КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Организация управляющего автомата с программируемой логикой управления
|
|
|
|
Организация управляющего автомата
При построении УА используются два основных способа: 1) схемная (‘жёсткая’) логика управления и программируемая (‘мягкая’) логика управления.
ОУ работает во времени тактами. В каждом такте ОА может выполнить одну или несколько совместимых МО. Для этого УА должен вырабатывать в каждом такте один или несколько управляющих сигналов (импульсов). Например:
такт i – y1,
такт i+1 – y2, y5, y6,
такт i+2 – y2, y7, y8.
Очевидный способ формирования управляющих сигналов состоит в следующем: набору сигналов y1, y2,..., yМ (одна из функций ОА) ставится в соответствие слово Y= y1, y2,..., yМ, в котором каждой МО, которая должна выполнятся в данном такте, ставится в соответствие единица, если нет – то ноль, т.е. производится унитарное кодирование МО. Пример: М=8, такт i+1, y2 = y5 = y6 =1, остальные нули. Это слово используется для управления (элементами И): 1 – элемент И открыт для прохождения импульса с ГТИ, 0 – закрыт (рисунок 5.19).
Чтобы в следующем такте можно было вырабатывать другие сигналы, достаточно сменить слово Y на входе этой схемы.
Двоичный код Y, на основе которого вырабатываются управляющие сигналы, естественно называют управляющим словом или микрокомандой (МК). Алгоритм операции fgєF, описанный в терминах МК, называют микропрограммой. Для хранения микропрограммы естественно использовать ПЗУ. Из ПЗУ МК извлекаются поочерёдно и используются для выработки управляющих сигналов ym.
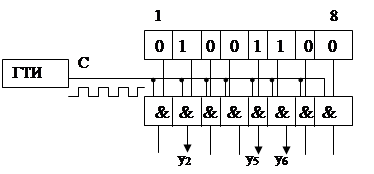 |
Рисунок 5.19 – Схема формирования управляющих сигналов
Идея формирования управляющих сигналов на основе МК, извлекаемых из ПЗУ, принадлежит англичанину Уилксу. УА, построенный в соответствии с идеей Уилкса, и называется УА с программируемой логикой (ПЛ) управления. (С. Хассон. Микропрограммное управление.– М: Мир, 1973, вып.1,2) Со времени своего рождения (начало 50–х годов) идея Уилкса претерпела значительные изменения, усовершенствования (эволюцию). Усовершенствования вызваны следующими обстоятельствами: 1) при большом числе управляющих сигналов (М – десятки, сотни) использование идеи Уилкса, т.е. унитарного кодирования МО, ведёт к большой длине МК и, следовательно, к большой ёмкости ПЗУ для хранения МП. В связи с этим встаёт естественная задача сокращения длины МК. Самый простой способ сокращения длины МК – использование позиционного кода вместо унитарного: т.н. позиционное кодирование МО. Пример: М=8, y5=1, остальные сигналы равны нулю (рисунок 5.20). Пусть y5 кодируется кодом 5=101.
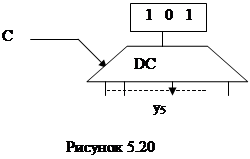 |
Длина позиционного кода m= log2M (M=2m). Недостаток позиционного кодирования очевиден: в каждом такте можно вырабатывать только один сигнал. Это нежелательно, т.к. вносит ограничения на совместимость МО и снижает производительность ОА.
Поэтому на практике обычно применяется третий способ кодирования МО –т.н. смешанное кодирование. Суть: всё множество МО Y= y1, y2,..., yМ разделяется на группы несовместимых МО (в каждую группу включаются несовместимые МО). Количество групп МО определяется максимальным количеством совместимых МО, выполняемых в одном такте. Каждой группе МО ставится в соответствие поле МК. В этом поле указывается позиционный код одной МО из этой группы (рисунок 5.21). Пример: три группы МО - первая состоит из семи МО, вторая – из 9, третья – из 18. Разрядность полей: k=3 (log27), h=4 (log29), n=5 (log218). Всего: 3+4+5=12 разрядов вместо М= 36 (7+9+18) при унитарном кодировании.
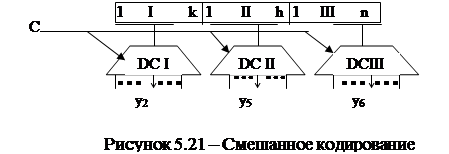 |
Итак, при унитарном кодировании длина МК равна М (максимальное значение), при позиционном кодировании m=log2M(минимальное значение), при смешанном m<k+h+n<M.
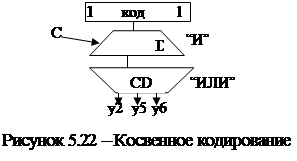
Нельзя ли ещё уменьшить длину МК? При определённых условиях можно, если использовать четвёртый способ кодирования – т.н. косвенное кодирование МО. Суть: кодированию подвергаются не отдельные МО, а наборы совместимых МО. Пример: набор МО Yi=y2y5y6 кодируется кодом длиной l=log2L, где L – количество наборов совместимых МО (рисунок 5.22). Условие применения косвенного кодирования: log2L < k+h+n.
 |
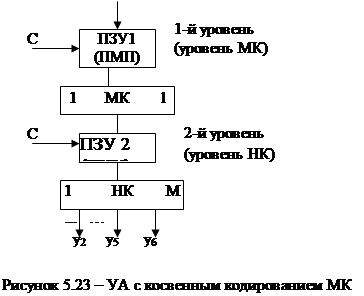 |
Следует отметить, что вместо связки из дешифратора DС и шифратора СD можно использовать т. н. программируемую логическую матрицу (ПЛМ) или ПЗУ. В случае использования ПЗУ в ячейках ПЗУ, количество которых L (совпадает с количеством групп МО), размещаются т.н. нанокоманды (НК) – унитарно закодированные МО y1, y2,..., yМ (длина ячеек ПЗУ – М разрядов). В этом случае структура УА приобретает вид (рисунок 5.23).
В ней используется ПЗУ на двух уровнях кодирования: на уровне МК (позиционное) и на уровне НК (унитарное). В ПЗУ1 хранятся микрокоманды операций f1, …, fg ОУ, в ПЗУ2 – нанокоманды совместимых наборов МО. По этой причине косвенное кодирование иначе еще называют двухуровневым кодированием (в отличие от одноуровневого смешанного кодирования).
Итак, назначение УА – выработка управляющих сигналов в зависимости от значений ЛУ х1, …, хL, поступающих из ОА. Поскольку сигналы y1, y2,..., yМ фактически хранятся в ПЗУ в виде управляющих слов – МК, то порядок их выборки (чтения) из ПЗУ нужно поставить в зависимость от осведомительных сигналов: если, например, хi=1, то выбирается одна МК, если хi=0, то другая. Для этого в МК достаточно указать i – номер осведомительного сигнала в списке х1, …, хL в специальном поле – в поле Х МК, а в третьем поле А необходимо указать адрес перехода. Тогда формат команды приобретает вид:
 |
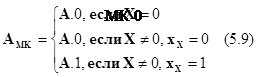 |
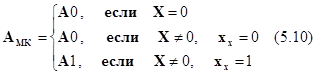
Адрес очередной команды, извлекаемой из ПЗУ, в простейшем случае формируется следующим образом:
Здесь А - k-разрядное поле (адрес) из микрокоманды, к которому добавляется еще один бит – k+1-й: ЕПЗУ=2k+1- емкость ПЗУ. В поле Х заносится ноль, если организуется переход от одной МК к другой на линейных участках микрокоманды: это т. н. принудительный (безусловный) переход. В случае условного перехода в поле Х МК указывается номер l=Х осведомительного сигнала xl из набора x1 … xL, значение которого используется в качестве условия альтернативного перехода в алгоритме. Если условие выполняется (xl = xx = 1), то адрес –А.1 – нечетный, если не выполняется (xl = xx = 0), то адрес –А.0 – четный.
Рассмотренный (первый) способ формирования адреса МК называется принудительной адресацией МК. Простейшая структура УА с ПЛ и с принудительной адресацией МК изображена рисунке 5.23. Порядок функционирования этой схемы иллюстрируется временной диаграммой, представленной на рисунке 5.24.
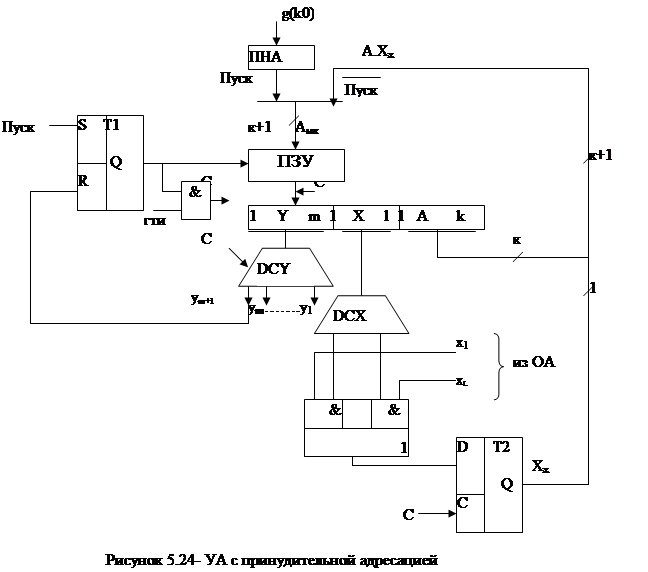
ЦУУ процессора, расшифровав команду, посылает код операции g в соответствующее ОУ (например, в АЛУ) и сигнал “ПУСК”. По сигналу ПУСК УА ОУ (например, АЛУ) выбирает первую микрокоманду из ПЗУ по адресу, который формируется преобразователем начального адреса ПНА на основе кода операции g. По фронту сигнала С МК заносится в регистр МК (РМК) для исполнения. На основе поля Y вырабатываются управляющие сигналы ym для ОА. На основе полей Х, А формируется адрес следующей МК в соответствии с формулой (5.9). По завершении этапа выполнения МО в ОА и формирования осведомительных сигналов один из них xl заносится (по спаду сигнала С) в триггер Т2 и используется при формировании адреса в следующем такте.
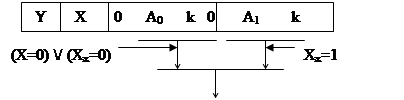
Недостатки принудительной адресации: неэффективное использование ПЗУ из-за четной адресации ячеек - линейная цепочка МК в ПЗУ занимает только четные ячейки (нечетные пустуют). Как избавиться от этого недостатка? Можно использовать другой формат МК:
 |
 |

В этом случае в ПЗУ используются все ячейки: и четные и нечетные. Однако длина МК увеличилась за счет дополнительного поля адреса А1, кроме того, в случае принудительного (не условного) перехода поле А1 не используется совсем. Это означает, что длину МК можно уменьшить. Как? Путем использования естественной (как у Неймана в процессоре) адресации МК на линейных участках. Для этого в состав УА необходимо ввести счетчик МК (СМК) и использовать его для адресации МК в соответствии с выражением:
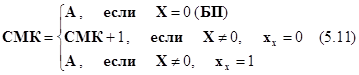
где А – адресная часть МК.
УА, в котором формирование адреса следующей МК осуществляется на основе СМК, называют УА с естественной адресацией МК.
Следует отметить, что при естественной адресации нет необходимости вводить адресное поле А в каждую МК. Адресное поле А необходимо только в МК перехода – условного или безусловного. В результате множество МК делится на два типа: управления и операционные.
 Операционные МК состоят из одного поля Y, управляющие – из полей Х, А. Для того, чтобы отличить МК одного типа от МК другого типа, в формат МК вводят бит типа МК – бит Р: Р=0 – операционная МК, Р=1 – управляющая:
Операционные МК состоят из одного поля Y, управляющие – из полей Х, А. Для того, чтобы отличить МК одного типа от МК другого типа, в формат МК вводят бит типа МК – бит Р: Р=0 – операционная МК, Р=1 – управляющая:
 |
Длина ячейки ПЗУ определяется из условия: max ((m+1),(k+l+1)).
Достоинство УА с естественной адресацией МК: сокращение длины МК и, следовательно, емкости ПЗУ (затрат оборудования).
Недостаток: использование МК двух типов увеличивает время выполнения всей микрокоманды, т. к. в этом случае невозможно совмещение во времени выполнения МО и переходов в микропрограмме: либо переход, либо обработка. Избавиться от этого недостатка можно, если использовать МК с форматом из трех полей: Y, X, А.
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 873; Нарушение авторских прав?; Мы поможем в написании вашей работы!