КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Электрические датчики
|
|
|
|
В современных автоматических системах используется множество разнообразных устройств, служащих для получения информации о регулируемых величинах объектов.
Датчиком называется первичный элемент автоматической системы, реагирующий на изменение физической величины, которая характеризует процесс, и преобразующий эту величину в форму, удобную для использования последующими элементами системы. Статической характеристикой датчика является зависимость изменения выходной величины х2 от изменения входной х1 т. е.  . Коэффициент усиления датчика определяется крутизной статической характеристики
. Коэффициент усиления датчика определяется крутизной статической характеристики  и обычно называется чувствительностью датчика S.
и обычно называется чувствительностью датчика S.
Так как большинство регуляторов предназначено для управления неэлектрическими величинами, то задача датчика обычно состоит не только в том, чтобы измерять данную величину (например, давление или уровень), но и преобразовывать ее изменения в электрическую форму. Это может быть любая характеристика электрической цепи: активное сопротивление, индуктивность, емкость, напряжение, сила тока и т. п.
Электрические датчики можно классифицировать по тем величинам, которые они должны измерять (датчики давления, датчики уровня и т. п.), или по тем электрическим характеристикам, в которые преобразуются измеряемыё величины (датчики активного сопротивления, датчики индуктивности и т. п.). Более рациональной является классификация по второму признаку, так как, например, два датчика индуктивности, служащие для измерения различных величин, сходны между собой по конструкции и имеют близкие эксплуатационные характеристики. В то же время емкостный и индуктивный датчики, предназначенные для измерения одной и той же величины, очень отличаются друг от друга по конструкции и по характеристикам.
Многие неэлектрические величины с помощью первичного преобразователя предварительно преобразуются в механическое перемещение, поэтому электрические датчики исполняются в виде устройств, преобразующих это перемещение в ту или иную электрическую величину. Различают следующие виды датчиков: активного сопротивления, индуктивности, емкости, напряжения, тока, фазы, частоты, числа импульсов и длительности импульса.
Иногда необходимо несколько раз преобразовывать измеряемый параметр, например из механической величины сначала в тепловую, световую и т. п., а затем уже в электрическую.
Датчики активного сопротивления. Основными типами датчиков активного сопротивления являются потенциометрические, угольные датчики, тензометры и термометры сопротивления.
Потенциометрические датчики обычно применяют для измерения перемещений. Их основными достоинствами являются простота конструкции и возможность работы без последующего усиления сигнала. К основным недостаткам относятся наличие скользящего электрического контакта, относительно большие перемещения движка и значительные усилия для осуществления этих перемещений. Простой реостат, изменяющий ток в электрической цепи при смещении движка, почти не используется в автоматике ввиду значительной нелинейности его характеристики.
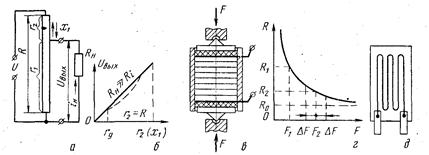
Рис.2.1. Датчики активного сопротивления и их характеристики
Обычно сопротивления включаются по схеме потенциометра (рис. 2.1, а). В этом случае характеристика датчика может быть сделана приблизительно линейной за счет правильного выбора режима работы потенциометра.
Статической характеристикой потенциометрического датчика называется зависимость напряжения Uвых на сопротивлении нагрузки Rн от перемещения движка потенциометра, т. е.  . При равномерной намотке потенциометра величина сопротивления r2 пропорциональна перемещению движка х1, т. е.
. При равномерной намотке потенциометра величина сопротивления r2 пропорциональна перемещению движка х1, т. е.  . В том случае, когда сопротивление нагрузки намного больше внутреннего сопротивления потенциометра
. В том случае, когда сопротивление нагрузки намного больше внутреннего сопротивления потенциометра  , статическая характеристика потенциометра изобразится прямой линией (рис. 3, б). Пунктиром показан случай, когда Rн сравнимо по величине с внутренним сопротивлением датчика. Поэтому при работе с потенциометрическим датчиком необходимо оценивать погрешность измерений, которая возможна ввиду нелинейности характеристик, или ограничивать рабочий участок интервалом характеристики. 0 - rд, имеющим малую нелинейность.
, статическая характеристика потенциометра изобразится прямой линией (рис. 3, б). Пунктиром показан случай, когда Rн сравнимо по величине с внутренним сопротивлением датчика. Поэтому при работе с потенциометрическим датчиком необходимо оценивать погрешность измерений, которая возможна ввиду нелинейности характеристик, или ограничивать рабочий участок интервалом характеристики. 0 - rд, имеющим малую нелинейность.
Погрешность практически равна нулю, когда напряжение с потенциометра подается, например, на вход электронного усилителя. В этом случае Rн = Ri и выходное напряжение

где  - отношение величины перемещения движка х1 к длине намотки потенциометра l; R - общее сопротивление потенциометра.
- отношение величины перемещения движка х1 к длине намотки потенциометра l; R - общее сопротивление потенциометра.
Когда Rн сравнимо с внутренним сопротивлением датчика R i, то

Величина R/RH определяет погрешность измерения и преобразования перемещения, которая увеличивается с уменьшением сопротивления нагрузки. Относительная погрешность работы датчика определяется отношением

Чувствительность датчика при наличии нагрузки определяется производной  и зависит от величины
и зависит от величины  . При малых перемещениях или при очень большом сопротивлении нагрузки чувствительность
. При малых перемещениях или при очень большом сопротивлении нагрузки чувствительность  , т. е. определяется напряжением питания.
, т. е. определяется напряжением питания.
Для получения статической характеристики, реагирующей на знак входного сигнала, используются схемы потенциометрических датчиков. При этом выходное напряжение снимается сдвижка и средней точки потенциометра или сопротивление нагрузки включается в диагональ мостовой схемы, образованной двумя потенциометрическими датчиками. Динамические свойства датчика определяются видом нагрузки. При нагрузке, являющейся активным сопротивлением, он представляет собой безынерционное звено.
Угольные датчики применяют в основном для измерения больших усилий и давлений. Устройство простейшего угольного датчика показано на рис. 2.1, в, а на рис. 2.1, г приведена его статическая характеристика. Угольный датчик представляет собой столбик из графитовых дисков, имеющий на концах контактные диски и упорные приспособления, которые воспринимают измеряемые усилия. Сопротивление R такого столбика складывается из собственного сопротивления графитовых дисков R0 и переходного контактного сопротивления поверхностей их соприкосновения.
Из-за неровностей поверхностей графитовых дисков они соприкасаются в отдельных точках. Если угольный датчик подвергнуть сжатию, то площадь контакта графитовых дисков увеличивается, а переходное сопротивление уменьшается. Зависимость сопротивления R угольного датчика от приложенного усилия F, представляющая собой статическую характеристику, выражается формулой:

где k - постоянный коэффициент. Следовательно, угольные датчики относятся к нелинейным звеньям.
Существенными недостатками датчиком являются нелинейность характеристик, нестабильность сопротивления и значительный (до 5%) гистерезис, т. е. различие между сопротивлением для одних и тех же величин усилий при сжатии или при растяжении столбика.
Наибольшая нелинейность характеристики угольного датчика наблюдается при незначительных измеряемых усилиях. Для смещения рабочей точки датчика на более линейный участок характеристики его подвергают предварительному сжатию усилием F1 или F2 (см. рис. 2.1, г). Для линеаризации характеристики в процессе работы выбирают небольшой участок  , например F2 ± , а для повышения чувствительности датчик изготовляют в дифференциальном исполнении. В этом случае одна половина датчика испытывает сжатие, а другая растяжение, и они включаются в разные плечи мостовой схемы, принцип работы которой описан ниже. Область применения угольных датчиков ограничена измерением больших. усилий и давлений, не требующим высокой точности.
, например F2 ± , а для повышения чувствительности датчик изготовляют в дифференциальном исполнении. В этом случае одна половина датчика испытывает сжатие, а другая растяжение, и они включаются в разные плечи мостовой схемы, принцип работы которой описан ниже. Область применения угольных датчиков ограничена измерением больших. усилий и давлений, не требующим высокой точности.
Тензометры или тензометрические датчики изготовляются либо из тонкой проволоки, либо из тензолита. В обычном исполнении тензометрический датчик представляет собой тонкую проволоку, сложенную в виде решетки и обклеенную с двух сторон тонкой бумагой (рис. 2.1, д). Такой элемент приклеивается прочным клеем к детали и служит для измерения ее деформации. Способ измерения основан на изменении сопротивления проволоки при ее растяжении или сжатии. Тензолитовые датчики выполняются в виде стерженьков диаметром до 1 мм, которые также наклеиваются на деталь и изменяют свое сопротивление при ее деформации.
Тензодатчики имеют малую величину относительного изменения сопротивления  (не более 1%), что требует применения очень чувствительных измерительных схем. Чувствительностью, или коэффициентом усиления тензодатчиков, называют отношение величины относительного изменения его сопротивления , являющейся его выходной величиной, к величине относительной деформации
(не более 1%), что требует применения очень чувствительных измерительных схем. Чувствительностью, или коэффициентом усиления тензодатчиков, называют отношение величины относительного изменения его сопротивления , являющейся его выходной величиной, к величине относительной деформации  , которую можно считать входной величиной, т. е.
, которую можно считать входной величиной, т. е.

Статическая характеристика тензометрических датчиков изображается в виде прямой линии. Это означает, что их чувствительность практически постоянна. Тензодатчики, изготовленные из константана, обладают небольшой чувствительностью, но зато имеют малый температурный коэффициент сопротивления. С целью повышения чувствительности для изготовления тензодатчиков используют сплавы типа элинвар, обладающие относительно высоким температурным коэффициентом сопротивления. Для еще большего повышения чувствительности в мостовую измерительную схему включают два или даже четыре одинаковых тензометрических датчика.
Термометры сопротивления получили широкое распространение для измерения температур различных сред в пределах от -200 до +650 °С. Метод измерения такими термометрами основан на свойстве некоторых материалов менять свое электрическое сопротивление R при изменении температуры. Зависимость электрического сопротивления от температуры для металлов выражается формулой

где  - постоянный коэффициент; - температурный коэффициент сопротивления; Т - температура, К.
- постоянный коэффициент; - температурный коэффициент сопротивления; Т - температура, К.
Зная сопротивление проводника при какой-то начальной температуре t0
можно определить сопротивление этого проводника при произвольной температуре t:

из соотношения

Разлагая его правую часть в ряд и ограничиваясь первыми двумя членами ряда, что справедливо для многих металлов, получим линейную зависимость, являющуюся статической характеристикой термометра сопротивления в виде:

Величина а характеризует наклон характеристики и, следовательно, определяет коэффициент усиления датчика. Для ряда металлов зависимость следует ограничивать третьим членом разложения в ряд:

где  - коэффициент пропорциональности.
- коэффициент пропорциональности.
Характеристика таких датчиков является нелинейной.
В последнее время в качестве термометров сопротивления получили применение термисторы, которые изготовляются из полупроводников, представляющих собой оксиды, сульфиды, карбиды металлов, обладающих большим отрицательным коэффициентом. Термисторы изготовляют путем прессования и обжига измельченных чистых материалов и покрывают защитным слоем эмали или лака, имеющих тот же коэффициент расширения.
Если термометр сопротивления поместить в среду с температурой t, то его температура будет изменяться по экспоненциальной кривой с постоянной времени Т0, которая зависит от параметров термометра: его объема; поверхности соприкосновения со средой; коэффициента теплопередачи и теплоемкости. Значение Т0 изменяется в широких пределах от долей секунды до десятков минут. Следовательно, термометр сопротивления является инерционным звеном с передаточной функцией  , где величина k определяется по формулам статических характеристик и в виде
, где величина k определяется по формулам статических характеристик и в виде  . Так как характеристика, выраженная формулой , линейна, то значение k для нее постоянно и равно
. Так как характеристика, выраженная формулой , линейна, то значение k для нее постоянно и равно  .
.
Датчики индуктивности. Принцип работы этих датчиков основан на изменении индуктивного сопротивления катушки со стальным сердечником. Датчики индуктивности обладают следующими достоинствами: простой конструкцией; надежностью в работе; не имеют скользящих контактов; могут непосредственно подключаться к показывающим приборам за счет относительно большой отдаваемой электрической мощности; могут работать на переменном токе промышленной частоты.

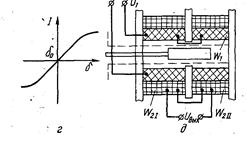
Рис.2.2. Датчики индуктивности
Основной областью применения этих датчиков является измерение угловых и линейных механических перемещений. При этом изменение входной величины преобразуется в изменение индуктивности катушки вследствие перемещения якоря, сердечника или самой катушки, что приводит к изменению напряжения или тока на выходе датчика.
Индуктивность катушки L с числом витков W простейшего датчика с подвижным якорем, показанного на рис.2.2, а, равна:

где Ф - магнитный поток; I - ток катушки.
Магнитный поток зависит от магнитного сопротивления цепи, состоящего из сопротивления стального магнитопровода RСТ, и сопротивления двух воздушных зазоров, равного  . Учитывая зависимость магнитного потока от указанных сопротивлений, получим выражение для индуктивности в виде:
. Учитывая зависимость магнитного потока от указанных сопротивлений, получим выражение для индуктивности в виде:

где SM - активная площадь магнитопровода. Известно, что ток в катушке равен

где Z - общее сопротивление катушки.
При неизменных конструктивных параметрах датчика ток через катушку зависит от величины воздушного зазора  , частоты напряжения питания
, частоты напряжения питания  и активного сопротивления обмотки R. Статическая характеристика датчика, представляющая собой зависимость выходной величины тока I от входной величины - воздушного зазора , т. е.
и активного сопротивления обмотки R. Статическая характеристика датчика, представляющая собой зависимость выходной величины тока I от входной величины - воздушного зазора , т. е.  , показана на рис.2.2, б. У индуктивных датчиков обычно
, показана на рис.2.2, б. У индуктивных датчиков обычно  , а активное сопротивление обмотки значительно меньше, чем ее индуктивное сопротивление. Если пренебречь величинами RCT и R, то получим выражение для статической характеристики в виде:
, а активное сопротивление обмотки значительно меньше, чем ее индуктивное сопротивление. Если пренебречь величинами RCT и R, то получим выражение для статической характеристики в виде:

Реальная характеристика индуктивного датчика отличается от построенной по этой формуле наличием некоторой нелинейности за счет тока при нулевом воздушном зазоре и его стремлением к значению насыщения при больших зазорах.
Индуктивные датчики применяются только при относительно низких частотах (до 3000-5000 Гц), так как на высоких частотах резко увеличиваются потери в стали на перемагничивание и реактивное сопротивление обмотки.
У рассмотренного датчика индуктивности для перемещения якоря в обоих направлениях необходим начальный воздушный зазор  , т. е. начальный ток I0, из-за чего возникают значительные погрешности измерений, вызванные колебаниями температуры и питающего напряжения. Для устранения этих недостатков, а также электромеханического усилия притяжения якоря, зависящего от величины воздушного зазора, применяется дифференциальный индуктивный датчик. Схема такого датчика показана на рис.2.2, в.
, т. е. начальный ток I0, из-за чего возникают значительные погрешности измерений, вызванные колебаниями температуры и питающего напряжения. Для устранения этих недостатков, а также электромеханического усилия притяжения якоря, зависящего от величины воздушного зазора, применяется дифференциальный индуктивный датчик. Схема такого датчика показана на рис.2.2, в.
При среднем положении якоря датчика электромеханические усилия, действующие на якорь от двух катушек, в значительной степени взаимно компенсируются практически во всем диапазоне измеряемых перемещений. Катушки индуктивности включаются в мостовую или дифференциальную схему. Характеристика дифференциального датчика показана на рис.2.2, г. При применении фазочувствительных выпрямительных схем дифференциальный датчик показывает также направление перемещения якоря от нулевого положения, так как ток I меняет при этом фазу. Рассмотренные датчики используются для измерения перемещений порядка десятых долей миллиметра.
Датчики индуктивности с подвижным, сердечником содержат две одинаковые катушки, расположенные на одной оси. Внутри катушек перемещается сердечник цилиндрической формы, который связан с измерителем. Когда сердечник расположен симметрично относительно катушек, то их индуктивные сопротивления одинаковы. При перемещении сердечника в ту или другую сторону индуктивность катушек изменяется. При этом индуктивность той катушки, в сторону которой переместился сердечник, увеличивается, а другой уменьшается. Соответственно изменяются токи, идущие через катушки. Статическая характеристика этого датчика имеет такой же вид, как и у датчика с подвижным якорем, но с несколько большим линейным участком (рис.2.2, г). Эти датчики могут быть использованы для измерения перемещений порядка десятков миллиметров.
Существуют датчики, работа которых основана на изменении коэффициента взаимной индукции М двух катушек. Такие датчики (рис.2.2, д) называются трансформаторными и содержат две катушки: одна W1 питается напряжением U1 переменного тока, а другая, состоящая из двух частей W2I и W2II, является выходной, и с нее снимается напряжение Uвых, пропорциональное перемещению якоря или сердечника.
Трансформаторные датчики для измерения малых перемещений выполняются с переменным зазором между якорем и сердечником, а для измерения средних перемещений - с переменной площадью зазора. Для измерения широкого диапазона перемещений используются датчики с подвижным сердечником, называемые плунжерными. Последние имеют преимущество перед другими трансформаторными датчиками, так как в них сердечник может быть изолирован от катушек герметической трубкой. В некоторых случаях выходная катушка состоит из двух частей, включенных навстречу друг другу. Выпускаются датчики, у которых выходная катушка может поворачиваться или перемещаться относительно сердечника. Такие датчики называются ферродинамическими.
Работа трансформаторного датчика происходит следующим образом. При среднем положении якоря напряжение Uвых=е1-е2 равно нулю, поскольку э.д.с. е1 и е2, индуктируемые в обмотках W2I и W2II (см. рис. 2.2, д), равны между собой. При смещении сердечника от среднего положения равновесие между э.д.с. нарушается, в результате чего на выходе датчика появляется переменное напряжение Uвых. Амплитуда этого напряжения пропорциональна величине смещения сердечника от нейтрального положения, а фаза направлению этого смещения.
К преимуществам трансформаторных датчиков относятся возможность больших перемещений якоря и отсутствие электрической связи между измерительной цепью и цепью электрического питания: между ними существует только магнитная связь.
С точки зрения динамических свойств индуктивный датчик является безынерционным звеном, если в качестве его выходного сигнала используется напряжение Uвых, и инерционным звеном, если в качестве выходного сигнала используется ток. Это объясняется тем, что частота напряжения питания намного выше возможной максимальной частоты колебаний якоря, поэтому амплитуда выходного напряжения соответствует установившемуся режиму работы. При переходе от выходного напряжения к току следует учитывать. индуктивность катушек и поэтому получаем
где R - общее сопротивление выходной цепи, что и позволяет считать датчик инерционным звеном с постоянной времени Т =L/R.
Емкостные датчики. Емкостный датчик представляет собой обычный плоский или цилиндрический конденсатор, изменение емкости которого происходит либо за счет перемещения одной из пластин, либо за счет изменения диэлектрической проницаемости е среды, находящейся между пластинами. При перемещении изменяется расстояние между ними б или взаимно перекрываемые площади S.
Все емкостные датчики работают на переменном токе высокой частоты и требуют обычно применения дополнительных усилителей напряжений, так как сигнал, получаемый от них, имеет очень малую величину. Для увеличения чувствительности такие датчики обычно выполняются дифференциальными (рис. 2.3, а), т. е. состоящими из двух неподвижных 1 и 3 и одной подвижной 2 пластин. При перемещении подвижной пластины изменяются емкости С12 и С23.
Емкость плоского конденсатора выражается зависимостью

где  - абсолютная диэлектрическая проницаемость вакуума. Если перемещение пластин х мало по сравнению с начальным зазором между пластинами, то нелинейную зависимость можно в диапазоне изменений зазора
- абсолютная диэлектрическая проницаемость вакуума. Если перемещение пластин х мало по сравнению с начальным зазором между пластинами, то нелинейную зависимость можно в диапазоне изменений зазора  линеаризовать.
линеаризовать.
При перемещении пластин получаем


Умножив и разделив выражение на  , а на
, а на  и пренебрегая в знаменателе членом
и пренебрегая в знаменателе членом  ввиду его малости, получим:
ввиду его малости, получим:

где  и
и  соответственно емкости
соответственно емкости  и
и  при начальном зазоре .
при начальном зазоре .


Рис.2.3. Емкостные датчики
Емкость линейно изменяется в зависимости от перемещения подвижной пластины с коэффициентом усиления  . Емкостные датчики обычно включаются в плечи мостовой схемы.
. Емкостные датчики обычно включаются в плечи мостовой схемы.
Емкостный датчик с изменяемой площадью пластин (рис. 2.3, б) имеет ряд неподвижных 5 и ряд подвижных 4 пластин. При повороте подвижных пластин по отношению к неподвижным изменяется величина активной площади датчика, что приводит к изменению его емкости.
Емкость конденсатора с изменяемой площадью пластин равна
где S0 - взаимно перекрываемая площадь между пластинами при = 0.
Как видно из формулы , емкость является линейной функцией угла поворота подвижной пластины относительно неподвижной, что, безусловно, является большим преимуществом датчика. Для дифференциального емкостного датчика с двумя неподвижными и одной подвижной пластинами также получим одинаковые по величине и разные по знаку изменения емкости:


Емкостные датчики с изменяющейся диэлектрической постоянной среды могут применяться для измерения концентрации электролитов или уровня жидкости. Обычно такие датчики выполняются в виде двух коаксиальных цилиндров 6,7 (рис.2.3, в), между которыми находится измеряемая жидкость 8. При изменении концентрации электролита или уровня жидкости линейно изменяется емкость датчика.
Датчики напряжения. У датчиков напряжения величина выходного напряжения пропорциональна измеряемой величине. К датчикам напряжения относятся сельсинные передачи, работающие в так называемом трансформаторном режиме, пьезоэлектрические датчики, термопары, различные тахогенераторы и др.
Сельсины выполняются по типу асинхронных машин переменного тока. В пазах статора уложена трехфазная статорная обмотка, причем отдельные фазные обмотки смещены относительно друг друга на 120°. Ротор сельсина имеет однофазную или трехфазную обмотку. Некоторые типы сельсинов выполняются с трехфазной обмоткой на роторе и однофазной - на статоре. Сельсинная передача состоит из двух сельсинов - датчика и приемника - и может применяться как для передачи на расстояние угловых перемещений, так и в качестве измерительного устройства, вырабатывающего на выходе напряжение, зависящее от угла рассогласования роторов сельсин-датчика и сельсин-приемника.
Режим работы сельсинов при передаче на расстояние угловых перемещений носит название индикаторного. Схема соединения сельсинов при работе в индикаторном режиме изображена на рис.2.4. Основной характеристикой индикаторного режима работы сельсинной передачи является зависимость синхронизирующего момента от угла рассогласования между роторами сельсин-датчика и сельсин-приемника.

Рис.2.4. Схема сельсинной передачи в индикаторном режиме
Если ротор Р сельсин-датчика (СД) повернут относительно статора С на угол , а ротор сельсин-приемника (СП) на угол , то в тдельных фазовых обмотках статоров сельсинов датчика (Е1Д - ЕАД) и приемника (Е1П - ЕАП) наводятся э.д.с, величины которых пропорциональны косинусам этих углов:
 ;
; 
 ;
; 
 ;
; 
где Ем - максимальное значение э.д.с. фазовой обмотки.
При одинаковом положении роторов СД и СП (т.е.-  =
=  ) величины э.д.с, наводимых в фазовых обмотках 1-3 и 1'-3', равны и токи в цепи статоров отсутствуют (i1 = i2 = i3 = 0). При наличии угла рассогласования
) величины э.д.с, наводимых в фазовых обмотках 1-3 и 1'-3', равны и токи в цепи статоров отсутствуют (i1 = i2 = i3 = 0). При наличии угла рассогласования  =-между положением роторов СД и СП значения э.д.с. различны и в цепи статоров возникнут уравнительные токи i1, i2, i3. Взаимодействие этих токов с потоками обмоток роторов Фр создает на осях СД и СП синхронизирующий момент, который стремится восстановить равновесие в системе. Значения токов i1, i2, i3 в зависимости от угла рассогласования равны:
=-между положением роторов СД и СП значения э.д.с. различны и в цепи статоров возникнут уравнительные токи i1, i2, i3. Взаимодействие этих токов с потоками обмоток роторов Фр создает на осях СД и СП синхронизирующий момент, который стремится восстановить равновесие в системе. Значения токов i1, i2, i3 в зависимости от угла рассогласования равны:



где Z - сопротивление фазовой обмотки статора.
Из уравнений зависимости значений токов i1, i2, i3 от угла рассогласования следует, что уравнительные токи обращаются в нуль только в том случае, когда роторы СД и СП находятся в согласованном положении, т. е. при  .
.
Величина синхронизирующего момента пропорциональна произведению потока ротора Фр на поперечную составляющую ампервитков (IWП) фазовых обмоток статора, образованную результирующими токами i1, i2, i3:

где k1 - коэффициент пропорциональности;  - угол сдвига фаз во времени между э.д.с. статорной обмотки и током в обмотке i.
- угол сдвига фаз во времени между э.д.с. статорной обмотки и током в обмотке i.
При синусоидальной форме кривой уравнительных токов результирующие ампервитки равны:
где W - число витков фазовой обмотки; k2 - коэффициент.
Следовательно, подставляя значения токов из уравнения уравнений зависимости значений токов i1, i2, i3 от угла рассогласования в и обозначая выражение  через В, получим:
через В, получим:
 ;
;
 ;
;
 .
.
Для определения поперечной составляющей результирующих ампервитков возьмем сумму проекций ампервитков каждой из фазовых обмоток на направление, перпендикулярное оси обмотки приемника:

Подставляя в это уравнение значения для  ,
,  ,
,  и выполнив математические преобразования, получим:
и выполнив математические преобразования, получим:

Поэтому выражение для синхронизирующего момента может быть записано в виде:

или, обозначая постоянную величину  через Мм, получим:
через Мм, получим:

Из этой формулы следует, что величина синхронизирующего момента пропорциональна синусу угла рассогласования. При малых углах рассогласования можно считать, что

Схема соединения сельсинов при работе в трансформаторном режиме изображена на рис.2.5. При этом переменное напряжение питания подводится только к обмотке ротора СД.
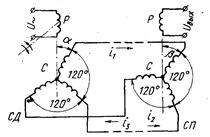
Рис.2.5. Схема сельсинной передачи в трансформаторном режиме
Статической характеристикой этого режима работы является зависимость напряжения, индуктируемого на роторной обмотке СП, от угла рассогласования  . Магнитный поток роторной обмотки СД индуктирует в фазовых обмотках его статора э.д.с. Е1 Е2 Е3, которые образуют фазовые токи i1, i2, i3:
. Магнитный поток роторной обмотки СД индуктирует в фазовых обмотках его статора э.д.с. Е1 Е2 Е3, которые образуют фазовые токи i1, i2, i3:
 ;
;
 ;
;
 ;
;
Эти токи создают переменные магнитные потоки, индуктирующие э.д.с. (Е1 Е2 Е3 ) в роторной обмотке СП. Сумма этих э.д.с. дает выходное напряжение Uвых ротора СП:
 ;
;
 ;
;
 ;
;

здесь С - коэффициент пропорциональности.
Подставляя в уравнение значение токов i1, i2, i3 и производя математические преобразования, получим:
или
Uвых=Uмсоs
где
Из формулы Uвых=Uмсоsвидно, что величина Uвых максимальна для угла φ=0 и равна нулю для φ=90°. Для практического использования удобнее обратная зависимость, когда в согласованном положении Uвых=0. Это легко может быть достигнуто, если за начальное положение принять такое, при котором роторы СД и СП сдвинуты между собой на угол 90°. В этом случае угол φ=90°+φ’, а выходное напряжение Uвых имеет амплитуду и фазу, которые однозначно определяются углом рассогласования:

Коэффициент усиления или чувствительность трансформаторной схемы  .
.
По динамическим свойствам сельсинная передача может быть отнесена к группе инерционных звеньев, постоянная времени у которой определяется индуктивностью обмоток ротора.
Пьезоэлектрические датчики работают на основе использования пьезоэлектрического эффекта, свойственного некоторым кристаллам. Для таких датчиков обычно применяется кварц, так как он при наличии сильно выраженного пьезоэлектрического эффекта одновременно обладает высокой механической прочностью, малой зависимостью свойств от температуры и высокими изоляционными свойствами. Из кристалла кварца вырезаются соответствующим образом ориентированные по отношению к его осям кристаллы, которые помещаются между металлическими электродами. Под действием силы F на пластинку в направлении электрической оси кристалла на его поверхностях, перпендикулярных этой оси, появляются заряды q, пропорциональные приложенному усилию и не зависящие от геометрических размеров пластинки:

где kF - пьезоэлектрическая постоянная или модуль.
Поскольку величина возникающего заряда весьма мала, то для измерения усилий обычно применяются две или несколько пластинок, включаемых параллельно с соблюдением полярности зарядов, что позволяет соответственно увеличить общий заряд. Малая величина заряда создает опасность его быстрой утечки через сопротивление изоляции. Во избежание этого в пьезоэлектрических датчиках применяются специальные мероприятия - полирование поверхности кварца, янтарная и полистироловая изоляция, а измерение возникающего напряжения производится с помощью специальных электрометрических ламп, сеточные токи которых ничтожно малы. Пьезоэлектрические датчики могут применяться для измерения параметров быстро протекающих динамических процессов, так как по динамическим свойствам они могут быть отнесены к безынерционным звеньям.
Тахогенераторы вырабатывают напряжение, пропорциональное скорости вращения, и используются как электрические датчики угловой скорости. В зависимости от вида выходного напряжения они разделяются на тахогенераторы постоянного и переменного тока.
Тахогенераторы постоянного тока (рис.2.6.) представляют собой электрические генераторы постоянного тока небольшой мощности и выполняются с магнитоэлектрическим возбуждением от специальной обмотки.

Рис.2.6. Схема тахогенератора
Электродвижущая сила якоря тахогенератора определяется выражением:

где ke - постоянный коэффициент; Фв - магнитный поток возбуждения; Q - угловая скорость.
Если поток ФВ создаётся постоянным магнитом, т. е. является величиной постоянной, то ЕВ зависит только от скорости вращения. Если же поток создается током возбуждения, то его можно менять, и тогда э.д.с. будет зависеть и от скорости вращения и от тока возбуждения. При ненасыщенной магнитной цепи поток ФВ можно считать прямо пропорциональным току возбуждения Iв, т.е.  где k1 - коэффициент пропорциональности.
где k1 - коэффициент пропорциональности.
Это позволяет использовать тахогенератор с внешним электрическим возбуждением для умножения двух величин, из которых одна выражена током возбуждения, а другая - скоростью вращения.
При наличии нагрузки на якоре тахогенератора происходит падение напряжения, поэтому выходное напряжение отличается от э.д.с. и равно:

где ток якоря  ; RН - сопротивление нагрузки.
; RН - сопротивление нагрузки.
Подставляя значение параметров в формулу , после соответствующих преобразований получим:

Это уравнение представляет собой статическую характеристику тахогенератора с коэффициентом усиления

величина которого определяется сопротивлением нагрузки и потоком возбуждения. Из уравнения статической характеристики тахогенератора видно, что выходное напряжение U линейно зависит от  даже при наличии нагрузки. При снижении сопротивления нагрузки чувствительность тахогенератора уменьшается. Наибольшее влияние на линейность статистической характеристики оказывает реакция якоря, которая ослабляет поток возбуждения. Для уменьшения этого влияния необходимо иметь большое сопротивление нагрузки RН и при измерениях использовать небольшой участок характеристики.
даже при наличии нагрузки. При снижении сопротивления нагрузки чувствительность тахогенератора уменьшается. Наибольшее влияние на линейность статистической характеристики оказывает реакция якоря, которая ослабляет поток возбуждения. Для уменьшения этого влияния необходимо иметь большое сопротивление нагрузки RН и при измерениях использовать небольшой участок характеристики.
Для получения динамической характеристики тахогенератора следует учесть индуктивность якоря. В этом случае уравнение для выходного напряжения имеет вид:
Так как IЯ=U/RH, a  , то получаем:
, то получаем:
или в операторной форме

где  - постоянная времени тахогенератора. Следовательно, передаточная функция тахогенератора запишется виде:
- постоянная времени тахогенератора. Следовательно, передаточная функция тахогенератора запишется виде:

Это позволяет сделать вывод, что тахогенератор представляет собой инерционное звено.
Тахогенераторы переменного тока разделяются на синхронные и асинхронные. Синхронный тахогенератор имеет ротор в виде постоянного магнита. Амплитуда и частота выходного напряжения такого тахогенератора пропорциональны скорости вращения. Обычно напряжение выпрямляется полупроводниковым выпрямителем. Выходное напряжение имеет переменную частоту, что затрудняет использование его в обычных схемах переменного тока. Кроме того, такой тахогенератор нечувствителен к изменению направления вращения.
От этих недостатков свободен асинхронный тахогенератор. Его конструкция подобная конструкции двухфазного двигателя с тонкостенным ротором. Обмотка возбуждения тахогенератора питается от сети переменного тока, а в выходной обмотке наводится э.д.с. переменного тока, имеющая частоту сети и амплитуду, пропорциональную скорости вращения ротора. При изменении направления вращения фаза выходного напряжения меняется на обратную.
Термопары применяются для точного измерения высоких (до 2500 °С) температур. В металлургии они используются для контроля и автоматического регулирования большинства тепловых процессов. К преимуществам термопар, помимо возможности измерения высоких температур, относятся сравнительно малая инерционность, простота и малые габариты получаемых датчиков. Более подробно термопары будут рассмотрены на лабораторных занятиях.
Датчики тока. У датчиков тока изменения регулируемой величины преобразуются в изменения тока через датчик. К датчикам такого типа в основном относятся фотоэлементы, хотя некоторые из них являются также датчиками напряжения.
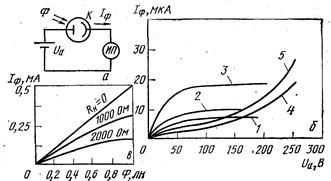
Рис. 2.7. Фотоэлементы и их характеристики: а - схема включений;
б - вольтамперные характеристики; в - световые характеристики
Принцип работы таких датчиков основан на изменении проводимости фотоэлементов или на возникновении в них э.д.с. под действием светового потока. В первом случае фотоэлемент осуществляет преобразование светового потока в ток. Это явление называется фотоэффектом. По виду фотоэффекта фотоэлементы разделяются на следующие типы:
а) с внешним фотоэффектом;
б) с внутренним фотоэффектом, называемые фоторезисторами.
Фотоэлемент с внешним фотоэффектом представляет собой
стеклянную колбу (рис.2.7, а), внутри которой размещаются два электрода - катод К и анод А. Катодом является светочувствительный слой, наносимый на внутреннюю поверхность колбы. Анодом служит электрод специальной формы (кольцо, диск, стержень), монтируемый внутри колбы и электрически изолированный от катода.
К электродам фотоэлемента подводится напряжение Ua от отдельного источника. При воздействии светового потока из катода вырываются электроны, которые под влиянием электрического поля движутся к аноду. Величина фототока Iф пропорциональна световому потоку Ф и измеряется прибором ИП:

где  - интегральная чувствительность фотоэлемента, соответствующая его коэффициенту усиления.
- интегральная чувствительность фотоэлемента, соответствующая его коэффициенту усиления.
Иногда внутри колбы создается вакуум: такие фотоэлементы называются вакуумными. В отдельных случаях, напротив, для усиления фототока в колбу вводится небольшое количество инертного газа. Такие фотоэлементы называются газонаполненными. Вследствие ионизации газа происходит значительное увеличение числа электронов, попадающих на анод, что приводит к соответствующему увеличению тока во внешней цепи фотоэлемента. Отношение величин токов в газонаполненном и в вакуумном фотоэлементах при тех же условиях освещения и при том же анодном напряжении называется коэффициентом газового усиления. Однако возможность зажигания самостоятельного разряда является существенным недостатком газонаполненного фотоэлемента.
Свойства фотоэлементов определяются их характеристиками.
При использовании фотоэлементов в качестве датчиков большое значение имеет изменение свойств фотоэлементов во времени под влиянием внешних факторов. Некоторые характеристики служат для определения изменения этих свойств.
Спектральной характеристикой фотоэлемента называется кривая зависимости фототока от частоты или длины волны света при постоянной интенсивности светового потока. Эта кривая отображает распределение чувствительности по спектру излучения.
Для катодов фотоэлементов, предназначенных для видимой или инфракрасной области излучения, обычно используются щелочные металлы, поверхность которых подвергается специальной обработке. У этих катодов в определенной спектральной области имеется резкий максимум чувствительности.
Вольтамперные характеристики отображают зависимость фототока от напряжения на фотоэлементе при постоянной величине светового потока. На рис.2.7, б приведены вольтамперные характеристики некоторых типов фотоэлементов. Характеристики вакуумных фотоэлементов (кривые 1-3) имеют участок насыщения. Это объясняется тем, что все электроны, вылетающие из катода, достигают анода. Фототок можно увеличить только за счет увеличения светового потока, при этом начало участка насыщения перемещается в сторону больших значений анодного напряжения.
Вольтамперные характеристики газонаполненных фотоэлементов (кривые 4, 5) резко отличаются от характеристик вакуумных фотоэлементов. Из этих кривых видно, что вначале ток медленно изменяется с увеличением напряжения, а затем быстро возрастает за счет ионизации газа. С увеличением освещенности кривые перемещаются влево и ионизация наступает при меньшем значении анодного напряжения.
Если анодное напряжение достаточно велико, то возникший в фотоэлементе самостоятельный разряд уже не будет зависеть от светового потока, а сила тока будет определяться главным образом параметрами внешней цепи. Интенсивная бомбардировка катода ионами приводит к порче фотоэлемента, поэтому его режим работы должен быть выбран таким, чтобы анодное напряжение было меньше напряжения зажигания.
Световой характеристикой фотоэлемента называется кривая, выражающая зависимость фототока от величины светового потока при постоянном анодном напряжении, обеспечивающем режим насыщения. Для вакуумных фотоэлементов эти характеристики являются прямыми линиями, проходящими через начало координат (рис. 2.7, б).
Для газонаполненных фотоэлементов пропорциональная зависимость фототока от светового потока справедлива при относительно слабом световом потоке.
При использовании фотоэлементов для измерения весьма важное значение имеет стабильность их интегральной и спектральной чувствительности. Как показывает опыт, чувствительность фотоэлементов уменьшается со временем - сказывается так называемое утомление фотоэлементов. При расчете фотоэлектрических устройств (в особенности для измерительных целей) следует учитывать это уменьшение чувствительности, которое для цезиевых газонаполненных элементов может составлять до 25% первоначальной величины.
В последнее время широкое применение в различных областях техники получили вентильные фотоэлементы.
Принципиальное их отличие от фотоэлементов с внешним фотоэффектом заключается в том, что вентильные фотоэлементы под действием светового потока сами создают э.д.с. и поэтому не нуждаются в постороннем источнике напряжения.
Фоторезисторы относятся к полупроводниковым приборам: их сопротивление меняется под действием света. Они обладают высокой стабильностью сопротивления, незначительными инерционностью и температурной зависимостью, а также почти пропорциональной зависимостью между фототоком и световым потоком.
Темновое сопротивление полупроводникового слоя стремятся снизить путем уменьшения расстояния между электродами. Одним из методом уменьшения этого расстояния является гребенчатое расположение электродов. На изолирующую пластинку наносятся электроды, которые входят друг в друга наподобие зубцов двух гребешков. На все пространство между электродами наносится светочувствительный полупроводниковый слой. Под действием света сопротивление этого слоя значительно уменьшается, что и лежит в основе работы фоторезисторов.
В качестве полупроводникового материала в фоторезисторах применяются сернистый свинец (фоторезисторы ФС-А), селенистый свинец (СФ-4), сернистый кадмий (ФС-К).
Основным параметром фоторезисторов является чувствительность определяемая по вольтамперной или по световой характеристикам. Максимальная чувствительность фоторезисторов зависит от величины допустимого напряжения.
При использовании фоторезисторов в высокочастотных схемах следует учитывать инерционность этих сопротивлений. Постоянные времени фоторезисторов находятся в пределах  с. Эти значения справедливы для светового потока порядка 10-5 лм. При его увеличении постоянная времени уменьшается.
с. Эти значения справедливы для светового потока порядка 10-5 лм. При его увеличении постоянная времени уменьшается.
В настоящее время наряду с рассмотренными фотоэлементами в качестве датчиков тока применяются также фотодиоды и фототриоды, в которых используется чувствительность электронно-дырчатого перехода в полупроводниках к световому потоку. Фотодиод включается в цепь источника тока в направлении обратной проводимости. При отсутствии светового потока в цепи нагрузочного сопротивления, включенного последовательно с фотодиодом, протекает небольшой ток обратной проводимости, так называемый темновой ток. Если зона электронно-дырчатого перехода освещается световым потоком, то ток возрастает пропорционально величине светового потока.
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 11142; Нарушение авторских прав?; Мы поможем в написании вашей работы!