КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Роль автоматизированного электропривода в производстве
|
|
|
|
Причиной широкого внедрения электропривода является простота распределения электроэнергии, преимущества электродвигателей перед другими источниками механической энергии, простота управления потоком энергии.
Тенденции в развитии современного электропривода. Расширение областей применения электропривода, снижение габаритов электрических машин, повышение надёжности, совершенствование методов расчётов и проектирования. Электропривод представляет собой электромеханическое устройство, предназначенное для приведения в движение рабочей машины и управления её технологическим процессом. Электропривод состоит из механической передачи, электродвигателя и системы управления.
Автоматизированный электропривод представляет собой сложную электромеханическую систему, электрическая и механическая части которой находятся в постоянном взаимодействии. Отдельные элементы электропривода содержат различные накопители электрической, электромагнитной, тепловой и механической энергии, а также различные преобразователи энергии (трансформаторы, электромеханические генераторы, вентильные преобразователи), связанные между собой механическими, электрическими или магнитными связями. При неустановившихся процессах происходят непрерывное преобразование энергии и передача ее из одного накопителя в другой.
При изучении механики электропривода учитывается изменение лишь механической энергии, накапливаемой в движущихся частях электродвигателя, передаточного устройства и рабочей машины. Изменения электромагнитной или электрической энергии не учитываются как малые величины. Такой учет проводится при изучении переходных процессов, которым посвящен специальный раздел курса теории электропривода.
Механическая часть электропривода может иметь развитую многомассовую структуру с упруговязкими механическими элементами, например с длинными валами или канатами, связывающими движущиеся массы с постоянными моментами инерции. В некоторых механизмах (например, в транспортерах, разливочных машинах) величина движущейся массы (или момент инерции) меняется в процессе движения. Наконец, есть электроприводы, у которых передаточное устройство между двигателем и рабочей машиной имеет меняющееся передаточное число (например, у кривошипно-шатунных механизмов), что влияет на расчетное значение момента инерции и динамического момента на валу двигателя.
Изучение механики электропривода при полном учете всех механических инерции и всех связей между ними весьма сложно, а иногда и невозможно из-за недостатка информации. Поэтому (особенно на первом этапе изучения механики электропривода) очень важны сравнительная оценка различных действующих факторов, выявление главных из них, то есть составление упрощенной расчетной электромеханической схемы, учитывающей лишь определяющие инерционные элементы, связи между ними, действующие усилия и моменты. При преобразовании энергии в электроприводе неизбежны потери ее в передаточном и электродвигательном устройствах. Эти потери, направление потоков энергии при различных режимах работы электрических машин привода изучаются в механике электропривода.
Классификация электроприводов.
Классификационные признаки:
1) по типу электродвигателей, используемых в приводе;
2) по типу преобразователя электрической энергии;
3) по способу передачи механической энергии от двигателя к рабочей машине;
В зависимости от выполняемых функций, вида и числа регулируемых координат, степени автоматизации технологических процессов, реализация ЭП может быть самой разнообразной. Все ЭП делятся на неавтоматизированные и автоматизированные. Автоматизированный привод может быть разомкнутый и замкнутый. Замкнутый привод используется с регулированием по отклонению, возмущению и комбинированным регулированием.
В механическом движении участвуют: подвижная часть электродвигателя (ротор или якорь), элементы механического передаточного устройства и исполнительный орган. Совокупность этих элементов называют механической частью ЭП. Уравнения движения по своему характеру являются дифференциальными, так как содержат производные скорости, массы и момента инерции. В большинстве случаев массы и моменты инерции элементов при движении не изменяются, а производные оказываются равными нулю. Движение любого элемента механической части ЭП подчиняется законам механики:
Если  то производные этих уравнений равны нулю, и элемент движется с постоянной скоростью или находится в состоянии покоя. Такое движение называют установившимся. При
то производные этих уравнений равны нулю, и элемент движется с постоянной скоростью или находится в состоянии покоя. Такое движение называют установившимся. При элемент движется с ускорением, а при
элемент движется с ускорением, а при  - c замедлением. Элементы механической части ЭП связаны между собой, оказывают друг на друга воздействия. Чтобы учесть такие воздействия, проводят операцию приведения моментов инерции и моментов сопротивления. Приведение можно приводить к любому параметру, чаще всего к скорости двигателя. В общем случае уравнения движения ЭП имеет вид:
- c замедлением. Элементы механической части ЭП связаны между собой, оказывают друг на друга воздействия. Чтобы учесть такие воздействия, проводят операцию приведения моментов инерции и моментов сопротивления. Приведение можно приводить к любому параметру, чаще всего к скорости двигателя. В общем случае уравнения движения ЭП имеет вид:
 .
.
Это соотношение имеет место при J=const. При J=varia .
.
Под устойчивостью понимается свойство системы двигатель - исполнительный орган поддерживать движение с установившейся скоростью или с минимально возможным отклонением от неё. Такая система называется устойчивой. Проверка на устойчивость может быть выполнена с использованием понятия жёсткости характеристик. При устойчивом движении  .
.
Принципиальные схемы электропривода определяют полный состав элементов функциональных частей электропривода и связи между ними и, как правило, дают детальное представление о принципах работы электропривода. Они служат основанием для разработки других конструкторских документов, например схем соединений и подключений. Пользуются принципиальными схемами для изучения работы электроприводов, а также при их наладке, регулировке, контроле и ремонте.
На принципиальной схеме электропривода (рисунок 5.3) изображают все элементы его устройств и их функциональных частей, необходимые для осуществления и контроля заданных динамических и статических процессов электропривода, и все электрические, магнитные и некоторые механические связи между ними, а также электрические элементы, которыми заканчиваются входные и выходные цепи (выводы, зажимы, соединители).
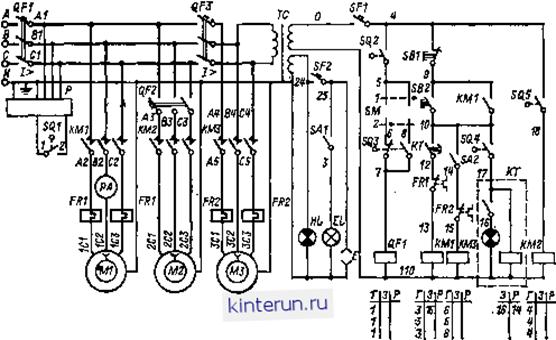
Рисунок 5.3 Принципиальная схема электропривода
Элементы на принципиальной схеме изображают в виде условных графических обозначений по ЕСКД. Сложные устройства электропривода, например преобразователи, усилители, имеющие свои принципиальные схемы, разрешается в принципиальной схеме электропривода рассматривать как элемент и вычерчивать в виде прямоугольника или другого обозначения с выходными цепями.
Для получения наиболее простого начертании схемы (с минимальным количеством изломов и пересечений линий связей) условные графические обозначения элементов допускается вычерчивать на схеме повернутыми на угол, кратный 90 °, или в зеркальном изображении. В отдельных случаях, если это упрощает графику схемы или обеспечивает более выразительное представление отдельных цепей, условные графические обозначения допускается поворачивать на угол, кратный 45.
В настоящее время существует огромное количество разновидностей электроприводов. Их можно в первом приближении разделить на группы по следующим основным признакам.
Классификация электроприводов по характеру движения:
· поступательного и вращательного движения;
· регулируемые и нерегулируемые;
· непрерывного и дискретного действия;
· однонаправленные и двунаправленные (реверсивные);
· вибрационные (реализующие возвратно-поступательное движение).
Классификация электроприводов по числу используемых электродвигателей:
· групповые электроприводы;
· индивидуальные;
· взаимосвязанные электроприводы.
Групповой электропривод содержит один электродвигатель, приводящий в движение несколько исполнительных механизмов одной рабочей машины или один исполнительный механизм нескольких рабочих машин. Индивидуальный электропривод содержит один электродвигатель, приводящий в движение один исполнительный механизм рабочей машины.
Взаимосвязанный электропривод содержит два и более электродвигателей, приводящих в движение один и более исполнительных механизмов. При этом, если электродвигатели связаны между собой механически (работают на 1 вал), то электропривод называют многодвигательным. Если же электродвигатели связаны только электрическими цепями, то электропривод называют электрическим валом.
|
|
|
|
|
Дата добавления: 2014-10-15; Просмотров: 3031; Нарушение авторских прав?; Мы поможем в написании вашей работы!