КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Алгоритм выполнения задачи представляется в форме последовательности управляющих слов, которые определяют операции и слова информации. Такую последовательность называют кодами
|
|
|
|
Слова информации размещаются в ячейки памяти машины и идентифицируются по номеру ячейки памяти.
Программа – это последовательное выполнение команд в порядке обозначенном алгоритмом. Иногда программу определяют как алгоритм, представленный в терминах команд. Каждая операция (команда) может преобразовывать операнды различного уровня сложности. На сегодня различают три уровня: 1) микрокоманды: элементарное преобразование операнда. Например: занесение с входа в память, пересылка из одного регистра в другой, вывод содержимого регистра на выходных данных. Главное отличая микрокоманд – она выполняется за один такт синхронизации. Поскольку у тактового импульса два фронта, возможно, в рамках микрокоманды «протолкнуть информацию» через два регистра. На большее фронтов нет. Обычно микрокоманда составная часть операции. Любая микрокоманда состоит из двух действий: фиксации входа операнда в регистре (памяти) момент фиксации – фонт синхросигнала. И действие – фиксация выходного сигнала по срезу синхроимпульса. Длительность импульса необходима чтобы: а) закончить переходные процессы в регистре б) чтобы сигнал был преобразован комбинационной схемой и истинным стоял на входе регистра. Современная микрокоманда, как правило, элементарная операция АЛУ типа сложения. Микрокоманда присутствует в любом вычислителе, программно они же не ощущаются. 2) команды часто приравнивают к операциям. Например, сложение и вычитание. Действительно логически проще мыслить операцией. Поэтому, это наиболее распространенный вид управления, большинство современных вычислителей основано на командном уровне управления. команда включает в себя множество микрокоманд. Их число от единиц до десятков. При этом не обязательно помнить все микрокоманды текущей команды. Их последовательность формируется автоматически по жесткой программе. 3) Макрокоманды или тэги. Макрокоманды появились в силу того, что сложные процедуры требовали большого числа команд, обращений в память. Переход на макрокоманды сокращал число обращений в память, повышая тем самым скорость выполнения. В любой ситуации макрокоманды так же состояли из последовательности микрокоманды. В зависимости от вида управления информация, хранящаяся в памяти, представляется как формат микрокоманды, команды, макрокоманды. Принято изображать любой формат прямоугольником с соответствующей длины с указанием начального и конечного разрядов информации. Если принято байтовая система (слово) формат разделяется на байты. Такое деление необходимо, чтобы каждую команду можно было осмыслить. Понять по ее формату работу (состав). В приделах формата команда представляется полями, поэтому это деление может быть показано. Первым словом (байтом) любой команды всегда идет КОП. За КОП могут следовать адреса – вначале младший затем старший байты; данные – также. Если команда сложная она размещается не в одном байте КОП. последующие байты КОП называются пост байтами. Команда, какой бы сложности она не была, хранится в ячейках ПЗУ.
Процессор в первом шаге выполнения любой команды выставляет на ШД или в регистр состояния – КОП (фазы), которую будет выполнять. Начало команды – всегда выборка команды. Такой код называется словом состояния процессора. Этот код помогает выработать управляющие сигналы для других схем вычислителя: памяти, ВУ и т.д. В каждом цикле (r/w) ССП меняется, и используя его, можно формировать сигналы управления для всех ВУ. Во многих структурах эти сигналы формируются из слово состояния системным контроллером. Если слово состояние не выводится на ШД, оно фиксируется во внутреннем регистре состояний, и управляющие сигналы появляются на выходных ногах процессора. Команда выполняется как: 1) из ПЗУ читается КОП за ним последующие байты (поля команд). Для каждого поля (байта) устройство управления формирует слово состояния, из разрядов которого можно получить требуемые активные сигналы, для включения ОЗУ, ПЗУ и других ВУ. Фиксация состояний – по фронтам синхросигналов.
4.2.Устройства управления с жесткими связями
Большинство современных процессоров ориентировано на командный тип управления. Структура такого процессора включает управляющую часть и операционную. На вход управляющей части поступает КОП, код команды. С выхода управляющей части в операционную поступают сигналы микрокоманд. С каждым тактом они обновляются. С выхода операционной в управляющую поступают признаки, флаги, изменяющие последовательность микрокоманд, поскольку для каждой команды необходимо множество микрокоманд. Управляющая часть – операционный автомат, изменяющий свое состояние по сигналам кода команды и синхросигналам. Структура такого автомата обычно имеет вид.(Рис.7.).
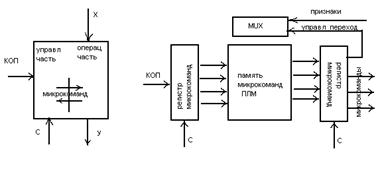
(а) (б)
Рис.7 Структуры автоматов с программным (а) и микропрограммным (б) управлением
Структура называется с жестким управлением, поскольку пользователь не может сам изменить таблицу ПЛМ. В результате каждой операции на входе соответствует строго своя последовательность микрокоманд. На предприятии можно поменять кодировку, и скорость выполнения операций изменяется без изменения кодов команд. Проводились опыты по применению перепрограммирования матричных структур в качестве устройств управления микропроцессором. Основной недостаток тех структур – большая задержка в элементах матриц, что приводило к увеличению времени выборки. В то же время получаемая гибкость, возможность изменения микрокоманд была не большой. Необходимость в таком изменении для схем широкого применения не нужна, следовательно такие структуры целесообразны, если универсальный микропроцессор используется как специализированный вариант G спецпроцессора.
4.3. Микропрограммный принцип управления
Является основным при разработке специализированных схем и при использовании в секционированных микропроцессорах. В его основе лежит введение промежуточного преобразования кода команд в микрокоманды на основе схем памяти. Управление на уровне команд – это связь памяти команд с процессором. Но внутри самого процессора из КОП необходимо получать последовательность микрокоманд. Это последовательность может меняться. Если ее записывать в память – промежуточную, то смена содержимого памяти эквивалентно замене микрокоманд последовательным преобразованием сигналов.
С приходом КОП (Рис.8.)дешифратор начальной команды (ПЛМ)
|
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 1253; Нарушение авторских прав?; Мы поможем в написании вашей работы!