КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Усилия в зацеплении
|
|
|
|
Выше рассмотрены геометрические параметры и кинематические особенности взаимодействия зубьев колес. При этом полагали, что влияние деформации зубьев и тел колес на рассматриваемые параметры не существенно.
Для обоснованного назначения размеров колес и оценки их работоспособности необходимо знать меру их механического взаимодействия — напряжения и деформации и их предельные оценки (критерии работоспособности). Между тем достаточно точный расчет напряжений и деформаций в точках зубчатого колеса связан со значительными математическими трудностями и может быть реализован методами теории упругости. В связи с этим на этапе проектирования выполняют приближенный расчет напряжений и деформаций в зубьях колес в два приема: 1) находят усилия в зацеплении — главный вектор действующих контактных давлений; 2) определяют напряжения в наиболее опасных точках колеса под действием этих сил и оценивают прочность колеса.
При определении усилий в зацеплении используют методы теоретической механики, силами трения пренебрегают ввиду их малости.
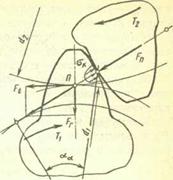
Рис. 20.23. Зацепление цилиндрических колес прямозубых
Нормальная сила между парой контактирующих зубьев (рис. 20.23)

Где  контактное напряжение;
контактное напряжение; площадь поверхности контакта.
площадь поверхности контакта.
Эта сила будет направлена по линии зацепления (как по общей нормали к рабочим поверхностям зубьев) так, чтобы момент этого усилия относительно оси колеса уравновешивал бы действующий вращающий момент  .
.
Сила  является также исходной для расчета валов и поддерживающих валы опор. В этом случае, принимая для упрощения, что контакт зубьев происходит в полюсе зацепления П (его положение известно заранее), силу Fn раскладывают на составляющие.
является также исходной для расчета валов и поддерживающих валы опор. В этом случае, принимая для упрощения, что контакт зубьев происходит в полюсе зацепления П (его положение известно заранее), силу Fn раскладывают на составляющие.
Прямозубая цилиндрическая передача. Силу Fn раскладывают на окружную Ft и радиальную Fr составляющие. Для упрощения расчетов окружную силу в полюсе определяют по отношению к делительной окружности и обозначают Ftw:

 (20.15)
(20.15)
где  - угол зацепления; - вращающий момент на шестерне;
- угол зацепления; - вращающий момент на шестерне; - диаметр делительной окружности шестерни.
- диаметр делительной окружности шестерни.
Направление действия окружной силы для шестерни противоположно направлению ее вращения, а для колеса совпадает с направлением его вращения.
Векторы радиальных усилий у колес с внешним зацеплением направлены к центру, а у колес с внутренним зацеплением — от центра зубчатого колеса.
Косозубая и шевронная цилиндрические передачи. Усилие Fn в зацеплении передачи раскладывают на окружную Fv ,осевую Fa и радиальную Fr составляющие (рис. 20.24):
 ; (20.16)
; (20.16)

здесь - угол зацепления косозубой передачи в нормальном сечении,;  -угол наклона линии зуба.
-угол наклона линии зуба.
Осевая сила F a дополнительно нагружающая опоры валов, является недостатком косозубых передач. Этот недостаток устраняется в шевронной передаче, которую можно рассматривать как сдвоенные косозубые передачи с противоположным направлением зубьев (см. рис. 20.14).
Для ограничения осевой нагрузки на подшипники рекомендуют принимать для косозубых колес  <20°, а для шевронных колес < 40°.
<20°, а для шевронных колес < 40°.
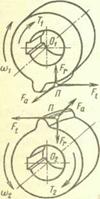
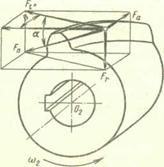
Рис. 20.24. Зацепление косозубых колес
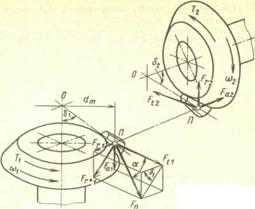
Рис. 20.25. Зацепление конических колес
Направление окружной и радиальной сил такое же, как и в прямозубой передаче. Осевая сила параллельна оси колеса, а направление вектора зависит от направления вращения колеса и направления линии зуба.
Прямозубая коническая передача. В зацеплении конической передачи полное усилие Fn также раскладывают на три составляющие (рис. 20.25), рассчитываемые по среднему диаметру dm = mtmz ( здесь mm t -окружной модуль в среднем нормальном сечении зуба):
 (20.17)
(20.17)
Обратим внимание, что направление сил на шестерне и колесе противоположно, а силы Fa1 = Fr2 и Fr1 = Fa2.
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 3125; Нарушение авторских прав?; Мы поможем в написании вашей работы!