КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Система управления на основе спектрального датчика потенциала
|
|
|
|
1 –  камера тлеющего разряда;
камера тлеющего разряда;
2 – измеритель тока разряда;
3 – высоковольтный источник электропитания;
4 – устройство управления;
5 – датчик потенциала;
6 – регулирующий орган расхода метана;
7 – смеситель;
К1 – технологический катод;
К2 – катод датчика тока.
Отличие от предыдущей системы управления состоит в том, что устройство управления 4 получает информацию о текущем значении потенциала атмосферы. Для этого используют датчик потенциала 5, размещенный напротив окна или высокотемпературного эндоскопа.
Использование датчика потенциала 5 для измерения потенциала атмосферы повышает качество управления процессом насыщения.
Автоматизированные системы управления технологическим процессом
Область применения автоматизированных систем управления технологическим процессом (АСУ ТП):
1) регулирование технологических параметров процесса ТО или ХТО (в основном – многомерных и многосвязных объектов с несколькими каналами регулирования);
2) программное управление объектом;
3) управление, связанное с большим объемом математической обработки, например, – с использованием моделирования;
4) оптимальное управление объектом.
 Структура АСУ ТП
Структура АСУ ТП
1 – объект управления;
2 – датчики и контрольно-измерительная аппаратура;
3 – усилители-преобразователи;
4 – линии связи;
5 – интерфейс;
6 – вычислительное устройство – промышленный компьютер или контроллер;
7 – устройство ручного ввода;
8 – локальные автоматические регуляторы;
9 – исполнительные элементы и регулирующие органы;
10 – буферные элементы;
11 – дисплей или индикатор;
12 – алгоритм;
 – вектор управляемых величин;
– вектор управляемых величин;
 ,
,  – вектор управляющих воздействий;
– вектор управляющих воздействий;
 – вектор контролируемых возмущающих воздействий;
– вектор контролируемых возмущающих воздействий;
 – вектор вспомогательных параметров;
– вектор вспомогательных параметров;
 – вектор заданных значений;
– вектор заданных значений;
УДВ – устройство дискретного ввода-вывода.
АСУ ТП функционирует следующим образом.
Объект управления 1 оснащен датчиками и контрольно-измерительной аппаратурой 2 для измерения управляемых величин  , управляющих величин
, управляющих величин  , вспомогательных параметров и возмущающих воздействий .
, вспомогательных параметров и возмущающих воздействий .
Выходные сигналы датчиков и аппаратуры 2 могут иметь различную физическую природу (электрические, пневматические) и амплитуду. Для преобразования их к единому уровню унифицированных сигналов применяют усилители-преобразователи 3. Чаще всего используют унифицированные сигналы 0…5 мА и 0…10 В. Токовый сигнал предпочтительнее, т.к. более помехоустойчив.
Унифицированные сигналы через линии связи 4 поступают в аналого-цифровые преобразователи (АЦП), которые входят в состав интерфейса 5 вычислительного устройства 6 – промышленного компьютера или микропроцессора.
Вычислительное устройство 6 в соответствии с алгоритмом 12 обрабатывает полученную информацию и вырабатывает управляющие воздействия  . Управляющие воздействия поступают через цифроаналоговый преобразователь (ЦАП) интерфейса 5 в линии связи 4.
. Управляющие воздействия поступают через цифроаналоговый преобразователь (ЦАП) интерфейса 5 в линии связи 4.
Различают два способа организации управления – централизованное и децентрализованное.
При централизованном управлении вычислительное устройство непосредственно управляет исполнительными элементами 9, минуя локальные автоматические регуляторы 8 (пунктирная линия на рис.).
При децентрализованном управлении вычислительное устройство выполняет функции программного задатчика (вырабатывает вектор заданных значений ) для локальных автоматических регуляторов 8. Управляющие воздействия локальных регуляторов 8 через исполнительные элементы 9 поступают в объект управления 1.
Устройство дискретного ввода-вывода УДВ предназначено для ввода в вычислительное устройство и передачи в объект управления информации в дискретной форме, например сигналов концевых выключателей; управляющих сигналов включения-выключения нагревателей, тлеющего разряда, клапанов насосов и т.д.
Устройство ручного ввода 7 (клавиатура или пульт) предназначено для ввода в вычислительное устройство исходных данных и корректирующих воздействий.
Требования к структуре АСУ ТП
Требования назначают с учетом специфических условий термического цеха:
- запыленность и загазованность;
- высокий уровень электромагнитных помех.
1. В качестве вычислительного устройства используют помехо-, пыле-, влагозащищенный компьютер (промышленный компьютер) или контролер, оснащенный встроенным интерфейсом.
2. Входные и выходные цепи интерфейса снабжают гальванической развязкой (обычно оптоэлектронной).
3. Предъявляют жесткие требования к линиям связи:
- для передачи аналоговых сигналов преимущественно используют токовый сигнал в силу его помехоустойчивости (дальность передачи токового сигнала без существенных потерь – до 5 км);
- для передачи дискретных сигналов используют витые пары (в каждом проводе витой пары электромагнитная помеха наводит токи противоположных направлений).
Реле времени
Реле времени используют для регулирования продолжительности технологических операций и временнóго управления механизмами технологического оборудования.
По конструкции реле времени подразделяют на следующие группы:
- часовые;
- моторные;
- электронные.
Реле времени имеют различные диапазоны выдержек (например, 1…600 с; 1…24 ч) и обеспечивают погрешность ±0,6…2,5 %.
Для регулирования продолжительности нескольких технологических операций по заданной программе применяют командоаппараты или командоэлектроприборы. Это устройство предназначено для коммутации нескольких электрических цепей (N =3…16) и конструктивно выполнено в виде кулачкового вала с N регулируемыми кулачками и N группами переключающих контактов.
Рассмотрим схему i -ого звена командоаппарата.
1 – 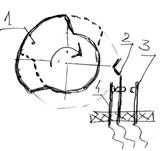 i -ый кулачок командоаппарата;
i -ый кулачок командоаппарата;
2 – подвижный контакт;
3 – неподвижный замыкаемый контакт;
4 – неподвижный размыкаемый контакт.
Настройка последовательности переключения контактов сводится к повороту i -ого кулачка на угол α i относительно начального положения кулачкового вала.
Настройка длительности включения возможна при использовании раздвижных кулачков, состоящих из нескольких секторов, поворачивающихся относительно друг друга (пунктирная линия на рис.).
Продолжительность рабочего цикла командоаппаратов составляет от 5 мин до 24 ч с погрешностью ±2,5 %.
|
|
|
|
|
Дата добавления: 2014-01-14; Просмотров: 355; Нарушение авторских прав?; Мы поможем в написании вашей работы!