КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Электрические фильтры. Общие положения
|
|
|
|
Фильтры применяются для выделения или подавления определенных колебаний, разделения частотных каналов, формирования спектра сигналов. Электрическим фильтром называется четырёхполюсник, пропускающий без ослабления или с малым ослаблением колебания определенных частот и пропускающий с большим ослаблением колебания других частот.
Полоса частот, в которой ослабление мало, называется полосой пропускания. Полоса частот, в которой ослабление велико, называется полосой непропускания (задерживания ). Между этими полосами находится переходная область.
По расположению на шкале частот полосы пропускания различают следующие фильтры:
а) нижних частот (ФНЧ), в которых полоса пропускания располагается на шкале частот от ω = 0 до некоторой граничной частоты ω = ωср, а полоса непропускания (задерживания) — от частоты ω = ωср до бесконечно больших частот (рисунок 10.1, а);
Рисунок 10.1 - Электрические фильтры
б) верхних частот (ФВЧ) с полосой пропускания от частоты ω = ωср до бесконечно больших частот и полосой непропускания от частоты ω = 0 до ω = ωср (рисунок 10.1,6);
в) полосовые (ПФ), в которых полоса пропускания от ωсрн до ωсрв располагается между полосами непропускания 0 - ωЗ1 и ωЗ2 - µ (рисунок 10.1,в);
г) заграждающие (режекторные) (ЗФ или РФ), в которых между полосами пропускания 0 - ωсрн и ωсрв - µ находится полоса непропускания ωсрн - ωсрв (рисунок 10.1, г);
д) многополосные, имеющие несколько полос пропускания.
На рисунке 10.1 показаны также условные графические обозначения фильтров каждого типа в соответствии с ГОСТ. В соответствии с используемой элементной базой к настоящему моменту выделились несколько классов фильтров. Исторически первыми (и все еще наиболее широко применяемыми) являются пассивные фильтры, содержащие элементы L и С. Они носят название LC-фильтров.
Во многих случаях на практике требовалась крайне высокая избирательность (различие ослаблений в полосах пропускания и непропускания в десятки тысяч раз). Это привело к появлению фильтров с механическими резонаторами: кварцевых, магнито-стрикционных, электромеханических.
Самые значительные достижения в области теории и проектирования фильтров связаны с успехами микроэлектроники. Требования микроминиатюризации аппаратуры заставили отказаться от использования индуктивностей, которые имеют большие габаритные размеры, особенно на низких частотах, и не поддаются исполнению в микроминиатюрном виде. Появились активные RС-фильтры, состоящие из резисторов, конденсаторов и активных приборов (например, транзисторов). Эти фильтры могут быть выполнены в виде микромодульной конструкции или интегральной схемы. Применение активных RС-фильтров ограничивается пока сравнительно небольшим диапазоном частот до нескольких мегагерц.
Разработка цифровых систем и достижения в области цифровых вычислительных машин стимулировали создание фильтров на базе элементов цифровой и вычислительной техники - цифровых фильтров.
Требования к электрическим характеристикам фильтров. Избирательность фильтра (степень разграничения полос пропускания и непропускания) определяется крутизной характеристики рабочего ослабления. Чем больше крутизна этой характеристики и чем сильнее ослабление в полосе пропускания, тем лучше избирательность фильтра и, следовательно, меньше уровень помех от подавляемых колебаний. Реальные фильтры (т. е. фильтры, состоящие из реальных элементов) имеют характеристики рабочего ослабления и амплитудно-частотную, отличные от идеальных.
Требования к электрическим характеристикам фильтров задаются в виде допустимых пределов изменения этих характеристик. Так,
а) рабочее ослабление в полосе пропускания не должно превышать некоторого максимального допустимого значения Аp max, а в полосе непропускания не должно быть ниже некоторого минимально допустимого значения Аp min. Изображены эти требования графически, как это сделано на рисунке 10.2, а. На этом рисунке wср и wЗ —граничные частоты полос пропускания и непропускания.
Рисунок 10.2 - АЧХ ФНЧ
Помимо требований к частотной зависимости рабочего ослабления (а значит, ик АЧХ) могут задаваться также требования к
б) фазочастотной характеристике фильтра (скажем, допустимые отклонения от линейного закона) и величине
в) нелинейных искажений (обусловленных, например, наличием железа в катушках индуктивности). Могут предъявляться требования и к другим характеристикам и параметрам фильтра. Ниже будем учитывать только требования к рабочему ослаблению иАЧХ.
Идеальные частотные характеристики фильтра заведомо нереализуемы. Частотные характеристики реальных фильтров могут лишь приближаться к ним с той или иной степенью точности в зависимости от сложности схемы фильтра.
Перед тем как перейти к конкретным электрическим фильтрам, необходимо сделать два замечания.
Во-первых, в теории фильтров принято иметь дело не с обычной угловой частотой w, а с нормированной частотой Ω = w/wн,
где wн - нормирующая частота. Обычно в качестве нормирующей частоты выбирают граничную частоту полосы пропускания wср, так что Ω = wср /wн = wср /wср = 1.
Во-вторых, имеет смысл подробно изучать только фильтры нижних частот, так как остальные типы фильтров (верхних частот, полосовые и заграждающие) могут быть легко получены из ФНЧ с помощью замены переменной (частоты) или, как принято говорить, с помощью преобразования частоты.
Фильтры типа k и m. Фильтром типа k называются лестничные схемы с взаимно-обратными сопротивлениями плеч  =r2. Элементарным фильтром типа k является Г-образная схема, представленная на рисунке 10.3, а. Сопротивления плеч этого фильтра взаимообратны: = L/C = r2. Сопротивление r =
=r2. Элементарным фильтром типа k является Г-образная схема, представленная на рисунке 10.3, а. Сопротивления плеч этого фильтра взаимообратны: = L/C = r2. Сопротивление r =  называется номинальным характеристическим сопротивлением фильтра.
называется номинальным характеристическим сопротивлением фильтра.
Характеристика собственного ослабления Ас фильтра (рисунок 10.3, 6) равна нулю в диапазоне частот 0≤Ω≤1 и монотонно растет по закону Ас = ArchΩ при изменении частоты от 1 до . Характеристические сопротивления фильтра  и
и  в полосе пропускания являются активными, но изменяются с ростом частоты по законам (рисунок 10.3, в):
в полосе пропускания являются активными, но изменяются с ростом частоты по законам (рисунок 10.3, в):
 и
и  . (1)
. (1)
Из двух Г-образных фильтров можно образовать симметричные Т-образные и П-образные фильтры.
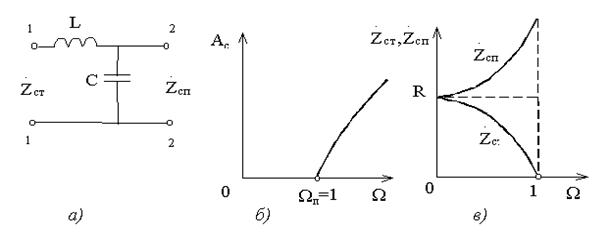
Рисунок 10.3 - Фильтр типа k (Г-образная схема)
Фильтры типа k обладают двумя существенными недостатками. Во-первых, они имеют малую крутизну характеристики ослабления Ас, что требует использования при построении реальных фильтров очень большого числа Г-, Т- или П-образных схем. Во-вторых, частотная зависимость характеристических сопротивлений в полосе пропускания не позволяет удовлетворительно согласовать фильтр с нагрузкой и генератором. Это приводит к потерям энергии за счет ее отражения и, как следствие, рабочее ослабление фильтра в полосе пропускания значительно отличается от нуля, особенно на краях полосы пропускания, где рассогласование наибольшее.
Чтобы избежать этих недостатков, используют фильтры типа т (рисунок 10.4), которые дают всплески ослабления Ас на частоте резонанса контуров Wµ. Своё название фильтры получили из-за того, что значения элементов фильтра типа m определяются значениями фильтра типа k и параметра  . Фильтры типа m
. Фильтры типа m
а) обладают меньшей частотной зависимостью характеристических сопротивлений в полосе пропускания, и
б) лучше согласуются с генератором и нагрузкой.
Но фильтры типа т
в) имеют в полосе непропускания глубокий спад ослабления Ас. Обычно используют каскадное соединение фильтров типа т и k. Фильтры типа k увеличивают ослабление в полосе непропускания, а фильтры типа т поднимают крутизну характеристики ослабления вблизи частоты среза.
Ввиду того, что фильтры типа т лучше согласуются с генератором и нагрузкой, их ставят по краям, а звенья типа k - в середине составного фильтра.
На рисунке 10.4 показан фильтр, состоящий из звеньев типа m.
Рисунок 10.4 - Фильтры типа m
|
|
|
|
Дата добавления: 2014-01-14; Просмотров: 2924; Нарушение авторских прав?; Мы поможем в написании вашей работы!