КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Регулирование частоты вращения двигателей постоянного тока
|
|
|
|
а) б)
Рис.4
Согласно (6.2), регулирование частоты вращения двигателей постоянного тока можно осуществлять путем изменения потока Ф, введения дополнительного сопротивления  в цепь якоря и изменения напряжения сети
в цепь якоря и изменения напряжения сети  . В двигателях параллельного возбуждения наиболее просто осуществляется регулирование изменением потока, реализуемого с помощью реостата
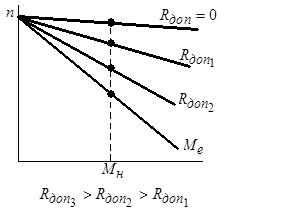
. В двигателях параллельного возбуждения наиболее просто осуществляется регулирование изменением потока, реализуемого с помощью реостата  в цепи возбуждения. При увеличении сопротивления поток Ф уменьшается и частота вращения растет. На рис. 4а представлены механические характеристики двигателя параллельного возбуждения при трех значениях потока. Таким способом регулируют частоту вращения в пределах
в цепи возбуждения. При увеличении сопротивления поток Ф уменьшается и частота вращения растет. На рис. 4а представлены механические характеристики двигателя параллельного возбуждения при трех значениях потока. Таким способом регулируют частоту вращения в пределах  ,
,  . Верхний уровень частот ограничивается условиями коммутации. Кроме того, при глубоком уменьшении потока возбуждения усиливается размагничивающее действие реакции якоря, жесткость механической характеристики растет, и падающая характеристика при номинальном потоке может стать возрастающей при ослабленном потоке, что приведет к нарушению устойчивой работы двигателя.
. Верхний уровень частот ограничивается условиями коммутации. Кроме того, при глубоком уменьшении потока возбуждения усиливается размагничивающее действие реакции якоря, жесткость механической характеристики растет, и падающая характеристика при номинальном потоке может стать возрастающей при ослабленном потоке, что приведет к нарушению устойчивой работы двигателя.
Регулирование частоты вращения двигателя путем введения в цепь якоря дополнительного сопротивления позволяет изменять частоту вращения вниз от номинальной в широких пределах (рис. 4 б). Но этот способ не экономичен. Полезная мощность двигателя при постоянном моменте пропорциональна частоте вращения (без учета потерь в якоре):
 ,
,
а потребляемая из сети мощность от частоты вращения не зависит,
 .
.
Поэтому КПД двигателя пропорционален частоте вращения якоря,
 .
.
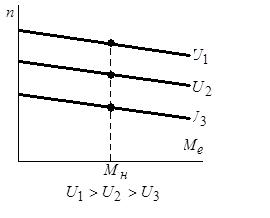
Рис.5
Кроме того, при введении дополнительного сопротивления жесткость механической характеристики двигателя снижается, что может привести к ухудшению работы приводного механизма.
|
|
|
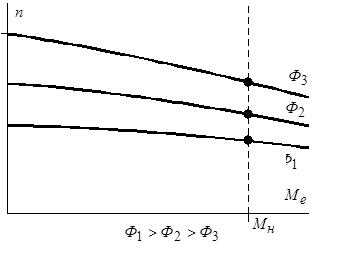
Более совершенным способом регулирования частоты вращения вниз является регулирование путем изменения подводимого к двигателю напряжения. На рис. 5 представлены механические характеристики двигателя параллельного возбуждения для трех значений напряжений. Жесткость механических характеристик практически не меняется, поэтому таким способом можно регулировать частоту вращения от номинальной до нуля.
В качестве источников регулируемого напряжения используются генератор постоянного тока (рис. 2, а) либо полупроводниковый выпрямитель (рис. 2, б). Схема с полупроводниковым выпрямителем обладает более высоким быстродействием по сравнению со схемой генератор-двигатель, но уступает по перегрузочной способности. Кроме того, работа полупроводникового преобразователя ухудшает качество электрической энергии сети переменного тока из-за генерации высших гармоник напряжения и тока.
Рассмотренные способы регулирования частоты вращения двигателей параллельного возбуждения применяются и в двигателях смешанного возбуждения.
Регулирование частоты вращения двигателей последовательного возбуждения осуществляется путем изменения тока в последовательной обмотке  или напряжения якоря U с помощью шунтирующих реостатов (рис. 6.46).
или напряжения якоря U с помощью шунтирующих реостатов (рис. 6.46).
При шунтировании обмотки возбуждения ток уменьшается и частота вращения якоря растет, а при шунтировании якоря напряжение якоря уменьшается, поэтому частота вращения падает.
Регулирование частоты вращения вверх осуществляется практически при постоянном КПД
 .
.
Верхний уровень частоты вращения ограничивается условиями коммутации.
Регулирование частоты вращения вниз может осуществляться вплоть до нуля, однако КПД этого способа снижается пропорционально напряжению якоря и частоте вращения:
 ,
,
где  - частота вращения якоря при
- частота вращения якоря при  .
.
Таким образом, этот способ регулирования так же, как и реостатный способ регулирования частоты вращения двигателя с параллельным возбуждением, является неэкономичным. Он используется лишь в случае двигателей малой мощности.
|
|
|
|
|
|
|
|
Дата добавления: 2014-01-14; Просмотров: 310; Нарушение авторских прав?; Мы поможем в написании вашей работы!