КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Электромашинные усилители
Электромашинные усилители (ЭМУ) применяются в тех случаях, когда требуется преобразовать входной сигнал в постоянный ток большой мощности. Обычно такие усилители используются для питания исполнительных электродвигателей постоянного тока, скорость которых должна регулироваться плавно.
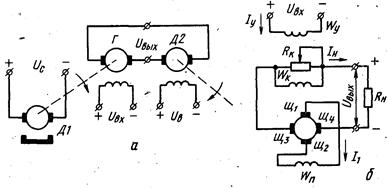
Рис.2.18. Схемы электромашинных усилителей
Простейшим электромашинным усилителем является генератор постоянного тока Г, вращаемый с постоянной скоростью с помощью вспомогательного двигателя Д1 (рис.2.18, а). Выходное напряжение U вых генератора пропорционально потоку возбуждения. Подавая входное напряжение UBX на обмотку возбуждения, можно управлять выходным напряжением генератора, меняя его величину и знак. Коэффициент усиления определяется отношением выходной мощности генератора к мощности, рассеиваемой на обмотке возбуждения, и может равняться 20-100. Нагрузкой генератора, как уже указывалось, обычно является цепь якоря исполнительного двигателя Д2. Зависимость выходного напряжения генератора от управляющего напряжения линейна в начальной части характеристики, которая достигает насыщения при большом значении управляющего тока. Вследствие гистерезиса магнитной цепи характеристика имеет вид узкой петли.
Наряду с простыми электромашинными усилителями применяются также более совершенные усилители с поперечным полем (рис.2.18, б). Якорь такого усилителя содержит две пары щеток, расположенных перпендикулярно одна к другой, вместо одной пары щеток в обычных усилителях.
На статоре располагаются одна или несколько управляющих обмоток WУ, компенсационная обмотка WK, обмотка подмагничивания WП и обмотка добавочных полюсов. Если подать на обмотку управления ток Iу, создаваемый напряжением UBX, то по продольной оси усилителя образуется поток Фу. В поперечной цепи якоря под действием этого потока наводится э. д. с. поперечной цепи Е1. Поперечная пара щеток Щ1 и Щ2 замкнута на малое сопротивление обмотки подмагничивания, поэтому даже небольшая э.д.с. Е1 вызывает в поперечной цепи значительный по величине ток I1. Этот ток, протекая по якорю, создает поперечный магнитный поток Ф1, благодаря которому в продольной цепи якоря наводится э. д. с. Е2, снимаемая со щеток продольной цепи Щ3 и Щ4 на нагрузку RH.
Эффект усиления связан с тем, что поперечный поток Ф1 оказывается значительно большим, чем вызвавший его исходный продольный поток Фу. Когда к щеткам продольной цепи подключена нагрузка, то по проводникам якоря проходит ток нагрузки Iн. Напряжение Uвых отличается от э. д. с. E2 на величину IнRi т. е. Uвых = Е2-IHRi, где Ri - внутреннее сопротивление ЭМУ. Поток реакции якоря Ф2, создаваемый нагрузочным током, действует навстречу потоку управления Фу, компенсируя его действие. Поэтому во всех ЭМУ с поперечным полем, помимо управляющей обмотки, предусмотрена так называемая компенсационная обмотка Wк, которая выполняется из толстого провода и включается в цепь нагрузки таким образом, чтобы ее поток ФК мог скомпенсировать действие потока Ф2. Направление потока Фк совпадает с направлением потока Фу.
На холостом ходу (IН = 0) E2 и Uвых прямо пропорциональны управляющему току Iу, а следовательно, и входному напряжению UBX, так что Uвых = kЭUBX, где kЭ - коэффициент усиления ЭМУ. При наличии нагрузочного тока Е2 может увеличиваться или уменьшаться по сравнению с э. д. с. холостого хода в зависимости от соотношения между потоками Ф2 и Фк. При |Фк|=|Ф2] усилитель полностью скомпенсирован и его э.д.с. не зависит от тока нагрузки. При |ФК|<|Ф2| увеличение нагрузочного тока вызывает уменьшение э.д.с. При |Фк|>|Ф2| увеличение нагрузочного тока сопровождается увеличением э.д.с.
В последнем случае у усилителя может возникнуть такое отрицательное явление, как самовозбуждение. Наиболее целесообразно применение ЭМУ с небольшой недокомпенсацией. Необходимая степень компенсации подбирается путем шунтирования компенсационной обмотки резистором с регулируемым сопротивлением RK. Зависимость выходного напряжения от входного в этом случае линейна на рабочем участке, затем при больших значениях управляющего тока характеристика достигает насыщения и имеет гистерезис, как и характеристика простого ЭМУ. Для уменьшения гистерезиса иногда на основное магнитное поле накладывают дополнительное переменное поле с небольшой амплитудой.
Электромашинный усилитель с поперечным полем состоит как бы из двух каскадов: в первом осуществляется переход от слабого потока управления к более сильному потоку поперечной цепи, во втором - поперечный поток преобразуется в выходное напряжение, и ток. Поэтому коэффициент усиления ЭМУ достигает порядка нескольких тысяч. Часто ЭМУ и вспомогательный двигатель выполняются в одном агрегате, что позволяет уменьшить массу и габаритные размеры. В режиме полной компенсации электромашинный усилитель как динамическое звено может быть представлен в виде цепочки последовательно соединенных инерционных звеньев.
Первым инерционным звеном является управляющая цепь, в качестве входной величины которой можно рассматривать напряжение UBX, а в качестве выходной э.д.с. Е1 связанные уравнениями:


где  - индуктивность обмотки управления; RУ - ее сопротивление;
- индуктивность обмотки управления; RУ - ее сопротивление;  ,
, - коэффициенты.
- коэффициенты.
После соответствующих преобразований получим:
где Ту = Ly/Ry - постоянная времени цепи управления;  - коэффициент усиления.
- коэффициент усиления.
Вторым звеном служит поперечная цепь усилителя, имеющая индуктивность L1 и сопротивление R1. Связь между э.д.с. Е1 и током I1 запишется в виде:
а э.д.с. Е2, подаваемая на нагрузку RH, равна:

где k2, c2 - коэффициенты, или
Где Т1 = L1/R1 - постоянная времени поперечной цепи; kя - коэффициент усиления.
Если нагрузка содержит индуктивную составляющую LН, то
или

Таким образом, общая передаточная функция ЭМУ в режиме полной компенсации будет равна:
Обычно усилители настраивают на режим работы с небольшой недокомпенсацией. Поэтому поток реакции якоря оказывает влияние на характеристики и динамические свойства ЭМУ, создавая дополнительную отрицательную обратную связь и ослабляя действие потока управления.
|
Дата добавления: 2014-01-11; Просмотров: 956; Нарушение авторских прав?; Мы поможем в написании вашей работы!