КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Режимы работы микропроцессорной системы
|
|
|
|
Как уже отмечалось, микропроцессорная система обеспечивает большую гибкость работы, она способна настраиваться на любую задачу. Гибкость эта обусловлена прежде всего тем, что функции, выполняемые системой, определяются программой (программным обеспечением, software), которую выполняет процессор. Аппаратура (аппаратное обеспечение, hardware) остается неизменной при любой задаче. Записывая в память системы программу, можно заставить микропроцессорную систему выполнять любую задачу, поддерживаемую данной аппаратурой. К тому же шинная организация связей микропроцессорной системы позволяет довольно легко заменять аппаратные модули, например, заменять память на новую большего объема или более высокого быстродействия, добавлять или модернизировать устройства ввода/вывода, наконец, заменять процессор на более мощный. Это также позволяет увеличить гибкость системы, продлить ее жизнь при любом изменении требований к ней.
Но гибкость микропроцессорной системы определяется не только этим. Настраиваться на задачу помогает еще и выбор режима работы системы, то есть режима обмена информацией по системной магистрали (шине).
Практически любая развитая микропроцессорная система (в том числе и компьютер) поддерживает три основных режима обмена по магистрали:
• программный обмен информацией;
• обмен с использованием прерываний (Interrupts);
• обмен с использованием прямого доступа к памяти (ПДП, DMA — Direct Memory Access).
Программный обмен информацией является основным в любой микропроцессорной системе. Он предусмотрен всегда, без него невозможны другие режимы обмена. В этом режиме процессор является единоличным хозяином (или задатчиком, Master) системной магистрали. Все операции (циклы) обмена информацией в данном случае инициируются только процессором, все они выполняются строго в порядке, предписанном исполняемой программой.
Процессор читает (выбирает) из памяти коды команд и исполняет их, читая данные из памяти или из устройства ввода/вывода, обрабатывая их, записывая данные в память или передавая их в устройство ввода/вывода. Путь процессора по программе может быть линейным, циклическим, может содержать переходы (прыжки), но он всегда непрерывен и полностью находится под контролем процессора. Ни на какие внешние события, не связанные с программой, процессор не реагирует (рис. 1.11). Все сигналы на магистрали в данном случае контролируются процессором.
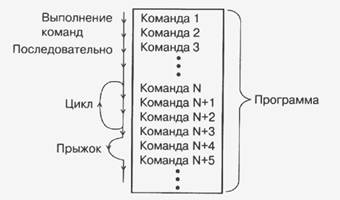
Рис. 1.11. Программный обмен информацией.
Обмен по прерываниям используется тогда, когда необходима реакция микропроцессорной системы на какое-то внешнее событие, на приход внешнего сигнала. В случае компьютера внешним событием может быть, например, нажатие на клавишу клавиатуры или приход по локальной сети пакета данных. Компьютер должен реагировать на это, соответственно, выводом символа на экран или же чтением и обработкой принятого по сети пакета.
В общем случае организовать реакцию на внешнее событие можно тремя различными путями:
• с помощью постоянного программного контроля факта наступления события (так называемый метод опроса флага или polling);
• с помощью прерывания, то есть насильственного перевода процессора с выполнения текущей программы на выполнение экстренно необходимой программы;
• с помощью прямого доступа к памяти, то есть без участия процессора при его отключении от системной магистрали.
Проиллюстрировать эти три способа можно следующим простым примером. Допустим, вы готовите себе завтрак, поставив на плиту кипятиться молоко. Естественно, на закипание молока надо реагировать, причем срочно. Как это организовать? Первый путь — постоянно следить за молоком, но тогда вы ничего другого не сможете делать. Правильнее будет регулярно поглядывать на молоко, делая одновременно что-то другое. Это программный режим с опросом флага. Второй путь — установить на кастрюлю с молоком датчик, который подаст звуковой сигнал при закипании молока, и спокойно заниматься другими делами. Услышав сигнал, вы выключите молоко. Правда, возможно, вам придется сначала закончить то, что вы начали делать, так что ваша реакция будет медленнее, чем в первом случае. Наконец, третий путь состоит в том, чтобы соединить датчик на кастрюле с управлением плитой так, чтобы при закипании молока горелка была выключена без вашего участия (правда, аналогия с ПДП здесь не очень точная, так как в данном случае на момент выполнения действия вас не отвлекают от работы).
Первый случай с опросом флага реализуется в микропроцессорной системе постоянным чтением информации процессором из устройства ввода/вывода, связанного с тем внешним устройством, на поведение которого необходимо срочно реагировать.
Во втором случае в режиме прерывания процессор, получив запрос прерывания от внешнего устройства (часто называемый IRQ — Interrupt ReQuest), заканчивает выполнение текущей команды и переходит к программе обработки прерывания. Закончив выполнение программы обработки прерывания, он возвращается к прерванной программе с той точки, где его прервали (рис. 1.12).
Здесь важно то, что вся работа, как и в случае программного режима, осуществляется самим процессором, внешнее событие просто временно отвлекает его. Реакция на внешнее событие по прерыванию в общем случае медленнее, чем при программном режиме. Как и в случае программного обмена, здесь все сигналы на магистрали выставляются процессором, то есть он полностью контролирует магистраль.
Для обслуживания прерываний в систему иногда вводится специальный модуль контроллера прерываний, но он в обмене информацией не участвует. Его задача состоит в том, чтобы упростить работу процессора с внешними запросами прерываний. Этот контроллер обычно программно управляется процессором по системной магистрали.
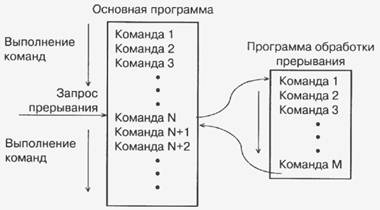
Рис. 1.12. Обслуживание прерывания.
Естественно, никакого ускорения работы системы прерывание не дает. Его применение позволяет только отказаться от постоянного опроса флага внешнего события и временно, до наступления внешнего события, занять процессор выполнением каких-то других задач.
Прямой доступ к памяти (ПДП, DMA) — это режим, принципиально отличающийся от двух ранее рассмотренных режимов тем, что обмен по системной шине идет без участия процессора. Внешнее устройство, требующее обслуживания, сигнализирует процессору, что режим ПДП необходим, в ответ на это процессор заканчивает выполнение текущей команды и отключается от всех шин, сигнализируя запросившему устройству, что обмен в режиме ПДП можно начинать.
Операция ПДП сводится к пересылке информации из устройства ввода/ вы вода в память или же из памяти в устройство ввода/вывода. Когда пересылка информации будет закончена, процессор вновь возвращается к прерванной программе, продолжая ее с той точки, где его прервали (рис. 1.13). Это похоже на режим обслуживания прерываний, но в данном случае процессор не участвует в обмене. Как и в случае прерываний, реакция на внешнее событие при ПДП существенно медленнее, чем при программном режиме.
Понятно, что в этом случае требуется введение в систему дополнительного устройства (контроллера ПДП), которое будет осуществлять полноценный обмен по системной магистрали без всякого участия процессора. Причем процессор предварительно должен сообщить этому контроллеру ПДП, откуда ему следует брать информацию и/или куда ее следует помещать. Контроллер ПДП может считаться специализированным процессором, который отличается тем, что сам не участвует в обмене, не принимает в себя информацию и не выдает ее (рис. 1.14).
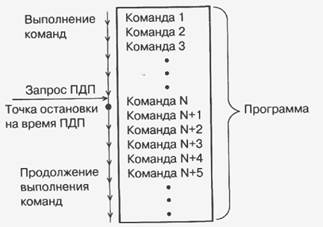
Рис. 1.13. Обслуживание ПДП.
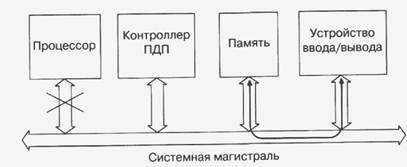
Рис. 1.14. Информационные потоки в режиме ПДП.
В принципе контроллер ПДП может входить в состав устройства ввода/вывода, которому необходим режим ПДП или даже в состав нескольких устройств ввода/вывода.
Теоретически обмен с помощью прямого доступа к памяти может обеспечить более высокую скорость передачи информации, чем программный обмен, так как процессор передает данные медленнее, чем специализированный контроллер ПДП. Однако на практике это преимущество реализуется далеко не всегда. Скорость обмена в режиме ПДП обычно ограничена возможностями магистрали. К тому же необходимость программного задания режимов контроллера ПДП может свести на нет выигрыш от более высокой скорости пересылки данных в режиме ПДП. Поэтому режим ПДП применяется редко.
Если в системе уже имеется самостоятельный контроллер ПДП, то это может в ряде случаев существенно упростить аппаратуру устройств ввода/ вывода, работающих в режиме ПДП. В этом, пожалуй, состоит единственное бесспорное преимущество режима ПДП.
|
|
|
|
|
Дата добавления: 2014-01-13; Просмотров: 511; Нарушение авторских прав?; Мы поможем в написании вашей работы!