основной поверки нивелира способом
нивелирования «вперед» двух точек
 h = i1 – в0 = i1 – (в – х) х =
h = i1 – в0 = i1 – (в – х) х =  ≤ 4мм
≤ 4мм
h = а0 – i2 = (а – х) – i2
hср. = - безошибочно. То же получается при нивелировании «из середины» при равных плечах.
- безошибочно. То же получается при нивелировании «из середины» при равных плечах.
Если х > 4мм, необходимо произвести юстировку:
1. Вычисляют верный отсчет по рейке а0 = а – х
2. Элевационным винтом наклоняют зрительную трубу и устанавливают на рейке отсчет а0. При этом пузырек цилиндрического уровня сместится из середины.
3. Исправительными винтами цилиндрического уровня пузырек уровня возвращают на середину.
4. Повторяют поверку.
10. Продольное нивелирование трассы
Трасса – это ось линейного сооружения типа: дороги, трубопроводы, линейные ускорители частиц, ЛЭП и другие (рис. 68).
Трассирование – комплекс работ для получения оптимального варианта трассы по отношению к ландшафту местности, рельефу, в экономическом отношении. Разделяют камеральное и полевое трассирование. Камеральное трассирование заключается в предварительном выборе оптимального варианта трассы с использованием карт мелкого, а затем более крупного масштабов. Выполняется оно способами: попыток, построения линии заданного уклона, по стереомоделям местности и автоматизированным методом.
Полевое трассирование выполняют или без предварительного выбора трассы на карте или выносят в натуру выбранный на карте вариант трассы. Все работы при этом разделяются на полевые и камеральные.
10.1. Полевые работы.
1) Рекогносцировка – осмотр местности и закрепление главных точек трассы начала трассы (НТ), конца трассы (КТ), створных точек (СТ), вершин углов поворота трассы (ВУ) (рис. 68) деревянными или бетонными столбами высотой около одного метра.
На столбах масляной краской подписывают названия и номера точек.
2) Измерение углов поворота трассы – угла между предыдущим и последующим направлением трассы. Теодолитом измеряют правые по ходу горизонтальные углы и вычисляют углы поворота трассы. Если трасса поворачивает вправо, то φ1 = 180º- β1, угол поворота трассы влево вычисляют следующим образом φ2 = β2 – 180º.
3) Разбивка трассы: расчистка и закрепление главных точек кривых, пикетов, плюсовых точек, поперечников. После вычисления углов поворота трассы выбирают из «Таблиц для разбивки круговых кривых» или вычисляют по формулам элементы кривых: тангенс (касательная к кривой, Т), биссектрису (Б), длину кривой (К), домер (Д) (рис. 69).

 ВУ № 1
ВУ № 1


 φ1 КТ
φ1 КТ


 СТ β1 СТ
СТ β1 СТ


 НТ ВУ № 2 φ2
НТ ВУ № 2 φ2
 |
β2
Рис. 68. Главные точки трассы
 Х
Х
ВУ+48,65

 φ
φ


 ПК2'
ПК2'


 Т уПК2 Д
Т уПК2 Д
 ПК2
ПК2
хПК2 СК


 КК
КК
 НК
НК
ПК1 R
R β
 R
R
| |||
| |||
НТ КТ
О
Рис. 69. Главные элементы и точки горизонтальной круговой кривой,
вынесение пикета с тангенса на кривую
R – радиус кривой; Т = R·tg(φ/2); К =  ;
;
Б= ; Д = 2Т – К.
; Д = 2Т – К.
β =  ; НК – ПК2 = НК – ПК2', где ρ=206265"≈57,3º.
; НК – ПК2 = НК – ПК2', где ρ=206265"≈57,3º.
Вычисляют пикетажное значение, то есть расстояние от предыдущего пикета, главных точек кривых по формулам:
ВУ Контроль: ВУ
-Т +Т
НК ……
+К -Д
КК КК
КК
По пикетажным значениям находят на местности главные точки кривых и закрепляют их деревянными колышками.
Пикеты разбивают по прямым участкам трассы при помощи ленты или рулетки через каждые 100 метров по направлению, заданному визирным лучом теодолита. Если пикет попал на тангенс, по новому направлению откладывают домер первой кривой и, считая пикетаж полученной точки равным пикетажу вершины угла, дальнейшую разбивку трассы продолжают от нее. Кроме того, этот пикет нужно вынести на кривую (рис. 69). С этой целью вычисляют центральный угол β и прямоугольные координаты выносимого пикета. Так, для пикета 2 на рисунке 69 хПК2 = R∙sinβ; уПК2 = R – R∙cosβ = 2R∙sin2β/2.
Пикеты закрепляют деревянными колышками, которые забивают вровень с землей, окапывают канавкой в радиусе одного метра и забивают сторожок (деревянный колышек длиной 60см), на котором подписывают номер пикета.
На трассе закрепляют плюсовые точки – точки пересечения с характерными элементами ситуации и рельефа, определяют их пикетаж от предыдущего пикета. На косогорах или в местах неравномерного уклона трассы разбивают поперечники: закрепляют на трассе осевую точку поперечника, строят при помощи теодолита прямой угол к трассе вправо и влево от нее, то есть левое и правое плечи поперечника, на которых закрепляют плюсовые точки в местах изменения рельефа. Пикетаж этих точек определяют от осевой точки поперечника.
4) Горизонтальная съемка полосы местности вдоль трассы (от 20 метров и больше) способами прямоугольных координат и линейных засечек. При необходимости съемки рельефа выполняют тахеометрическую съемку, используя в качестве точек съемочного обоснования главные точки трассы, которые должны быть привязаны к пунктам государственной или местной геодезических сетей.
Параллельно с разбивкой трассы и съемкой местности ведут пикетажный журнал, куда заносят результаты разбивки и ведут абрис съемки.
5) Нивелирование трассы. Выполняют методом геометрического нивелирования способом «из середины». Нивелирование технической точности, при котором применяются технические нивелиры, допустимая максимальная длина плеч при хорошей видимости 150 метров, при плохой 100 метров. Километровые пикеты, реперы нивелируют как связующие точки, а плюсовые точки и точки поперечников – как промежуточные, только по черной стороне рейки.
По окончании полевых работ получают следующие документы: пикетажный журнал и журналы нивелирования трассы.
|
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 601; Нарушение авторских прав?; Мы поможем в написании вашей работы!