КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Окно вывода
|
|
|
|
Особенности расчета вибрационных машин.
Системы с одной степенью свободы.
10. Составление дифференциального уравнения колебаний (Метод Д/ Аламбера). Стр.26-28.
11. Составление дифференциального уравнения колебаний (Метод Лагранжа). Стр. 28-29.
12. Составление дифференциального уравнения колебаний (Обратный метод). Стр. 29.30.
13. Свободные колебания без затухания. Стр. 30-31.
14. Определение коэффициентов жесткости комбинированных систем. Пример. Стр.32-33.
15.Работа сил упругости при гармонических колебаниях за один период. Стр. 33.
16.Свободные колебания с затуханием системы с одной степенью свободы. Стр. 33-35.
17. Работа сил вязкого сопротивления за один период гармонических колебаний. Стр. 36.
18. Коэффициент демпфирования гидравлического демпфера. Пример. Стр. 36-37.
- Вынужденные колебания системы без затухания. Стр. 37-39.
20.Вынужденные колебания системы с затуханием. Стр. 39-41.
21. Работа, совершаемая при гармоническом движении. Стр. 42.
- Виброзащитные устройства для систем без затухания. Стр. 43.
- Виброзащитные устройства для систем с затуханием. Стр.43-45.
Приближенные методы расчета низшей собственной частоты колебаний. 24.Формула Рэлея. Сущность метода, кинематические и силовые граничные условия. Стр.46.
- Вывод формулы Релея. Стр.48-48.
- Способы определения формы колебаний. Стр. 49.
- Формула Донкерлея. Стр.53-54.
Раздел 3. Вибрационные машины и оборудование.
27. Особенности проектирования вибрационных машин. Стр. 56-58.
28. Особенности проектирования вибрационных машин. Стр. 58- 61.
- Принципы конструирования подшипниковых опор. Стр. 61-64.
- Вибровозбудители инерционные. Стр.68-69.
- Вибровозбудители кривошипно- шатунные. Стр. 69-71.
- Вибровозбудители поршневые. Стр. 71-73.
- Вибровозбудители электромагнитные. Стр. 73-75.
- Вибровозбудители маятниковые центобежные. Стр.75-76.
- Вибровозбудители уравновешенные эксцентриковые. Стр.76-79.
- Вибровозбудители уравновешенные эксцентриковые. Стр.79-80.
- Вибровозбудители уравновешенные эксцентриковые. Стр.80-82.
- Вибровозбудители уравновешенные эксцентриковые. Стр. 82-84.
- Вибрационные площадки. Вибропрессовое оборудование.. и др. Стр.85-86; 89-91.
- Глубинные вибраторы. Стр.86-89.
- Вибрационные транспортирующие машины. Стр. 91-94.
- Виброгрохоты. Стр. 94-97.
- Виброплиты нереверсивные. Стр. 97-99.
- Виброплиты реверсивные. Стр. 99-102.
- Вибротрамбовки. Стр.102-104.
- Расчет мощности привода. Стр.104-105.
- Расчет фундамента. Стр.105-106.
- Расчет критической угловой скорости валов. Стр.106-107.
49.Упругие элементы вибромашин. Стр.107-109.
Иногда при построении изображений возникает необходимость разделить экран на несколько прямоугольных областей (графических окон) с тем, чтобы в каждом из окон строить свое изображение. В модуле GRAPH для этих целей имеется специальная процедура SetViewPort:
SetViewPort(X1, Y1, X2, Y2: Integer; ClipMode: Boolean);
где переменные X1, Y1, X2 и Y2 задают координаты диагонали окна, а параметр ClipMode определяет будет ли отображаться часть изображения попавшая за пределы окна или нет. Параметр ClipMode может принимать два значения. Значение ClipOn (true) указывает на то, что часть изображения попавшая за пределы окна не должна выводится на экран, а значение ClipOff (false) указывает на возможность вывода изображения попавшего за границы окна. После выполнения этой процедуры графический экран “сжимается” до размеров окна, текущий указатель перемещается левый верхний угол окна и туда же перемещается начало координат. Если параметр ClipMode равен ClipOn, то часть экрана вне окна становится недоступной.
Назначение графического окна можно использовать для перемещения начала системы координат устройства. Так, если задать окно вызовом
SetViewPort(GetMaxX div 2, GetMaxY div 2, GetMaxX, GetMaxY, ClipOff);
то получим систему координат с началом в центре экрана. При этом станет “видимой” адресация отрицательных координат.
Работу с графическими окнами можно организовать и без использования процедуры SetViewPort. Для этого достаточно лишь немного модифицировать рассмотренные ранее функции преобразования координат.
Выделим на экране прямоугольную область с диагональю (XWmin,YWmin) – (XWmax,YWmax):
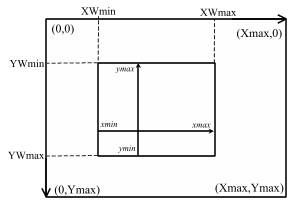
Совместим с этой областью математическую систему координат, заданную параметрами xmin, ymin, xmax и ymax. Формулы преобразования координат в этом случае будут иметь следующий вид:

(2)

При работе с мировыми координатами и использовании данного способа организации графических окон, целесообразно включить в программу следующий блок описаний:
CONST
XWmin: integer = 0; { Переменные, определяющие окно вывода }
YWmin: integer = 0; { по умолчанию – весь экран }
XWmax: integer = 639;
YWmax: integer = 479;
VAR
xmin, xmax, ymin, ymax: real; { Мировая система координат }
PROCEDURE SetWorldCoords(x1, y1, x2, y2: real);
{ Процедура назначения мировых координат }
BEGIN
xmin:= x1; xmax:= x2;
ymin:= y1; ymax =: y2
END;
PROCEDURE SetWindow(x1, y1, x2, y2: integer);
{ Процедура установки параметров окна вывода }
BEGIN
XWmin:= x1; XWmax:= x2;
YWmin:= y1; YWmax:= y2
END;
{ Функции преобразования мировых координат к координатам устройства }
FUNCTION Xs(x: real): integer;
BEGIN
Xs:= XWmin + round((XWmax-XWmin)* (x-xmin)/(xmax-xmin))
END;
FUNCTION Ys(y: real): integer;
BEGIN
ys:= YWmax - round((YWmax-YWmin)* (y-ymin)/(ymax-ymin))
END;
Введение в программу процедур SetWorldCoords и SetWindow не является обязательным, поскольку их действия можно реализовать и непосредственно в основном блоке программы. При организации нескольких окон вывода использование этих процедур становится целесообразным, поскольку сокращает текст программы и улучшает ее читабельность. Более того, согласно принципам структурного программирования, любую более или менее обособленную и законченную операцию желательно оформлять в виде отдельной подпрограммы.
|
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 490; Нарушение авторских прав?; Мы поможем в написании вашей работы!