КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Передачи винт – гайка
|
|
|
|
ОБЩИЕ СВЕДЕНИЯ
Передача винт - гайка представляет собой кинематическую винтовую пару, которую используют для преобразования вращательного движения в поступательное (с большой плавностью и точностью хода) в различных областях машиностроения, в приборостроении. Винтовые механизмы часто применяют в качестве подъемных (домкраты и др.) и нагружающих устройств (прессы и др.), так как с их помощью можно просто получать большие усилия (500— 1000 кН) при малых перемещениях.
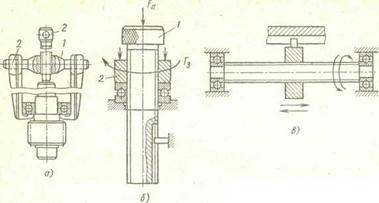
Рис. 22.1. Распространенные типы механизмов
В зависимости от характера движения винта и гайки различают ряд механизмов. Простейшие из них показаны на рис. 22.1, а — в.
Винтовой механизм на рис. 22.1, а представляет собой двухзвенный механизм (стойка - неподвижная гайка 1 и подвижное звено — винт 2) с винтовым движением подвижного звена, который используют на практике для создания силы.
В механизмах на рис. 22.1, б и в оба звена, образующих винтовую пару, подвижны. При этом в первом из них вращение гайки приводит к поступательному перемещению винта, а во втором — вращение винта вызывает поступательное перемещение гайки.
Эти две схемы винтовых механизмов применяют наиболее часто в приводах, так как передача вращательного движения на винт или гайку от двигателя не вызывает затруднений.
На практике используют механизмы с резьбой различных профилей (см. гл. 32). В силовых механизмах большое распространение получила трапецеидальная резьба (ГОСТ 9484 -73), а в механизмах приборов — метрическая резьба (ГОСТ 8724 - 81).
Преимущества механизмов — простота конструкций, плавность и точность хода, большое передаточное отношение, а также возможность самоторможения.
Основной недостаток передачи — низкий КПД.
КИНЕМАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ И КПД ПЕРЕДАЧИ
Кинематические характеристики. Скорость относительного перемещения гайки и винта, м/с:

где z — число заходов винта; Р — шаг резьбы; п — частота вращения гайки или винта, об/мин.
Число заходов z = 1 назначают для самотормозящихся винтов; для несамотормозящихся механизмов принимают z = 2; 4 (см. ниже).
Вращение винта или гайки в механизмах осуществляется обычно с помощью маховика (рукоятки), шестерни и т. п., при этом передаточное отношение можно условно представить в виде отношения перемещений маховика Sм к соответствующему перемещению гайки (винта) SГ:

где D — диаметр маховика (шестерни и т. п.); S = zP — ход винта.
Зависимость между окружной силой на маховичке FM и осевой силой на гайке (винте) Fa найдем из равенства работ:

откуда
 , (22.1)
, (22.1)
где  — КПД механизма;
— КПД механизма;  и
и  — перемещения маховика и гайки.
— перемещения маховика и гайки.
При D = 200 мм, Р = 1,5 мм, z = 1 и = 0,5 Fа = 200 FМ и и  420.
420.
Таким образом, винтовая передача позволяет с малым вращающим моментом создать большую силу (получить выигрыш в силе) или осуществить медленные точные перемещения. Первое из указанных достоинств используют в домкратах, прессах и других устройствах, второе достоинство реализуют в регулировочных механизмах, механизмах подачи станков, механизмах управления механизацией крыльев летательных аппаратов и т. д.
Коэффициент полезного действия механизмов. Если винт 1 (рис. 22.1, б) нагружен осевой силой Fa, то для его поступательного перемещения к маховичку 2 необходимо приложить момент  , который будет расходоваться на преодоление сопротивления в резьбе
, который будет расходоваться на преодоление сопротивления в резьбе  и трение на опорном торце маховичка ТT. Обычно момент трения на торце невелик, так как передачу осевой силы осуществляют через упорный подшипник, т. е. положим Т3 = Тр.
и трение на опорном торце маховичка ТT. Обычно момент трения на торце невелик, так как передачу осевой силы осуществляют через упорный подшипник, т. е. положим Т3 = Тр.
а) б)
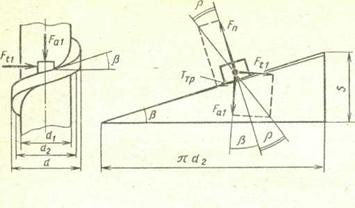
Рис. 22.2. К определению КПД винтовой пары
Зависимость между ними можно установить из равенства работ за один оборот винта. Предположим, что нагрузка Fa равномерно распределена между витками прямоугольного сечения (F1 — усилие на один виток). Тогда, переходя к одному витку (рис. 22.2, а), введем в рассмотрение его расчетную модель в виде наклонной плоскости (рис. 22.2, б), угол подъема которой  где S и d2 — ход и средний диаметр резьбы винта.
где S и d2 — ход и средний диаметр резьбы винта.
Если через Ftl обозначить окружную силу на одном витке и учесть, что реакция от гайки на винт будет наклонена к нормали под углом трения  = arctg f (f- коэффициент трения, f =0,08
= arctg f (f- коэффициент трения, f =0,08 0,12), то несложно установить
0,12), то несложно установить

Из равенства работ за один оборот гайки

получим
 (22.2)
(22.2)
КПД механизма найдем как отношение работ на завинчивание винта без учета сил трения ( = 0 и = 0) и с учетом сил трения. Тогда из зависимости (22.2) следует
= 0 и = 0) и с учетом сил трения. Тогда из зависимости (22.2) следует
 (22.3)
(22.3)
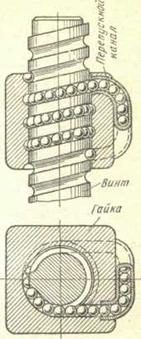
Рис. 22.3. Шариковинтовый механизм
Из формулы (22.3) видно, что КПД передачи возрастает с увеличением угла подъема  и уменьшением коэффициента трения в резьбе (уменьшением ).
и уменьшением коэффициента трения в резьбе (уменьшением ).
Для увеличения угла подъема в винтовых механизмах применяют много-заходные винты. Ход резьбы в этом случае S = Pz (Р и z — шаг и число заходов резьбы). Однако винты с > 25° на практике не применяют, так как дальнейшее увеличение не дает существенного повышения КПД, а передаточное отношение при этом снижается. Обычно  0,7.
0,7.
Для повышения КПД винтовых механизмов стремятся уменьшить коэффициент трения в резьбе путем изготовления гаек из антифрикционных материалов (бронзы, латуни и др.), смазывания трущихся поверхностей, тщательной обработки контактирующих поверхностей.
В последние годы получили распространение шариковинтовые механизмы (рис. 22.3). В таких механизмах между витками винта и гайки размещаются шарики. При вращении винта шарики увлекаются в направлении его поступательного движения, попадают в обводной канал в гайке и возвращаются в полость между винтом и гайкой. Механизмы имеют высокий КПД ( 0,9), так как коэффициент трения качения невелик (
0,9), так как коэффициент трения качения невелик ( 0,01).
0,01).
РАСЧЕТ НЕСУЩЕЙ СПОСОБНОСТИ ЭЛЕМЕНТОВ ПЕРЕДАЧИ
Расчет на износ. Работоспособность передачи по изнашиванию оценивается условно по среднему контактному давлению на рабочих гранях витков (рис. 22.4):
 (22.4)
(22.4)
где d2 и  — средний диаметр и рабочая высота профиля резьбы; zB — число витков; [р] — допускаемое контактное давление, используется в расчете как критерий подобия, отражающий предшествующий опыт эксплуатации механизмов, зависит от материалов винта и гайки.
— средний диаметр и рабочая высота профиля резьбы; zB — число витков; [р] — допускаемое контактное давление, используется в расчете как критерий подобия, отражающий предшествующий опыт эксплуатации механизмов, зависит от материалов винта и гайки.
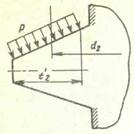
Рис. 22.4. Контактные давления на рабочей грани резьбы 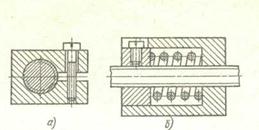
Рис. 22.5. Устройства для компенсации «мертвого» хода в резьбе
Ходовые винты изготовляют из высокоуглеродистых сталей 40, 45, 50, 40ХН, 50ХГ, 65Г и др. с закалкой до твердости HRC> 50. Гайки изготовляют из оловянистых бронз БрОФ10 -1, БрОбЦбСЗ и др. при высоких окружных скоростях ( 0,25 м/с), а при малых скоростях вращения используют антифрикционные чугуны марок АВЧ-1, АВЧ-2, АКЧ-1, АКЧ-2 или серые чугуны марок СЧ 15, СЧ 20.
0,25 м/с), а при малых скоростях вращения используют антифрикционные чугуны марок АВЧ-1, АВЧ-2, АКЧ-1, АКЧ-2 или серые чугуны марок СЧ 15, СЧ 20.
Допускаемые давления для пар винт — гайка: из закаленной стали и бронзы [p] = 1013 МПа; незакаленной стали и бронзы [р] = 8 10 МПа; незакаленной стали и антифрикционного чугуна [р] = 67 МПа; незакаленной стали и серого чугуна [р] = 45 МПа. Для механизмов точных перемещений (делительных и др.) значения [р] принимают в 2-3 раза меньше, чем для механизмов общего назначения.
В винтовых механизмах можно применять более высокие гайки, нежели в резьбовых соединениях, так как вследствие износа и приработки распределение нагрузки между витками резьбы улучшается. Увеличение высоты гайки позволяет повысить работоспособность передачи. Требуемое число рабочих витков, определяющих высоту гайки:

Наружный диаметр гайки назначают D = (3 3,5) d, здесь d — наружный диаметр резьбы.
В механизмах, к которым предъявляются жесткие требования компенсации износа с целью уменьшения «мертвого» хода (зазора между витками винта и гайки), применяют разрезные гайки (рис. 22.5, а) или специальные устройства (например, пружинные, рис. 22.5, б), обеспечивающие радиальную или осевую выборку зазора.
Расчет винтов на прочность. Расчет на прочность выполняют для винтов домкратов, прессов и других тяжелонагруженных устройств.
Напряжения растяжения (сжатия) и кручения определяют так же, как для резьбовых соединений (Wp — полярный момент сопротивления сечения):


Условие прочности винта

Значения допускаемых напряжений даны в гл. 32.
Расчет на устойчивость проводится для длинных высоко-нагруженных винтов (домкратов и др.). Условие устойчивости винтов по допускаемым напряжениям имеет вид
где  — коэффициент уменьшения допускаемых напряжений, выбирается в зависимости от параметра гибкости:
— коэффициент уменьшения допускаемых напряжений, выбирается в зависимости от параметра гибкости:
 30 50 60 80 100 120 140 160
30 50 60 80 100 120 140 160
 0,91 0,86 0,82 0,70 0,52 0,37 0,29 0,24
0,91 0,86 0,82 0,70 0,52 0,37 0,29 0,24
В связи с наличием зазоров в резьбе в схеме расчета на устойчивость принимают шарнирное закрепление концов винта ( = 1). Радиус инерции i =
= 1). Радиус инерции i =  = 0,25 d (здесь J — осевой момент инерции сечения, J =
= 0,25 d (здесь J — осевой момент инерции сечения, J =  64; A — площадь поперечного сечения винта).
64; A — площадь поперечного сечения винта).
|
|
|
|
Дата добавления: 2014-01-13; Просмотров: 6747; Нарушение авторских прав?; Мы поможем в написании вашей работы!