КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Приклад 2
|
|
|
|
Простою ілюстрацією застосування нечіткої логіки може слугувати й автоматичний регулятор швидкості потяга. Критерієм для регулятора є оптимізація часу руху при відомих обмеженнях. Вхідними даними є поточні значення швидкості, прискорення і відстані до місця призначення, на основі яких регулятор керує потужністю двигуна (рис. 13.8).
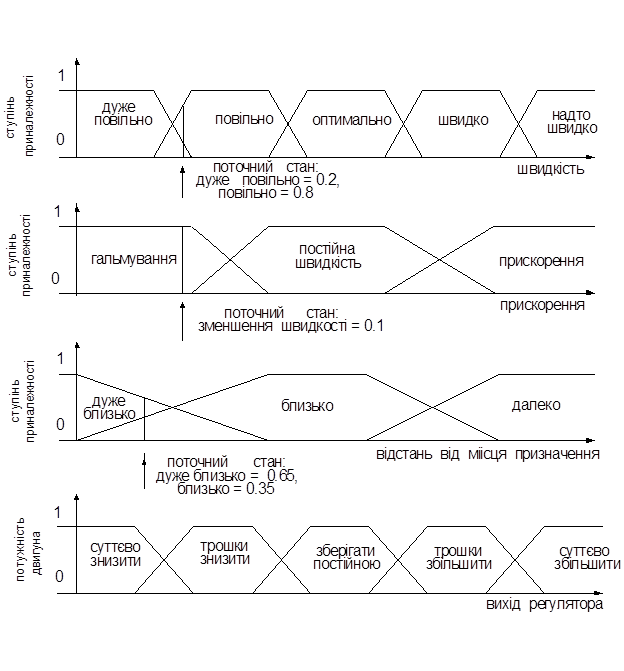 Рис. 13.8. Функції приналежності регулятора швидкості на основі
Рис. 13.8. Функції приналежності регулятора швидкості на основі
нечіткої логіки.
Функція приналежності присвоює вимірюваним величинам лінгвістичні значення. У наведеному прикладі прискорення має значення “гальмування”, обумовленого крутим підйомом. Швидкість належить до множини “повільно” (вага 0.8) і “надто повільно” (вага 0.2), а відстань має значення “дуже близько до місця призначення” з вагою 0.65 і “близько” з вагою 0.35.
Декілька правил можуть дати уявлення про логіку керування:
- якщо швидкість має значення “дуже повільно”, а прискорення –“гальмування”, то потрібно “значно збільшити” потужність;
- якщо швидкість має значення “повільно”, а прискорення –“гальмування”, то потрібно “трошки збільшити” потужність;
- якщо відстань має значення “близько”, то потрібно “трошки зменшити” потужність.
Яке правило повинно бути вибрано? Вихід також має ступінь довіри, який залежить від ступеня довіри (тобто ваги) вхідних даних. Кінцевий вибір у розглянутому прикладі – “трошки збільшити” потужність”. Навіть якщо швидкість має значення “ дуже повільно”, то потяг вже близько до місця призначення.
Нечітке керування виявляється особливо корисним, коли технологічні процеси є надто складними для аналізу за допомогою загальноприйнятих кількісних методів або коли доступні джерела інформації інтерпретуються неточно чи невизначено. Наявність математичних засобів відображення нечіткості початкової інформації дає змогу побудувати модель, адекватну реальності.
Перспективними нечіткі системи керування вважаються, наприклад, для керування повітряним та залізничним транспортом, і особливо в умовах хаотично організованого зовнішнього середовища. Характерним прикладом може бути система регулювання процесу відчинення-зачинення автоматичних дверей (об’єкт керування) в аеропорту [ ]. Хаотичним зовнішнім середовищем у цьому випадку є нерівномірний потік (наближення - віддалення) пасажирів. При русі потоку пасажирів через дев’ять секцій з сенсорами вимірюються наступні параметри: швидкість руху окремої людини в потоці; поточна позиція дверей; час, необхідний для досягнення і проходження дверей; антропометричні дані людини (зріст, вага); відстань між пасажирами, які рухаються. Ці сигнали є вхідними параметрами для блоку нечіткого логічного виводу, база знань якого містить 301 продукційне правило. Вихідними параметрами цього блоку є змінні керування швидкістю і часом початку процесу відчинення - зачинення дверей. Критерієм якості роботи системи керування є час очікування пасажиром відчинення дверей. Як показали експерименти, час очікування пасажиром відчинення дверей при застосуванні нечіткого регулятора зменшився в середньому на 87% порівняно з традиційним методом стохастичного керування.
Нечітка логіка набула надзвичайної популярності при розробці систем керування в Японії, хоча в США, де була створена, та в інших західних державах до неї ставляться доволі стримано, оскільки нема повної гарантії, що нечітка логіка завжди може успішно справлятися із складними системами. Регулятор на базі нечіткої логіки є практично оцінкою стану системи, яка не грунтується на конкретній моделі. Довести стійкість такого регулятора дуже складно.
Аналогічно іншим технічним рішенням, використання нечіткої логіки повинно розглядатися з огляду на ефективність, тобто досягнення прийнятних результатів при розумних затратах. Не можна розглядати нечітку логіку як завжди правильне рішення або як просту альтернативу більш складним системам керування.
На завершення необхідно додати, що фірми - виробники контролерів, у тому числі й з нечіткою логікою, такі, наприклад, як Schneider Electric, Klockner Moeller, надають користувачам відповідне програмне забезпечення для автоматизованого проектування нечітких регуляторів. При цьому засобами нечіткої логіки можуть бути реалізовані також ПІ- та ПІД-регулятори. Це тверження грунтується на теоремі FAT (Fuzzy Approximation Theorem), доведеною Б. Коско (B. Kosko) у 1993p., відповідно до якої будь-яка математична система може бути апроксимована системою, основаною на нечіткій логіці. За певних умов універсальним апроксиматором може слугувати логічний контролер Мамдані.
Потужним засобом для практичної реалізації подібних задач є також пакет нечіткої логіки (Fuzzy Logic Toolbox) – одна із складових частин MATLAB. Він, зокрема, дає можливості конструювання систем нечіткого виводу (нечітких експертних систем, регуляторів, апроксиматорів залежностей) і забезпечує інтерактивне динамічне моделювання в Simulink [ ].
|
|
|
|
|
Дата добавления: 2014-10-31; Просмотров: 448; Нарушение авторских прав?; Мы поможем в написании вашей работы!