КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Практическая реализация FMCW-радаров на примере разработок Bosch
|
|
|
|
FMCW-радары применяются компаниями Bosch, Denso и др. [109, 111–114, 116, 123, 131, 139].
Для того чтобы генерировать высокочастотный гигагерцовый сигнал, в FMCW-радарах часто используется генератор Гунна (Gunn VCO — Voltage Controlled Occillator) [109]. Если в радаре для приема и передачи используется одна и та же антенна, то в его состав входит также и циркулятор для мультиплексирования передаваемого и получаемого сигнала. Например, изобретение [113] представляет собой моностатический радарный датчик FMCW с одной общей антенной для передачи и получения сигнала, разделяемых циркулятором, изготавливаемым по специальной технологии. В патенте EP 498 542 A2 описан бистатический датчик FMCW с отдельными передающей и принимающей антеннами, позволяющий обойтись без дорогостоящего циркулятора, но требующий наличия двух антенн и двух диэлектрических линз.
Циркулятор — это устройство, пропускающее электромагнитные волны только одного направления. Различают электронные и ферритовые циркуляторы
В радарной системе Bosch с циркулятором (рис. 55а) получаемый сигнал комбинируется с передаваемым, формируя дифференциальный сигнал, определяемый промежуточной частотой IF, которая много ниже, чем частота передаваемого и получаемого сигнала. Следовательно, значения сэмплов промежуточной частоты подходят для дальнейшей обработки цифровыми процессорами, так как радарные датчики ACC работают в высокочастотном RF-диапазоне, а обработка сигнала для вычисления расстояния и относительной скорости функционирует в низкочастотном диапазоне (LF).
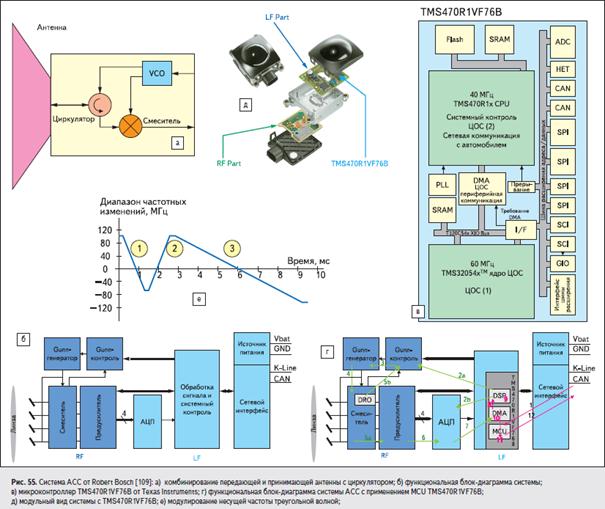
RF-часть ACC включает также схему, контролирующую осциллятор Гунна, смеситель и предусилитель (рис. 55б). LF-часть включает АЦП, схемы обработки оцифрованного сигнала, системного контроля, источника питания и сетевого интерфейса с автомобилем.
Для обработки моностатического радарного сигнала рекомендован микроконтроллер TMS470R1VF76B от Texas Instruments (рис. 55в), который включает два процессора — ARM7 RISC-микроконтроллер (MCU) и 16-разрядный цифровой сигнальный процессор с плавающей точкой на основе C54x (DSP). Процессор TMS470R1VF76B разработан специально для автомобильных применений, где требуется одновременно выполнять управляющие задачи и цифровую обработку. Связь между процессорами, коммуникация между собой различных периферийных интерфейсов и памяти может быть ускорена посредством прямого доступа к памяти direct memory access (DMA).
Применение микроконтроллера TMS470 R1VF76B в радарах Bosch позволяет достичь высокого уровня интеграции вычислительных функций в одном модуле и снижения числа системных компонентов для обработки сигнала, а также сократить геометрические размеры устройства. Радарная система строится на двух печатных платах, одна из которых содержит RF-часть (радарный датчик, Gunn VCO, предусилитель), а втораянизкочастотные LF-компоненты (источник питания, ЦОС, интерфейс с автомобильными сетями) (рис. 55г, д). Размеры современной системы Long-Range Radar 2 (LRR2) Adaptive Cruise Control System от Robert Bosch составляют 73×70×60 мм.
Программное обеспечение ACC Bosch выполняет следующую последовательность системных задач:
1. Прочитать данные, введенные через интерфейс HMI: скорость, временной интервал и текущие параметры управления по сигналам от датчиков (угла поворота рулевого колеса, скорости колес, курсового угла).
2.
а) Установка частотных пилообразных сигналов для передачи (начальная частота, конечная частота, время рампа);
б) настройка АЦП (время преобразования, число сэмплов).
3. Задание частоты передачи и запуск генератора Гунна.
4. Генерирование передаваемого сигнала.
5.
а) Одновременная передача сигнала через антенну и смешивание промежуточной частоты;
б) управляющий цикл для контроля генератора Гунна.
6. Фильтрация и усиление промежуточной частоты.
7. Дискретизация промежуточной частоты.
8. DMA-передача сэмплов к ЦОС.
9. ЦОС (часть 1).
10. Обмен данных, вычисленных в ЦОС.
11. ЦОС (часть 2).
12. Коммуникация через автомобильные сети (CAN) с ECU для регулировки скорости и расстояния.
Потенциальные объекты для регулировки скорости и расстояния обнаруживаются средствами радарных функций FMCW. Задачи спектрального анализа, обнаружение пиков и угловые измерения выполняются ЦОС. Задачи ЧМ, предсказывание положения, согласование частот, трассировка положения и кластерная фильтрация осуществляются микроконтроллером.
АКК компании Bosch основывается на ЧМ, применяемой (как пояснялось выше) с целью генерирования трех линейных частотных скатов различной длительности (рис. 55е). Сигнал передается одновременно на четыре антенны с различным угловым расположением. Для каждой антенны полученный сигнал комбинируется с передаваемым для формирования промежуточной частоты (всего для анализа положения объекта используется 12 частот).
В спектре промежуточной частоты для фильтрации шумов устанавливается определенный порог, частоты ниже порога исключаются. Пик вблизи нулевой частоты также исключается, так как он может быть результатом отражения сигнала от линз. Для дальнейших вычислений используются оставшиеся частоты.
Спектр 12 частот вычисляется из сэмплов 12 промежуточных частот посредством БПФ. Частоты в спектре IF представляют обнаруженный объект, который соответствует пикам, остающимся после фильтрации в частотном спектре IF [109]. Каждая частота в частотном спектре может быть назначена как линия скорости/расстояния (рис. 55ж) c уравнением FMCW:

где ƒ0 — несущая частота; ƒh — модуляционная частота; tM — период модуляции.

Если линии всех трех скатов пересекаются в точке на диаграмме скорости и расстояния, то подтверждается обнаружение объекта.
Если используется несколько принимающих антенн, то в дополнение к диапазону возможно определение и относительной скорости, и угла азимута. Суперпозиция всех принимающих антенн дает более чем одну точку пересечения для каждого объекта на диаграмме скорости и расстояния, что эквивалентно множественным отражениям от одного объекта, которые объединяются при вычислениях.
|
|
|
|
|
Дата добавления: 2014-01-14; Просмотров: 1145; Нарушение авторских прав?; Мы поможем в написании вашей работы!