КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Место компьютера в современных системах автоматизации
|
|
|
|
Основные подходы при построении компьютеризированной системы автоматизации:
1) Главным устройством системы автоматизации (управления или контроля) является персональный компьютер с дополнительным аппаратным и программным обеспечением. Такое решение является дешевой альтернативой полноценной системе управления.
Существует огромное разнообразие датчиков (температуры, влажности, давления, потока, скорости, ускорения, вибрации, веса, натяжения, частоты, момента, освещенности, шума, объема, количества теплоты, тока, уровня и др.) которые преобразуют физическую величину в электрический сигнал. Если параметры сигнала не согласуются с параметрами входа аналого-цифрового преобразователя (АЦП) или не соответствуют стандарту (например, входной величиной АЦП является напряжение в диапазоне 0...10 В, а датчик (термопара) имеет выходное напряжение в диапазоне от 0 до 100 мВ), то используют измерительный преобразователь, который обеспечивает нормализацию сигнала датчика (приведение к стандартным диапазонам изменения, обеспечение линейности, компенсацию погрешности, усиление и т.п.). Измерительные преобразователи обычно совмещают с модулями аналогового ввода.
Измерительные преобразователи могут иметь встроенный АЦП или ЦАП (цифро-аналоговый преобразователь), а также микропроцессор для линеаризации характеристик датчика и компенсации погрешностей аналоговой части системы. В последнее время получили распространение цифровые датчики, объединяющие в себе первичный преобразователь физической величины в электрический сигнал, измерительный преобразователь и АЦП.
Для ввода в компьютер аналоговых сигналов служат модули аналогового ввода. Универсальные модули ввода могут воспринимать сигналы различных диапазонов, например: напряжения ±150 мВ, ±500 мВ, ±1 В, ±5 В, ±10 В и тока ±20 мА.
|
|
|
Кроме модулей аналогового ввода широко распространены модули дискретного ввода, которые не содержат АЦП и позволяют вводить сигналы, имеющие два уровня (например, сигналы от концевых выключателей, датчиков открывания двери, пожарных датчиков, охранных датчиков движения и т. п.). Уровни входных сигналов модулей дискретного ввода могут изменяться в диапазоне, как правило, 0...24 В или 0...220 В. Модули с входом 220 В используются, например, для регистрации наличия напряжения на клеммах электродвигателя или нагревательного прибора.
 Отдельное место занимают устройства счетного ввода, которые имеют дискретный вход и позволяют считать количество или частоту следования импульсов. Их используют, например, для измерения скорости вращения вала электродвигателя или подсчета продукции на конвейере.
Отдельное место занимают устройства счетного ввода, которые имеют дискретный вход и позволяют считать количество или частоту следования импульсов. Их используют, например, для измерения скорости вращения вала электродвигателя или подсчета продукции на конвейере.
Рисунок 1.2 – Структура системы управления с персональным компьютером в качестве главного устройства системы
Устройства вывода (модули вывода) позволяют выводить дискретные, частотные или аналоговые сигналы. Дискретные сигналы используются, например, для включения электродвигателей, электрических нагревателей, для управления клапанами, фрамугами, насосами и другими исполнительными устройствами. Частотный сигнал используется обычно для управления средней мощностью устройств с большой инерционностью с помощью широтно-импульсной модуляции.
2) Персональный компьютер выступает в роли вспомогательного устройства, основными устройствами выступают микроконтроллеры, ПЛК, автономные регистраторы и т.д., то есть специализированные микропроцессорные устройства автоматизации. Причем, в случае распределенной системы автоматизации, таких устройств, объединенных телекоммуникационной сетью, может быть несколько.
|
|
|
В этом случае ПК выполняет функции программирования основного устройства, визуализации технологического процесса, оповещения об аварийных ситуациях, задания технологических режимов. Основную же функцию управления или контроля с различной степенью автономности выполняет, например, контроллер.
 |
Рисунок 1.3 – Структура системы управления с персональным компьютером в качестве вспомогательного устройства системы
3) Можно выделить отдельно так наз. РС-контроллеры – устройства, объединяющие контроллер и ПК в упрощенном варианте. То есть имеется текстовый или графический дисплей с ограниченным набором функций, клавиатура с набором функциональных клавиш, коммутационный порт и устройства связи с объектами (УСО).
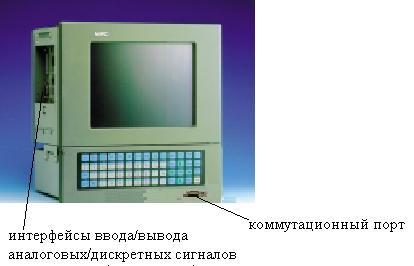 |
Рисунок 1.4 - РС-контроллер
В последнее время наметилась тенденция стирания грани между компьютером и контроллером. С одной стороны, контроллеры позволяют подключить монитор, мышь и клавиатуру, с другой стороны, появилось большое количество промышленных компьютеров, которые имеют специальное конструктивное исполнение и другие свойства, характерные для контроллеров.
3. Централизованные и децентрализованные (распределенные) системы управления
Компьютеризированная система управления может быть централизованной и децентрализованной. В первом случае (обычно это небольшие системы автоматизации) имеется одно устройство (контроллер или компьютер), управляющее объектом (процессом).
С ростом количества датчиков и исполнительных усройств, увеличением площади территории, на которой расположена автоматизированная система и усложнением алгоритмов управления становится более эффективным применение распределенных систем.
Распределенную систему управления (РСУ, DCS — Distributed Control System) можно определить как систему, состоящую из множества устройств, разнесенных в пространстве, каждое из которых не зависит от остальных, но взаимодействует с ними для выполнения общей задачи.
Распределенные системы состоят из множества территориально разнесенных контроллеров, децентрализованных модулей ввода-вывода, устройств человеко-машинного интерфейса и т.д., связанных друг с другом посредством промышленной телекоммуникационной сети. При таком подходе структура распределенной системы и структура алгоритма ее работы становятся подобны структуре самого объекта автоматизации, а функции сбора, обработки данных, управления и вычисления оказываются распределенными среди множества контроллеров.
|
|
|
Большие объекты и сложные технологические процессы разбиваются на локальные подпроцессы, каждым из которых управляет локальная система управления (ЛСУ) на базе обычно одного управляющего устройства.
Максимальные преимущества распределенной системы достигаются, когда контроллеры работают автономно, а обмен информацией между ними сведен до минимума.
Распределенная система имеет следующие характеристики, отличающие ее от централизованной (сосредоточенной):
- большее быстродействие благодаря распределению задач между параллельно работающими процессорами;
- повышенную надежность (отказ одного из контролеров не влияет на работоспособность других);
- большую устойчивость к сбоям;
- более простое наращивание или реконфигурирование системы;
- упрощенную процедуру модернизации;
- большую простоту проектирования, настройки, диагностики и обслуживания благодаря соответствию архитектуры системы архитектуре объекта управления, а также относительной простоте каждого из модулей системы;
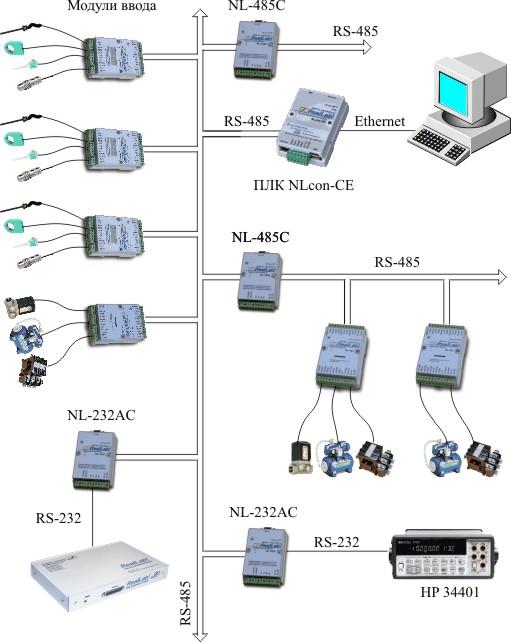
Рисунок 1.5 - Пример архитектуры распределенной системы сбора данных и управления на модулях
- улучшенную помехоустойчивость и точность благодаря уменьшению длины линий передачи аналоговых сигналов от датчиков к устройствам ввода;
- меньший объем кабельной продукции, пониженные требования к кабелю и более низкая его стоимость;
- меньшие расходы на монтаж и обслуживание кабельного хозяйства.
При разработке проекта, включая определение необходимых вычислительных ресурсов, необходимо исходить из требований, предъявляемых ко всей технической системе, т. е. совокупности технического процесса и системы управления. Основное требование к системе управления заключается в том, что ее ресурсы должны соответствовать целям управления и параметрам управляемой системы.
|
|
|
Уровень сложности КСУ и, соответственно, тип управления, определяется сложностью ТП (объекта) – количество датчиков и исполнительных механизмов определяет количество входов и выходов системы, распределенность и протяженность объекта в пространстве определяет способы подключения датчиков и ИМ к управляющему устройству, сложность модели объекта и алгоритма управления определяют мощность процессора, объем памяти управляющего устройства.
|
|
|
|
Дата добавления: 2014-01-13; Просмотров: 533; Нарушение авторских прав?; Мы поможем в написании вашей работы!